不同环境中实时Retinex的可见度增强外文翻译资料
2022-10-10 14:32:06
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
不同环境中实时Retinex的可见度增强
Bin-Na Yu, Byung-Sung Kim与Kwae-Hi Lee
韩国,首尔
韩国西江大学,工学院
电子工程系
摘要:本文为图像增强法的Retinex算法提出改进结构。该算法能在各种环境中,尤其是在恶劣天气和夜视情况下有效执行。尤其是,与其他方法相比,Retinex算法能显示优秀成果,此外在夜视情况下也有优点。但是,Retinex算法也有一些问题,例如光环效应和颜色失真。本文中,提出的算法有解决以上分别结合反射和亮度图像与一些常数因子问题的简单想法。因为结果包括亮度分量,因此可作用于不同环境,例如不仅模糊图像还有夜视图像。此外,本算法有实时处理的正确结构。多种图像结果表明本算法的有效性。
关键词:除雾,Retinex算法,图像增强
I.介绍
大气中水粒子形成的雾霾从物体和环境光中散射反射成分[1]。会造成提供差的可见性,并缩小图像的动态范围(DR)。最近,在监控和车载摄像头中,在图像中使用除雾(除雾)进行预处理,以提高可见性。除雾的目的是在恶劣环境中提供可见性增强并在高级驱动助手系统(ADAS)中为图像识别提供高质量分辨率[2]–[4]。
之前的除雾研究分为两类:图像复原和图像增强法。使用附加信息或实施前,图像复原法包括对象的固有亮度[5]–[11]。图像增强法使用例如无场景信息的人类视觉系统(HVS)增加动态范围并用雾霾对比图像模糊[12]–[19]。
在图像复原法研究开始时,单图法已经显示出非约束性问题,并需要其他场景信息与限制。为解决该问题,在21世纪初,使用多个图像或不同极化的其他信息[20]、深度地图、或关于同一场景的用户选择信息[21]进行研究。然而最近,单图法表明在单图中使用强大之前或特征假设时有显著效果[5]–[11]。
根据Tan的方法[8],在两种假设下,关注于复原图像的最大化局部对比。首先便是防雾图像比模糊图像对比度更高,第二点便是照相机与物体之间的距离造成的空气中光线的变化。尽管Tan的方法表明可见性得到提高,但是输出仍趋于饱和。这是因为由于修补程序操作在深度中止时发生光环效应,且数据成本函数使结果最佳。
在Fattal方法中[9],他建议根据以上假设获得反照率和传输,该假设包括表面着色和传输之间的局部最低关联。在有霾的情况下,Fattalrsquo;的研究显示自然结果。但是,由于申请以上假设困难,有物体或雾过度灰色固有颜色的场景结果不好。
根据他的方法[10],在这之前的黑暗通道为建议的清晰图像的统计分析用于估计传输。根据本研究,估计的传输地图就是深度图。因此,可以处理深度信息。他的方法在图像复原方法中表明模糊图像的最好结果。然而,他却用软抠图算法[22] 细化传输地图。抠图算法需要大量数据,以获得深度图不连续边缘的精确传输。因此,很难进行实施处理。
在Tarel的研究中[11],建议用中值滤波器估计传输。他认为雾度与RGB空间中的颜色最小值有关。根据假设,雾的颜色为白色。尽管,Tarel的方法可用于实施处理,但是仍有颜色失真和油画图像方面的问题。因为从多个场景中很难得出白色平衡的准确值。
尽管以上研究在部分场景中显示杰出的结果,但是在图像复原方法上使用通用模型[1]。该模型只考虑一个方向分量而光由雾的粒子进行分散,且当颗粒在雾霾中不密集时,具有有效限制。因此,以上工作仅适用于日间雾。
在图像增强研究中,对直方图均衡方法[12]与Retinex理论[13]–[19]进行研究。而使用柱状图,结果似乎更易受噪音影响且有两个问题。第一个问题是,当场景中一个物体的深度为动态时,除雾性能低;第二个问题是与图像复原算法比较时颜色失真。在Retinex算法中,与修复法相比,根据对场景的非模态和非约束,NASA建议提高航拍图像的可见性。Retinex算法在不同的光环境中显示更好的性能。
在独立环境中,尤其是日间和夜间视图情况下,本论文提出有效的除雾算法。本图像增强法在多种场景下比图像复原法性能更好,尤其是用Retinex算法。之前的Retinex算法专注于补偿消除由亮度造成的恶化对比,呈现包含对象特性的反射部件。
提出的Retinex结构中的想法不需消除亮度。该工作通过全局色调映射控制亮度并提高物体反射的相对对比,因此,该结果在除雾上自然且保持原始图像的色彩保真度。另外,本论文提出快速处理,使用积分图像估计亮度[23]。
在下一章中,本论文将对之前有关Retinex算法的研究进行检查。
II.相关工作:RETINEX
Retinex想法由Edwin Land作为一种亮度和人眼视觉的色觉模型构思出[24]。经实验证明的颜色具有不仅由反射光谱和环境决定的性能。也具有对决定物体反射性能重要的边缘特征。根据以上结果,Land提出一种颜色恒常性的计算理论。
随后作品[25]-[27]提出的概念,作为一个中心/环绕空间的对手操作,对非迭代形式有迭代随机游走计算。图1,Jobson等人[29]从定位对数函数与环境功能实验中得出优化的单尺度Retinex(SSR)结构,得出平方反比[25]、绝对值指数[26]、与高斯[27]。在形式上,SSR可以定义:
Ri (x, y)=log[Ii (x, y)]log[F(x, y)* Ii (x, y)], (1)
改为LOG比例
有高斯泡沫的LPF
改为LOG比例
调整
图1. 单尺度Retinex算法的框图[29]
其中:
在等式1和图1中,Ri表示表明估计反射图像的Retinex结果,而Ii为ith光谱带的图像分布,F为有高斯环绕空间常数C的高斯掩膜,且叫做卷积的数学运算由*号表示。通过调整Ri的表达范围,可获得输出图像R0。在等式2中,K由F(x,y)的双积分值决定。
Jobson等人还使用一种具有可变C的环绕函数比例证明SSR的还原和动态范围压缩(DRC)之间的取舍。公式1中使用的中心/环绕操作在实时处理和关键变量操作的难易程度上有优点。而估计照明用的低通滤镜(LPF)有光环效应。
为了补偿SSR的限制,Rahman和Jobson等人[17]提交多尺度Retinex(MSR),该尺度使用三个周围函数和MSR比例对图像照明进行估计,与SSR相比有更好的色调再现效果和更高的DRC效果。MRS算法公式为:
其中N为大量比例,omega;n为与第n个比例相关的重量。在公式3中,N和omega;n的经验值分别为3和1/3。
此外,还建议多尺度Retinex色彩还原(MSRCR)使用Retinex算法将灰色区域恢复为灰色,定义为:
其中:
在第i个带中,Ci表示颜色恢复功能,而alpha;和beta;分别为对比常数和平衡常数。在等式6中,S为光谱波道数量,一般S为3。不幸的是,它仍然很难决定Ci代表的alpha;和beta;的适当值。因此,MSR一般用于对MSRCR进行比较研究。
由于本文对之前的Retinex研究进行回顾,以下将确定MSR法的特征并对除雾的可见性增强限制进行讨论。MSR算法在很高程度上取决于环绕空间常数(比例)与规模重量的大小。Jobson [17]发现以上两个参数的相反值环绕空间常数为15/80/240,规模重量为1/3。
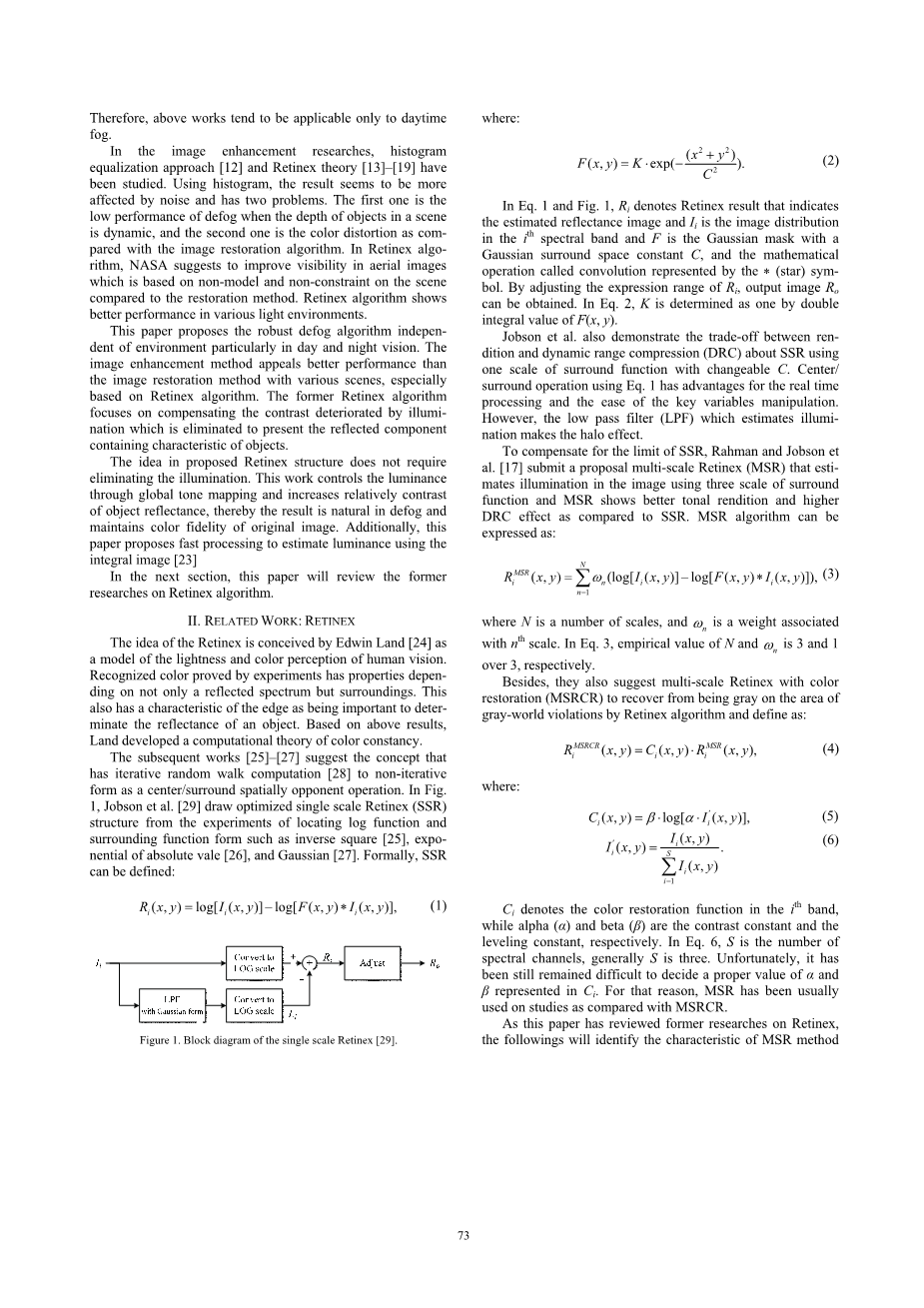
在图2中,尽管本文使用与以上空间常数相同的值(15/80/240),而实验结果通过重新调整图像大小显示不同的特征(2、1、0.5和0.25 次)。当图像大小比空间常数小时,图中的结果有色调和色彩还原问题。相反,当图像大小比空间常数相对较大时,在图像细节和DRC上有更好的结果。
通过以上研究结果,空间常数与空间常数的大小有关。通过公式2,环绕掩膜明显用以下空间常数表示:
标准偏差sigma;,则空间常数C和sigma;之间的关系可表示为C=。高斯掩膜的一半为标准偏差(sigma;)的三倍。因此,表示为:
其中,Msize为环绕掩膜的大小。此外,Msize可用最大函数表示为:
其中r为图像的标度常数,范围为零至一。最大操作从反射图像(R)和空间常数(C)之间选择最大值。因此,C表示如下:
图2.实验结果由r决定。(a)输入图。(b) 为(a)大小的四分之一。(c)为(a)大小的一半。 (d)等于 (a)的大小。(e)为 (a)大小的二倍。
公式9中,r确定为图8和图10的0.05/0.28/0.87 (%)比率。图2显示r决定的高清图像中空间常数为15/80/250的结果。图2(c)生动的突出其他结果,因为结果在颜色敏感度和DRC效果上结果都较好。
然而,以上确定的因数与一般亮度环境中图像有关。本文关注由雾或夜视退化的图像可视性增强。详细强调DRC和组件比图像色度和色彩还原更加重要。因此,模糊图像的r值需比普通图像的r值小。由于本图中的干扰且本文通过有关多个不同模糊图像证明0.03/0.1/0.3 (%)的比率适用于r,因此选择适当的r值比率很有必要。
如图1所示,因为反射图像范围无规范化分布,因此有必要调整环绕功能。两种典型的调整方法分别为Moore等人[26]和Jobson等人[29]提出的自动增益/抵消和规范增益/偏移法。不同的实验环境,例如雾或夜视,Jobson等人提出的通用方法很难用于提出的算法。反射图像具有波动分布范围,在通用方法中使用固定增益/抵消有限制。因此,Moore等人提出的自适应增益/抵消是通过反射图像的最低和最高值获得,为适用于推荐算法的更恰当的方法。
根据之前研究,由于LPF(空间高斯滤镜)用于猜测一般亮度组件,因此在图像强度值波动处观察光环效应和颜色失真。当本工作将0.03/ 0.1/0.3 (%)用作掩膜尺寸的比率时,局部对比表达良好并较好的去掉雾。但是,图像的整体色调和色彩还原不自然。
在下一节中,本文将提出Retinex算法的改进结构,以克服以往Retinex法的限制性能,并详述该法算法。
III.提出的方法
所提出的算法的目的是对由雾和夜视造成的图像退化进行可视性增强,并对实时处理制定恰当结构。本文对修改后的Retinex算法进行解释,不是根据物理模型制定的图像还原法,而是用于在多种照明环境中稳定执行的图像增强法。
正如本文所示,之前MSR法的中心/环绕操作的结果显示可是性增强的清晰表现。而在有不同强度值的边缘处观察此类光环效应。因此,在以下章节中,本文将分析光环效应和颜色失真的问题,并提出组成以上问题的改进Retinex算法。
A.改进Retinex 结构
之前的Retinex算法使用输入图像与对数标尺的估计照明获得反射图像。在此过程中,由于差异值增加,强度剧烈变化的边缘有光晕现象。
当照明由空间常数的大小形成时,观察到图3中的光晕现象很严重。此外,除有类似结果的边缘区域的差异值外,反射率为零。这种情况使图像变灰并造成图3(c)颜色保真度。相反,使用大规模的空间常数,光晕效应降低如图3(a)所示,且图像的颜色表达提高。然而,细节因素与DRC效果的降低使得结果很难除雾。因此,推荐的算法使用小范围的空间常数来保证可见性增强并在无颜色保真的情况下得出自然结果。
当通过去除低谐波扩大反射系数并降低照明效果时,观察到以上问题。因此,本推荐算法使用在反射组件中而不是消除照明中强调的方法。
根据表1的雾与照明,本文通过考虑反射率特性的分布与图像照明提出Retinex算法的改进和固有结构。为解释具体结构,本项工作分别组织了包括100张至500张模糊和清晰日间图像。表1在反射图像与照明图像之间得出分析结果。
在反射图像中,平均值根据日间和夜间的正负值得出,且居中直方图的分布为零。根据反射的最小、最大和平均值,本文证明模糊图像比清晰图像的对比度低。根据特征,对比和反射元素分布在模糊图像的零周围。因此,如图4所示,推荐方法的对数标尺的反射乘以正数的对比值扩大反射率的对比。IiN表示标准化输入图像,alpha;和beta;分别表示Ri和Li的适应恒定值。
图3.取决于空间常熟的大小。(a)空间常数大尺寸。(b)小尺寸。(c)很小的尺寸。
表1.图像特征统计
|
环境 |
||||
|
日间 |
夜间 |
|||
|
模糊 |
清楚 |
模糊 |
清楚 |
|
|
反射最大值 |
0.7234 |
0.9312 |
剩余内容已隐藏,支付完成后下载完整资料 资料编号:[151620],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
|



