基于神经网络的气动肌肉自适应滑模控制毕业论文
2020-02-17 21:59:33
摘 要
气动肌肉是一种新型的驱动器,有着与生物肌肉相似的力学特性,因此适用于作为康复机器人的驱动器,在康复领域有广泛的应用前景。然而气动肌肉具有很高的非线性和时变特点难以对其进行准确有效的控制。
本文对气动肌肉的数学模型及其控制理论进行了比较研究。采用气动肌肉三元素经验模型对其进行数学建模并实现基于三元素模型的滑模控制方法。在传统滑模控制的基础上,加入RBF神经网络,利用其较好的趋向性来弥补三元素经验建模实验造成的实验误差以及未知干扰。实验结果表明加入神经网络后的自适应滑模控制在保持控制的稳定性的同时提高了响应速度与鲁棒性,相比传统滑模控制更具实际应用意义。
关键词:气动肌肉;神经网络;滑模控制;三元素模型
Abstract
As a new type of actuator, pneumatic muscle has similar characteristics with biological muscle. It can be used as an actuator of rehabilitation robot and has a wide application prospect in the field of rehabilitation. However, pneumatic muscle has high nonlinearity and time-varying characteristics, and it is difficult to control it accurately and effectively.
In this paper, the mathematical model and control method of pneumatic muscle are studied. The three-element empirical model of pneumatic muscle is used to model and realize the sliding mode control method based on the three-element model. On the basis of traditional sliding mode control, RBF neural network is added to compensate for the error caused by three-element empirical modeling experiment by its better tendency. The experimental results show that the control method improves the response speed and robustness while maintaining the control stability. Compared with the traditional sliding mode control, it has more practical significance.
Key Words:pneumatic muscle; neural network; sliding mode control; three-element model
目录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
1.2.1气动肌肉建模国内外研究现状 1
1.2.2 气动肌肉控制国内外研究现状 2
1.3 本文研究内容及安排 3
第2章 气动肌肉滑模控制原理与仿真分析 4
2.1 气动肌肉及其三元素现象模型 4
2.1.1 三元素建模实验 5
2.1.2 三元素参数测量结果 5
2.2 基于神经网络的自适应滑模控制 8
2.2.1 气动肌肉的滑模控制 8
2.2.2 神经网络自适应滑模控制 9
2.3 仿真结果分析 11
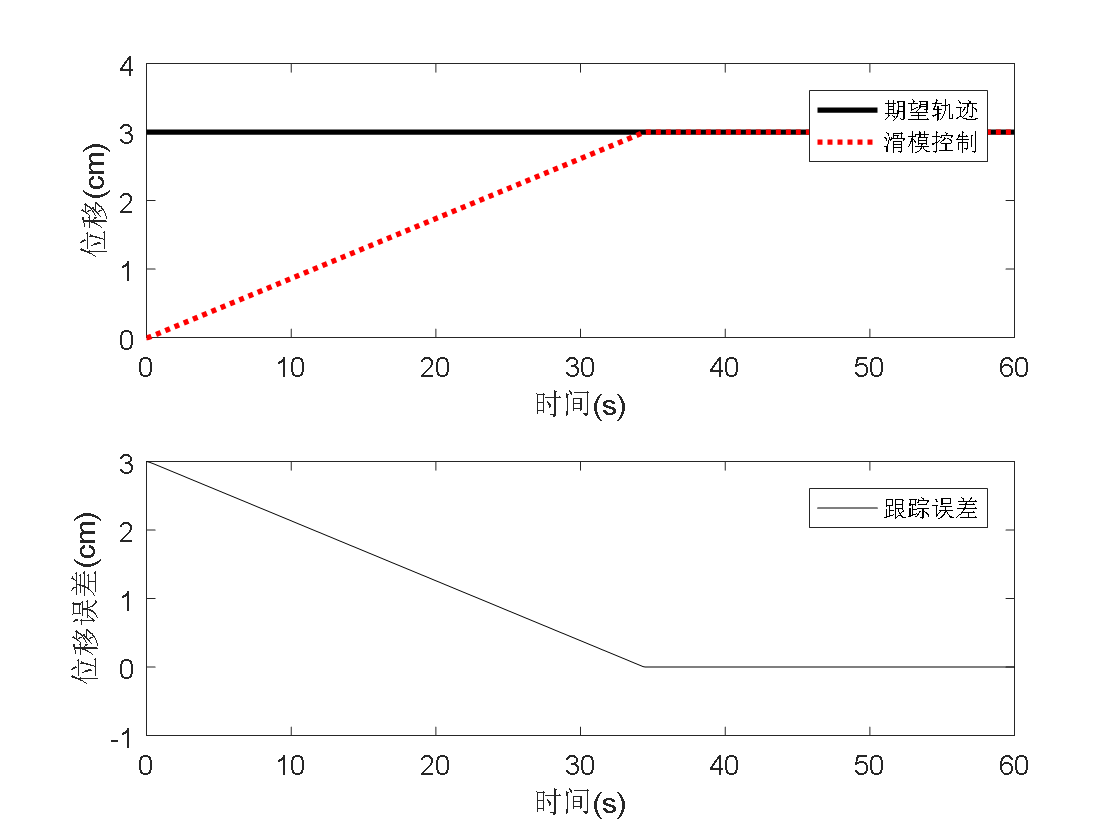
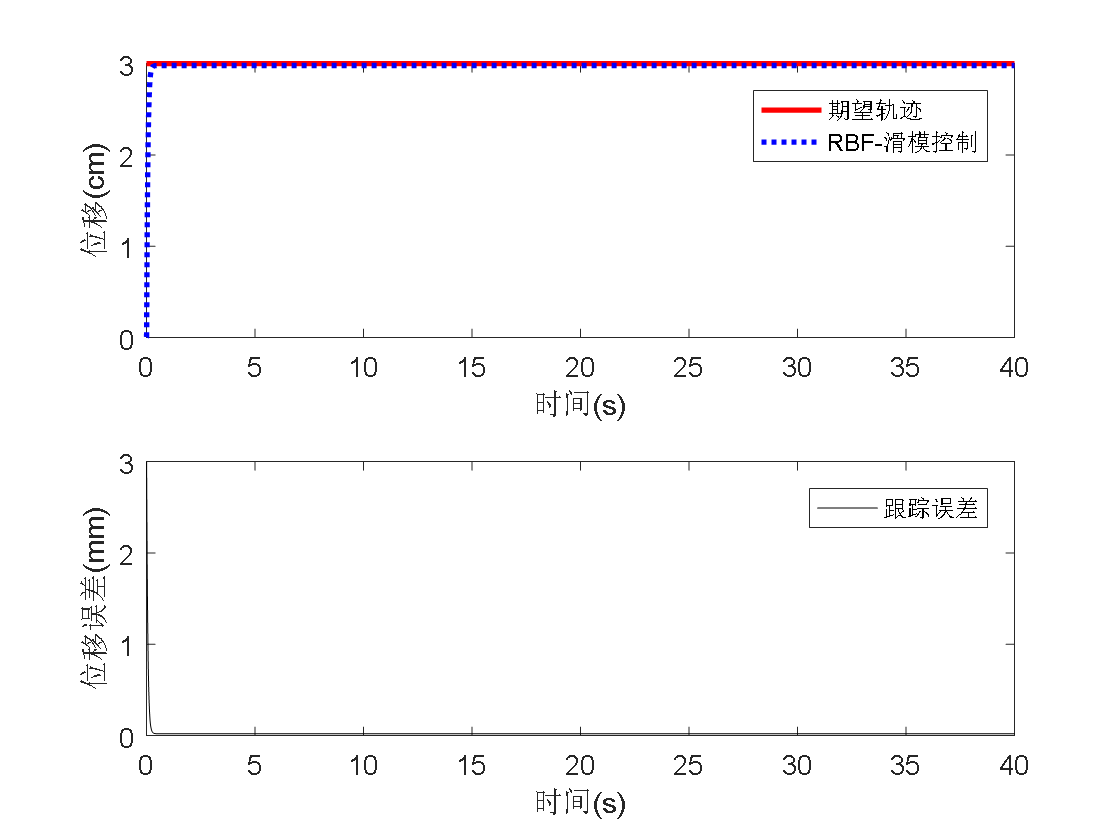
2.3.1 阶跃响应对比分析 11
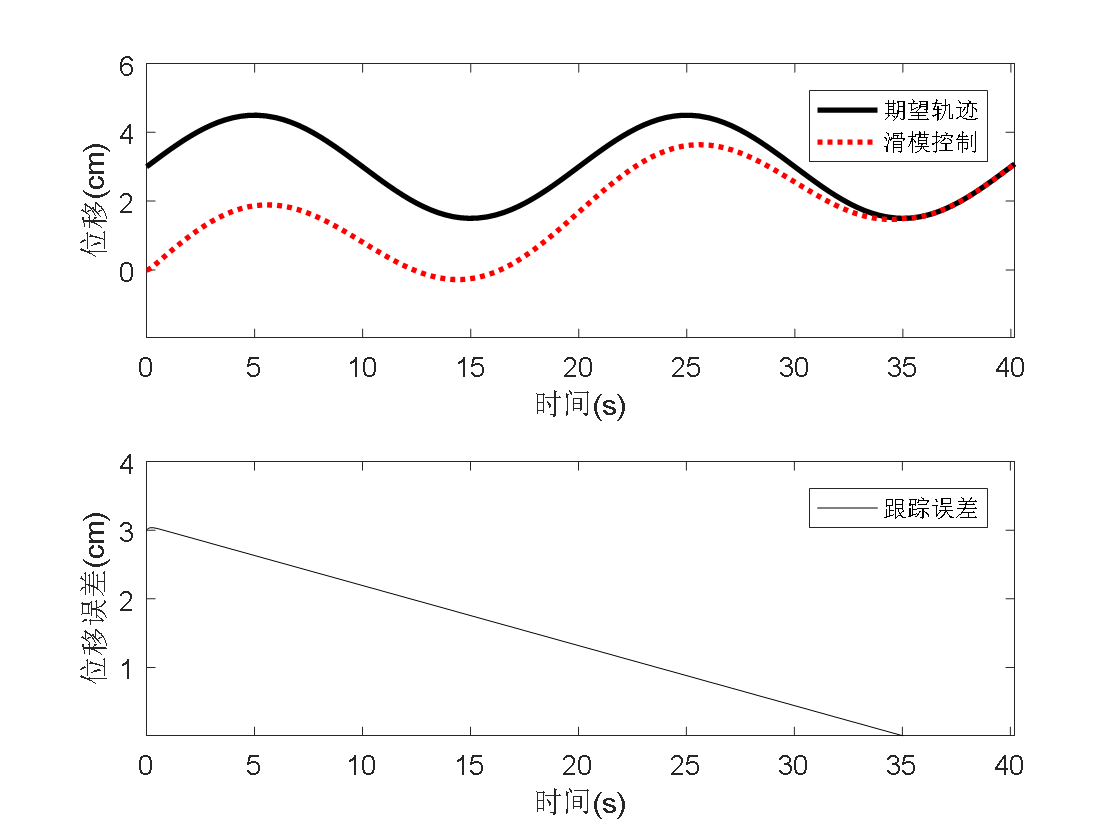
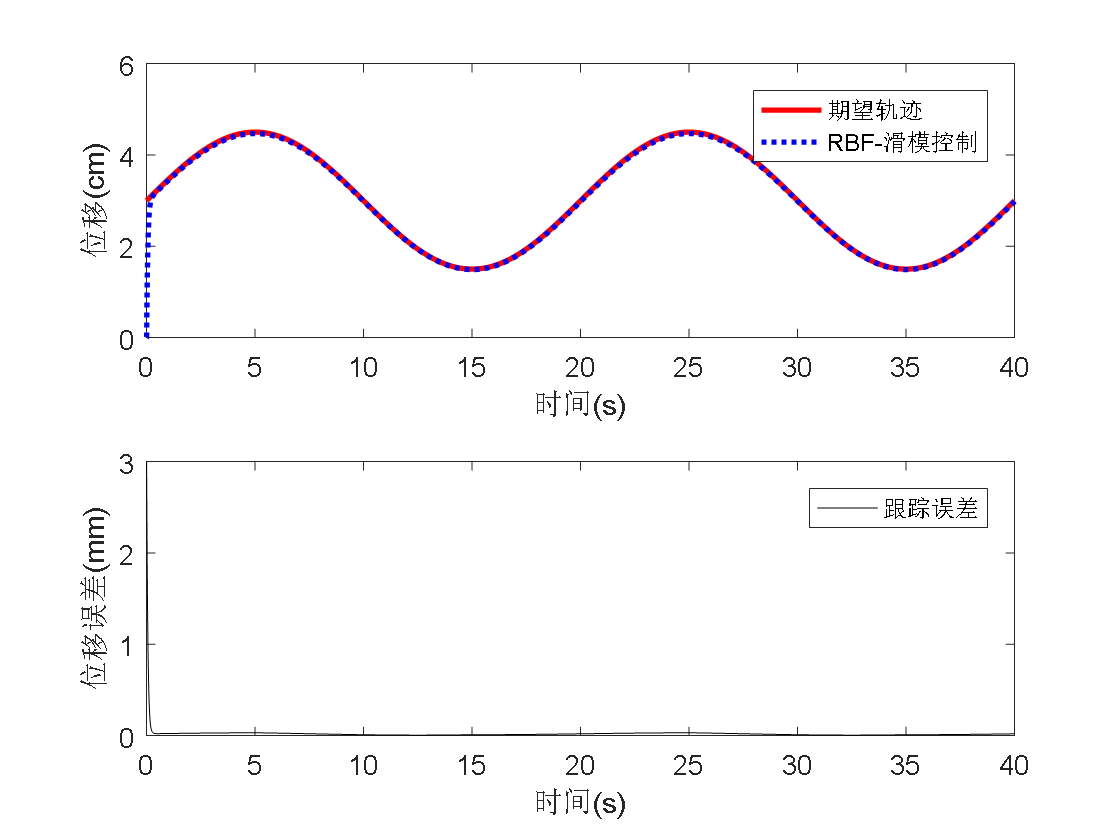
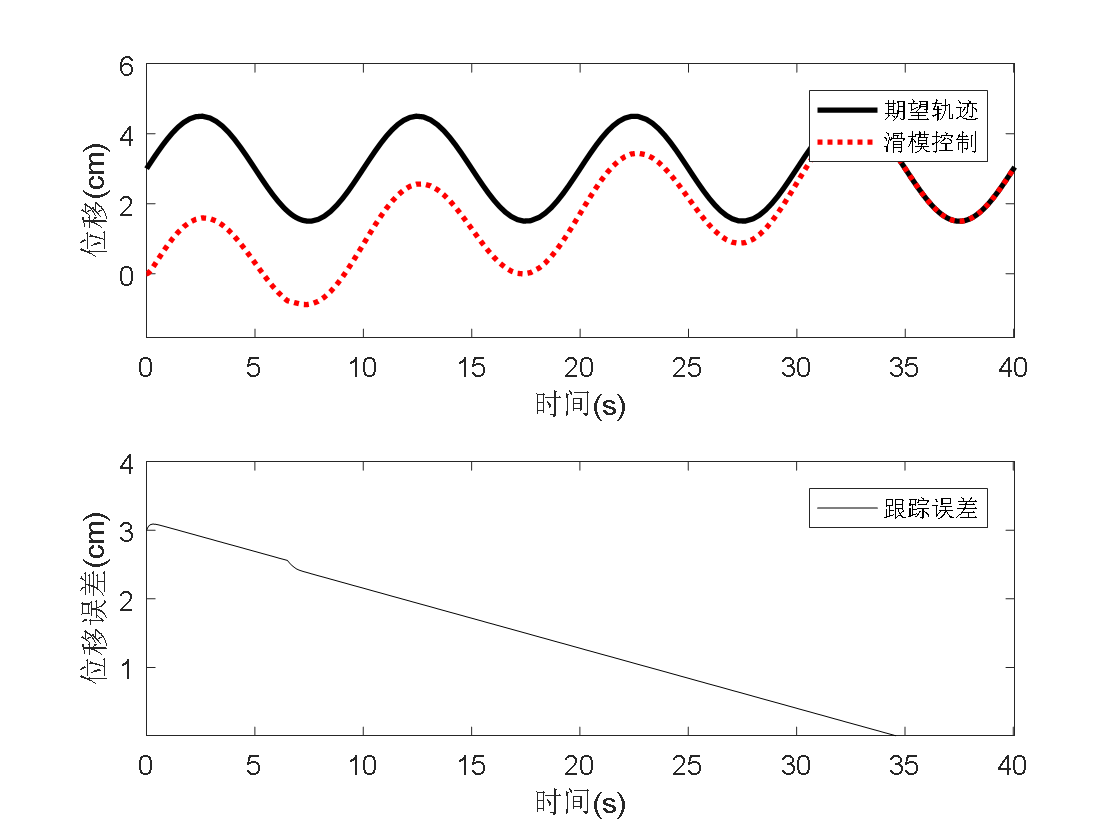
2.3.2 正弦响应对比分析 12
2.3.3 结果分析总结 13
第3章 单根气动肌肉控制系统及实际测试结果分析 14
3.1 控制平台系统设计 14
3.1.1 控制平台系统软硬件组成 14
3.2 测试结果及分析 16
3.2.1 控制系统阶跃响应对比分析 16
3.2.2 控制系统正弦响应对比分析 17
3.3 本章小结 19
第4章 总结与展望 20
4.1 全文工作总结 20
4.2 下一步研究工作展望 20
致 谢 21
参考文献 22
第1章 绪论
1.1 研究背景及意义
随着我国人口老龄化进程的加剧,行动障碍患者人数逐年增加。患者病后运动功能的复建成为研究的热点。有研究表明,人体中枢神经系统具有高度可塑性[1]。患者利用康复机器人通过特定的功能训练可以促进中枢神经的恢复重组,进而改善患者的运动机能。这使得医疗康复机器人具有部分代替康复治疗师的作用。由于目前我国医疗资源紧张,因此康复机器人吸引了研究人员的注意,康复机器人的相关理论与技术得到了广泛的研究与探讨。康复机器人可以分为刚性康复机器人和柔性康复机器人。由于刚性康复机器人柔顺性差,容易对患者造成二次伤害。而以气动肌肉为驱动器的柔性康复机器人则具备较好的柔顺性适用于临床康复领域。
气动肌肉作为一种新型驱动器,具有与生物肌肉相似的力学特性,易于小型化,无污染,因此非常适合作为康复机器人的驱动器,在康复领域有着广泛的应用前景。
然而气动肌肉具有较高的非线性与时变特性,难以对其进行准确有效的控制。目前对气动肌肉的控制方法主要包括传统滑模控制,PID控制、模糊控制以及状态回声网络等等。
由于传统滑模控制对建模参数精度要求较高且容易造成高频抖振,PID在控制非线性、时变和结构不确定的复杂过程时工作的稳定性较差且无法通过调节参数获得更好的效果。模糊控制精度提高后会增加量化级数,控制器的实时性造成影响。
因此本文在三元素经验建模的基础上,采用结构简单的滑模控制并加入RBF神经网络对建模中参数误差进行补偿,从而抑制滑模控制附带的高频抖振,提高对气动肌肉的控制精度、响应速度和鲁棒性。
1.2 国内外研究现状
1.2.1气动肌肉建模国内外研究现状
建立有效的气动肌肉数学模型是对气动肌肉进行精确控制的第一步。气动肌肉虽然结构较为简单,但其内部作用机理却十分复杂。由于橡胶管壁厚度的可变性、空气的可压缩性以及管与护套之间的存在着摩擦等诸多因素,气动肌肉具有很高的非线性和时变特性。因此很难对气动肌肉进行精确有效的建模。
目前的气动肌肉模型大多是基于能量守恒的理论模型。华盛顿大学的Hannaford由能量守恒原理建立了气动肌肉的理论模型,得到了气动肌肉中收缩力、压强和长度之间的关系式[2]。TSAGARAKIS等则考虑到气动肌肉充气膨胀时的端部非圆柱体形变等因素,建立了气动肌肉收缩与伸长两种不同状态下的数学模型[3]。Klute则考虑了气动肌肉内橡胶材料特性所引起的弹性力,在基本的原理模型表达式基础上采用非线性的Mooney-Rivlin数学表达式来描述气动肌肉内部橡胶管特性[4]。
部分研究人员观察到了气动肌肉的迟滞现象,即在相同负载下,同一气动肌肉处在充气和放气两种不同状态下时,气动肌肉位移相同时而内部气压不一样。Tondu观察到了气动肌肉的迟滞现象,认为气动肌肉内部橡胶管与编织网的摩擦,编织网纤维之间的摩擦,以及橡胶管的充气时的形变都共同导致了气动肌肉的迟滞现象,并且这种迟滞现象与其历史运动位移相关[5]。
在国内,刘荣等对Chou提出的气动肌肉理论模型进行了研究和改进,并建立了拮抗肌形式的气动肌肉驱动关节的数学模型[6]。田社平通过对气动肌肉受力分析来建立静态力学方程[7]。杨钢等则将气动肌肉视为变截面气缸,考虑其充放气的热力学过程,获得了气动肌肉的动力学模型[7]。
由于在理论模型中很难获得某些参数的精确值,Reynolds等提出了基于经验的气动肌肉三元素现象模型[8]。三元素模型包括收缩元,弹力元和并联阻尼元。Balasubramanian等将气动肌肉建模为可变刚度的机械弹簧,采用多项式来描述PAM的动力学[9]。
综上所述,国内外对气动肌肉进行了较为细致的建模研究,对气动肌肉的工作原理进行了详细的分析,并基于气动肌肉的运动现象提出了较为精确的数学模型。
然而考虑到基于能量守恒的理论模型中许多参数,如气动肌肉顶端形变等获取难度较大,因此本文采用Reynolds提出的相对简单的三元素经验模型来分别对气动肌肉的静态特性和动态特性进行分析。通过对实验所得数据进行筛选和处理,使用最小二乘法拟合得到气动肌肉的三元素实验模型参数。
1.2.2 气动肌肉控制国内外研究现状
由于气动肌肉具有很高的非线性和时变特性,因此在实际运用中很难对气动肌肉进行精确的控制。K. Kawashima等人根据线性化的PM动态模型,采用PID控制完成由伺服阀和气动肌肉驱动的7自由度机械手臂的控制。但是,基于线性方法设计的控制器仅仅对特定的工作范围有效[10]。因此,针对气动肌肉的非线性控制算法研究也广泛开展。为了解决以上问题,Repperger等人提高实验拟合的数学模型设计了增益调节非线性反馈控制器对气动人工肌肉系统进行控制[11],其后又尝试了模糊Backstepping[12],自适应 Backingstepping,和变结构控制等多种控制方法[13],通过几种控制方法的比较,指出普通的 Backstepping方法控制效果较差,而自适应 Backstepping与变结构控制能够获得满意的控制效果,但采用常规VSC控制会产生剧烈的抖振现象,不适合实际应用。
研究人员针对气动肌肉对不同气压范围具有不同的非线性特性的特点提出了滑模控制来验证气动肌肉建模的有效性。然而在实际的气动肌肉控制系统中,难免存在例如建模误差、摩擦甚至损耗等不确定因素。在传统滑模控制中,这些不确定项很容易引起高频抖振以及跟踪不精确的问题。因此为了尽可能减少这些不确定项在实际系统中造成的影响,有关研究人员通过引入模糊补偿,通过李雅普诺夫稳定性分析提出基于模糊补偿的滑模控制来实现气动肌肉系统的高精度控制。
我国最早开始对气动肌肉的控制理论进行研究的是宗光华教授,他采用了变结构控制理论实现了气动肌肉驱动的机械手指夹持力控制[14]。杨钢通过使用两层滑模模糊变结构控制策略来实现对气动肌肉位置的精确控制,抑制了单纯使用传统滑模控制给控制系统带来的高频抖振,单根气动肌肉的稳态控制精度可达到±0.3mm[15]。田社平采用极点配置自适应预测控制的方法实现了气动肌肉较高精度的位置控制[16]。
综上所述,气动肌肉建模控制方法都得到了广泛而深入的研究,国内外研究大多使用较为复杂的控制理论,获得了较好的控制效果。因此本文在传统的滑模控制的基础上加入RBF神经网络并尝试对传统的气动肌肉滑模控制进行改进。
1.3 本文研究内容及安排
本文在建立三元素经验模型的基础上,采用神经网络自适应滑模控制,引入RBF神经网络弥补三元素建模中造成的误差,由此提高气动肌肉系统的控制精度和鲁棒性。
本论文共分为四章,各章节的主要内容安排如下:
第一章,绪论。介绍了气动肌肉的应用价值、研究背景及意义,以及介绍了气动肌肉的建模策略及其控制理论研究的国内外现状。同时对本文的主要研究内容做了简要概括。
第二章,气动肌肉滑模控制原理与仿真分析。介绍了气动肌肉三元素经验建模的原理以及测量气动肌肉三元素经验模型参数的实验流程。得到气动肌肉三元素具体参数后,通过Matlab的Simulink平台对气动肌肉滑模控制与神经网络自适应滑模控制两种控制方法的控制效果进行仿真以及对比分析。
第三章,实物平台设计及测试分析。阐述了气动肌肉控制平台并通过气动肌肉控制平台进行实物测试以及对控制系统进行进一步优化。并对气动肌肉传统滑模控制与神经网络自适应滑模控制两种控制方法的实际控制效果做出对比分析。
第四章,总结与展望。对全文所做工作进行总结,指出目前研究的不足之处,并对未来研究方向进行展望。
总之,本文的主要工作流程分为以下几点:首先、通过实验测量气动肌肉三元素模型参数,处理实验数据获得气动肌肉三元素的具体参数,建立气动肌肉三元素模型。其次、在matlab的Simulink仿真平台上利用滑模控制来验证气动肌肉模型的有效性并对气动肌肉传统滑模控制与神经网络自适应滑模控制进行仿真分析。然后、在Simulink仿真的基础上建立实物实验平台,利用Labview构建上位机根据推到得到的控制律驱动气动肌肉分别对传统滑模控制与神经网络自适应滑模控制进行实际实验。最后,比较引入神经网络前后的气动肌肉滑模控制系统的性能,得出结论。
第2章 气动肌肉滑模控制原理与仿真分析
2.1 气动肌肉及其三元素现象模型
气动肌肉最初是美国医生J.L.McKibben发明并推广用于驱动患者假肢。气动肌肉作为一种新型执行器,具有与生物肌肉相似的力学特性,因此非常适合作为康复机器人的驱动器。气动肌肉有着低价格、轻重量、高功率/重量比、高功率体积比、柔顺性好等优点。在康复领域有着广泛而光明的应用前景。然而由于气动肌肉具有很高的非线性和时变特性,因此在实际运用中很难对气动肌肉进行精确的控制。
研究人员考虑了许多因素来修正能量守恒导出的理想模型,例如橡胶管的厚度、气动肌肉的非圆柱形几何形状、末端的变形、橡胶弹性引起的径向压力损失、外层编织层弹性、纤维编织层摩擦等。因此,大多数气动肌肉模型都含有大量的参数,这就使气动肌肉的建模和应用变得比较复杂。
由于在理论模型中很难获得某些参数的精确值,Reynolds等提出的气动肌肉三元素现象模型[8]。三元素模型包括收缩元,弹力元和并联阻尼元。现象模型也被称作经验模型或参量模型。气动肌肉的三元素模型是根据气动肌肉的动力学特性开发的,由弹簧、阻尼等简单物理对象组成。Reynolds提出的现象模型,由弹簧,阻尼和收缩元并联组成,如图 2.1 所示。
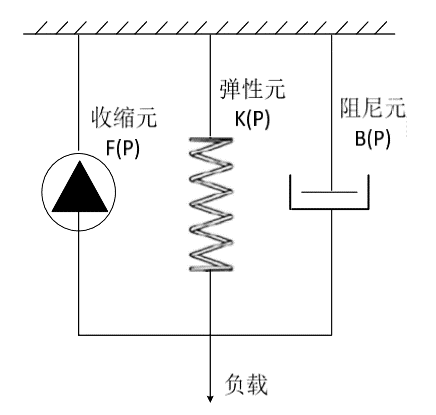
图 2.1 三元素现象模型
2.1.1 三元素建模实验
三元素现象模型表达式为:
(2.1)
(2.2)
(2.3)
(2.4)
(2.5)
(2.6)
其中 M是气动肌肉负载的质量,M=0时则表示气动肌肉处于空负载状态;g为重力加速度; P 代表气动肌肉内部相对气压。其中 K(P)代表气动肌肉三元素模型中的弹性元系数, K(P)对不同的气压范围具有不同的线性关系。B(P)代表阻尼元系数,考虑到阻力元系数B(P)在充气放气过程中表现出不同的特性,因此需要对其分别建模。F(P)是收缩元提供的有效力,单位为N。本文从相对压力为零时开始进行对气动肌肉进行模型辨识。
2.1.2 三元素参数测量结果
根据上一节提出的气动肌肉三元素模型,本节针对Festo商用气动肌肉进行三元素模型的参数测量。由于气压、位移传感器已经进行过标定,本节主要介绍三元素建模实验中三元素参数的获取流程。
基本实验步骤如下:
(1)测量气动肌肉收缩元的有效力F(P)以及弹力系数K(P)。根据公式2.1,当时,此时气动肌肉的静态模型可写为:
(2.7)
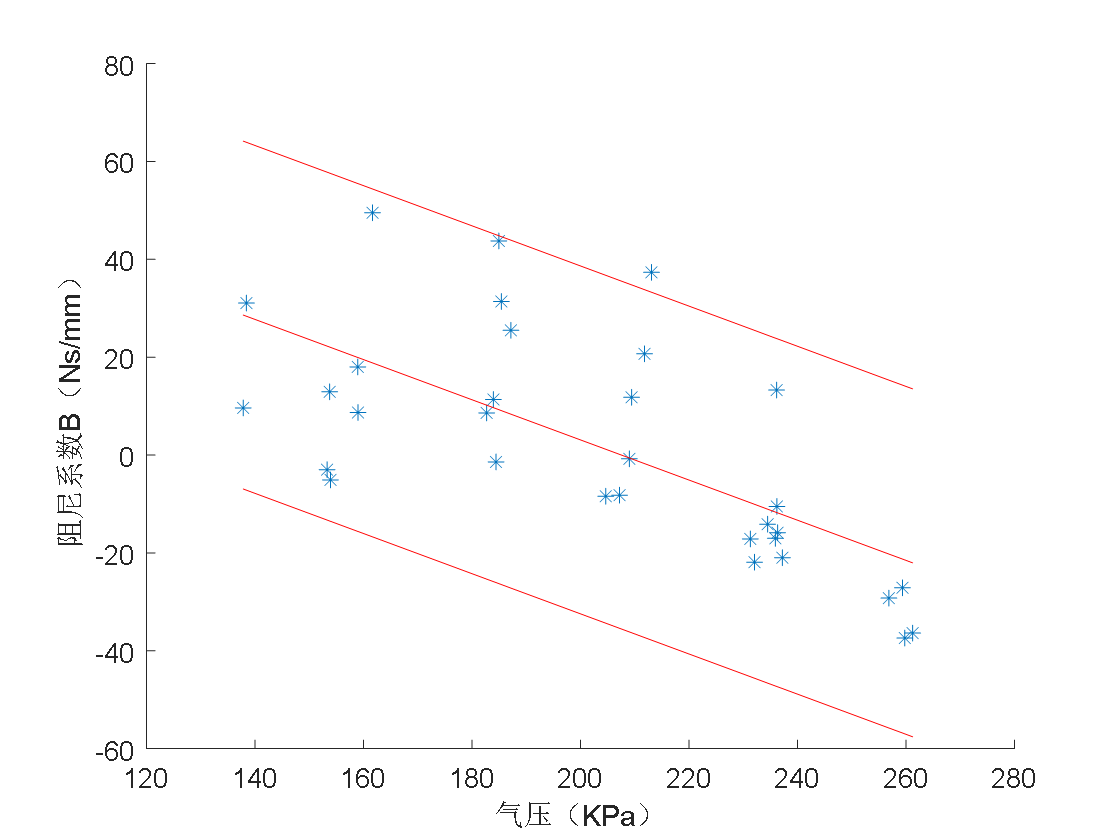
首先选择一个固定的负载,从0.5-5v以0.5v的步长调节电磁阀压力到达稳定后,每到达一个气压测量点,待气动肌肉稳定后,记录气动肌肉的位移和压强重复记录三次,取平均值。在1.5,3.5,5.5,7.5,9.5,11.5Kg的质量下分别对实验数据进行记录。处理数据时,将气压比例阀相同输入电压值的气动肌肉位移和负载质量代入等式(2.7)中,使用最小二乘法估计当前压力下的有效力系数F和弹性系数K。测量的结果如图 2.2所示,图中同种颜色的*号代表同样压强下测得的一组数据,压强从左到右压强逐渐增强。图 2.2 中各条直线是在同样的压强下拟合的结果,根据等式(2.7)可知直线的斜率大小为-K(P),经实验数据拟合的直线在 y轴的截距为F(P)的大小[17]。
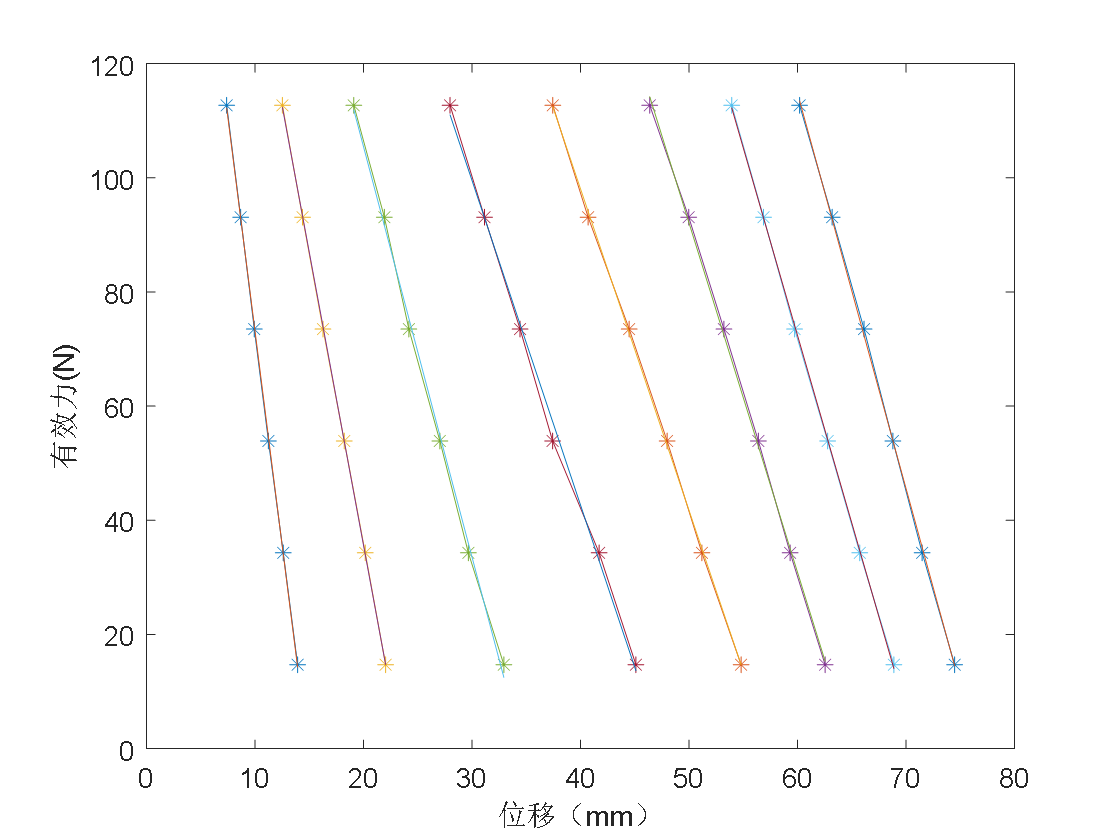
图2.2 根据实验数据拟合结果
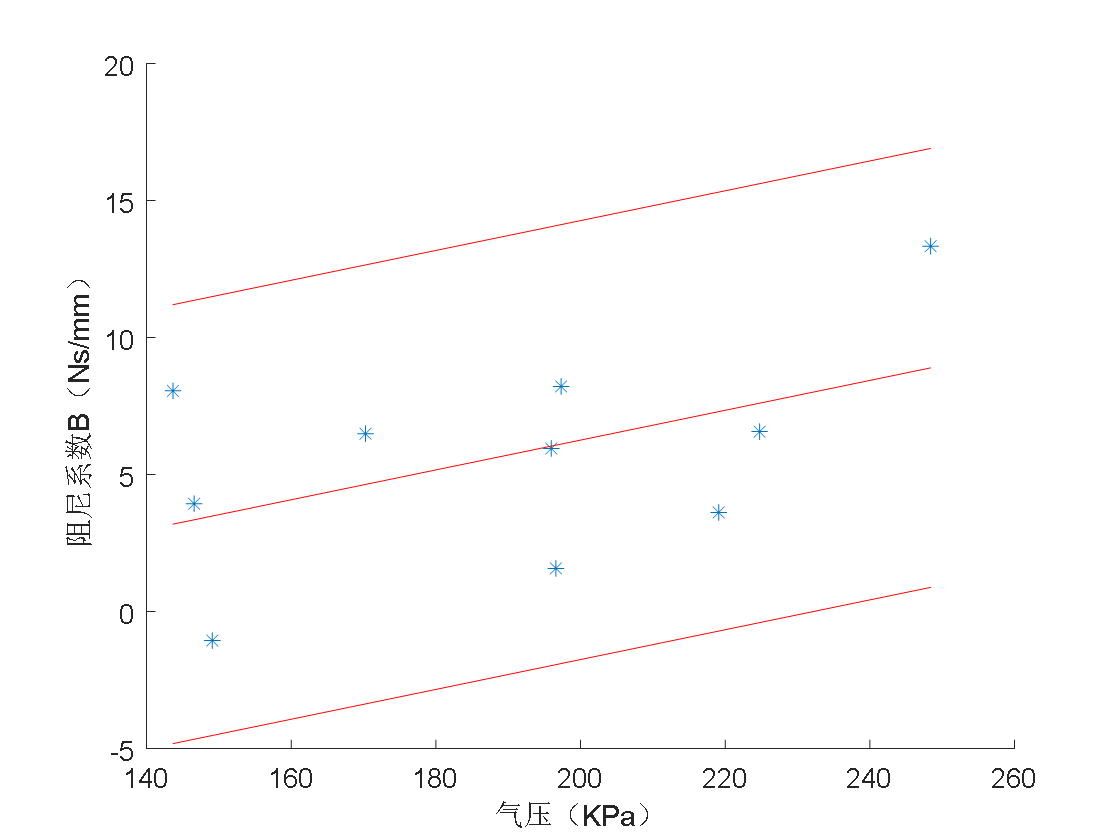
在得到不同压力下对应的有效力系数F和弹性系数K之后,根据F(P)和K(P)随压力变化的趋势,分别对其进行线性拟合获得关系式 F(P)及 K(P)。其中K(P)在不同气压范围内具有不同的线性关系,因此需要对K(P)进行分段线性拟合。实验数据拟合结果如图 2-3和图 2-4 所示。
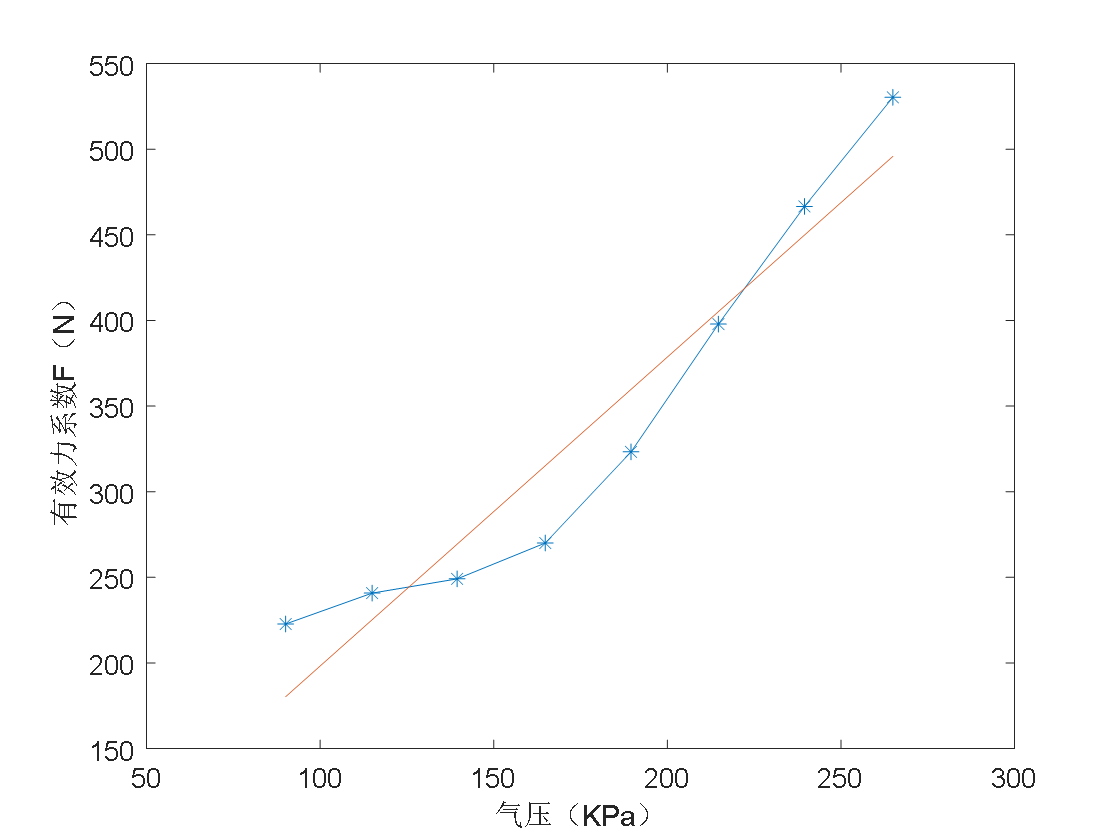
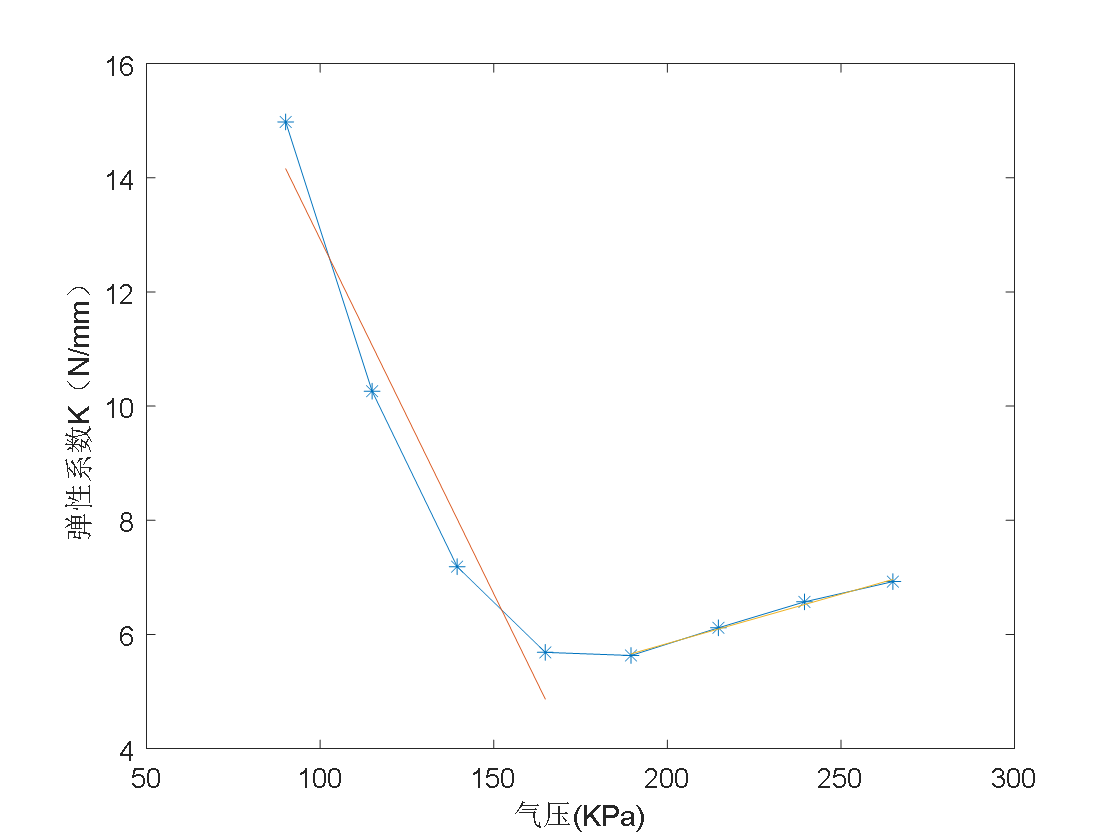
图2.3 有效力系数F和P的拟合结果 图2.4 弹性系数K和P的拟合结果
拟合结果表明,收缩元有效力系数F与气压P大致呈直线增长的关系,而弹力系数K则随着压力的变大呈现出先线性减小后经过转折点线性增加的分段线性关系。转折点出162.33Kpa附近,当压力低于转折点,弹性系数 K 随气压的增加而线性递减,而压力大于转折点,弹性系数K随气压的增加而线性递增。这一现象也符合了Klute气动肌肉理论模型的仿真结果[17]。
(3)测量气动肌肉阻尼系数 B(P)。
由上一步气动肌肉的静态实验,通过对实验数据的拟合得到了三元素模型中的有效力系数 F(P)及弹性参数 K(P),阻尼系数可通过等式2.1来计算。
由于气动肌肉的充气和放气具有不同的动态特性,因此,需要气动肌肉的充气和放气过程分别进行辨识实验。为了计算气动肌肉收缩情况下的阻尼系数,首先将气动肌肉充气达到一定的气压,待气动肌肉稳定后,突然移除气动肌肉部分负载(约原负载的1/3),这时气动肌肉相当于受到阶跃信号的作用,产生一个动态的收缩过程,将动态过程中获取的数据代入等式(2.1)中进行计算,式中 F(P)采用前一步骤中拟合的结果代入,可得到当前压力下的阻尼系数B(P)[17]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: