基于Simulink自动驾驶工具箱的AEB系统设计与仿真毕业论文
2020-02-18 11:56:39
摘 要
在经济飞速发展推动社会进步的环境下,科技的创新促使汽车工业得到跳跃式的发展,但同时也带来了世界性的交通安全问题。传统的被动安全无法很好的避免交通事故的发生,因此主动安全的概念逐渐形成并不断的完善。
目前被视为汽车标准配置ADAS(高级驾驶辅助系统)技术将进入高速发展期,作为汽车高级辅助驾驶系统之一的AEB(自动紧急制动)系统,现已是汽车巨头们必要的竞争优势,还将对未来实现自动驾驶起着重要的技术支撑。
已有避撞系统的仿真研究大多是以结合一到几个软件进行建模、联合仿真的方式进行的,除了需要考虑仿真软件之间的兼容性,还要解决它们之间数据的接口、转换导入方面的问题,研究工作繁琐且困难。
本文针对AEB系统的设计与仿真,使用Matlab一个软件就可实现系统各个模块的建模和整体模型的搭建。采用传感器数据融合方法、应用基于安全时距原理的刹车控制策略,在可视化的模拟驾驶场景下,对Simulink自动驾驶工具箱现有的车辆动力学模型进行仿真试验,以曲线和鸟瞰图方式呈现的仿真结果表明,系统的设计满足了汽车前向防碰撞系统(AEB)的功能要求。
关键字:AEB系统建模仿真;Simulink自动驾驶工具箱;传感器数据融合;安全时距原理
Abstract
In the environment of rapid economic development and social progress, the innovation of science and technology has promoted the leap-forward development of automobile industry, but at the same time, it has also brought about worldwide traffic safety problems. Traditional passive safety can not avoid traffic accidents very well, so the concept of active safety is gradually formed and constantly improved.
At present, the technology of ADAS (Advanced Driving Assistance System), which is regarded as the standard configuration of automobiles, will enter a period of rapid development. As one of the advanced driving assistance systems, the AEB (Automatic Emergency Braking) system has become a necessary competitive advantage for automobile giants, and will also play an important technical support for the realization of automatic driving in the future.
Most of the existing simulation studies of collision avoidance systems are conducted by combining one or more software to model and simulate jointly. In addition to considering the compatibility between simulation software, it is also necessary to solve the problems of data interface, conversion and import between them. The research work is cumbersome and difficult.
In this paper, aiming at the design and Simulation of AEB system, using a software of matlab, we can realize the modeling of each module of the system and the building of the whole model. Using sensor data fusion method and braking control strategy based on safety time-distance principle, the existing vehicle dynamics model of Simulink autopilot toolbox is simulated in visual driving simulation scenario. The simulation results presented by curve and bird's-eye view show that the design of the system meets the functional requirements of AEB.
Key words: AEB System Modeling and Simulation;Automated Driving Toolbox;Sensor Data Fusion;Safety Time Distance Principle
目 录
第1章 绪论 1
1.1 研究目的及意义 1
1.2 国内外研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 3
1.3 课题设计内容 3
第2章 AEB系统的设计方案 4
2.1 软件工具简介 4
2.2 系统介绍 4
2.2.1 系统的功能 4
2.2.2 系统的组成 4
2.3 设计思路 5
第3章 车辆动力学模型 6
3.1 车辆动力学模型的简化 6
3.2控制力的计算 6
3.3控制的逻辑切换 7
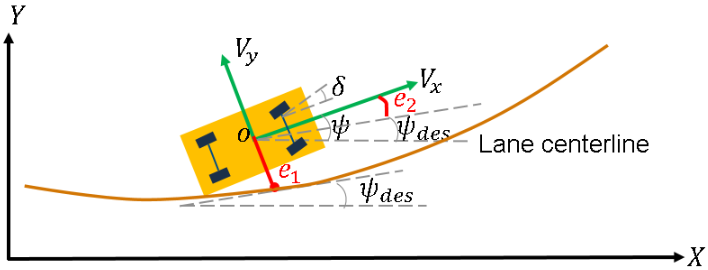
3.4 车辆的转向 8
第4章 AEB子系统的建模 10
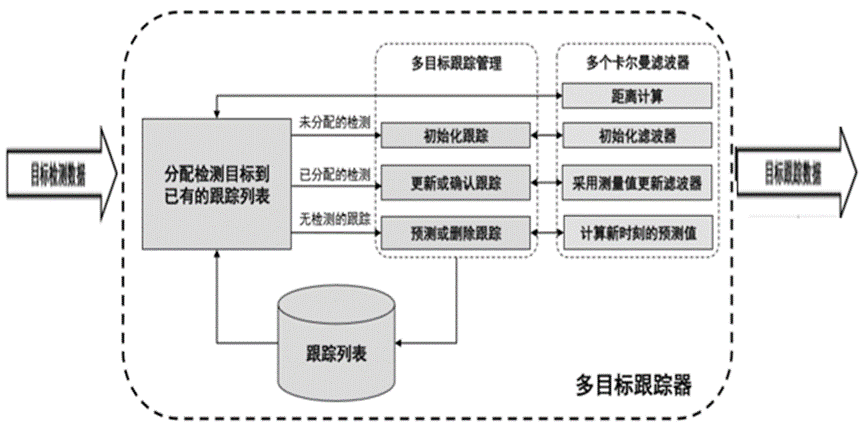
4.1传感器数据的融合 10
4.1.1 检测及数据融合原理 10
4.1.2 传感器数据融合建模 11
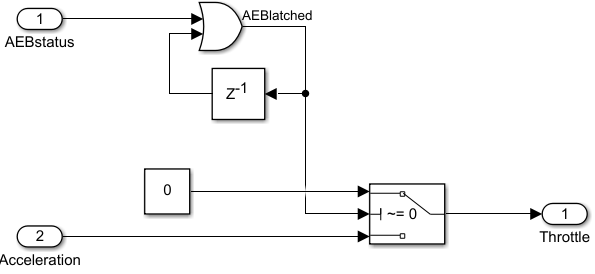
4.2 刹车控制器的建模 14
4.2.1 刹车控制方法及策略 14
4.2.2 控制器的建模 16
第5章 仿真分析 19
5.1 整体模型的搭建及参数设置 19
5.1.1 整体模型的搭建 19
5.1.2 参数设置 21
5.2 系统仿真及结果分析 22
5.2.1 系统仿真 22
5.2.2 结果分析 22
第6章 总结 27
参考文献 28
致 谢 29
第1章 绪论
1.1 研究目的及意义
在全球经济高速发展和人类生活质量不断提高的环境下,汽车工业的发展也随之迅速崛起,国内外各大汽车企业为适应国际化、多元化需求,积极开发,力求以高产品性能优势占据行业技术制高点。同时在汽车保有量的逐渐上升和道路水平发展背景下,汽车速度的提高和车流量的增长,由此带来的道路安全问题愈来愈严重。严峻的交通事故对生命财产造成的危害问题,使得人们更加重视提高汽车发展中的安全性能。尽管各国政府都加大了交通方面法律法规的出台量与执行力度,来减少道路安全事故的发生,自然安全技术也成为了世界各国针对汽车产业的发展战略目标。
交通事故的频发究其原因,对汽车安全性能存在影响的不外乎人-车辆-环境这三大因素。随着智能交通的出现,融合各学科的发展应势而生的各种汽车主动安全技术发展也越来越自动化、智能化。当然这些应归功于各国政府各汽车企业对汽车安全技术研究的多方面投入,使之不断的创新发展。从被动的安全技术(安全气囊、吸能车体、汽车黑匣子)发展到主动的安全技术(自动导行、车距自动报警、高驾驶操纵性系统),都起到了一定程度降低交通事故危害性的作用[[1]]。
对于安全方面的要求,我们希望产品主动安全的配置能达到最好,本文研究的汽车前向防碰撞系统(AEB)目的就是为了更大程度的减少交通事故造成的危害。且在主动安全方面,有一项可减少意外碰撞事故的技术已被证实有效,正得到越来越多的重视,即自动紧急制动系统(AEB),也就是我们常听到的预碰撞安全系统。汽车AEB系统是目前业内在汽车安全技术方面关注的重点,不断开展汽车防碰撞系统研究工作,其重要性不言而喻。
据美国国家安全委员会的调研资料显示,在已发生的交通安全事故案例中,因驾驶车辆人员注意力不集中、判断决策失误等驾驶失误行为而导致的就有70%~90%之多[[2]]。因此,若能在事故前能够有相应的安全预防措施,提高驾驶员的操作性能,将会很大程度的减少事故发生率,保证道路安全避免人员伤亡和财产安全。车辆制动便成了研究者们一大技术突破点,基于在遇到突发情况时很多驾驶人员来不及制动,就已经和前车发生碰撞的交通现状。此次研究的汽车前向防碰撞系统(AEB),正是可以在驾驶员分心时提醒驾驶员,在来不及刹车时能及时进行紧急制动。AEB系统通过综合外部环境(路况和车况),运用现代信息技术、传感技术等,扩展和提高驾驶人员的感知和反应能力。AEB系统通过检测和识别车辆前方物体,在存在危险障碍物情况下,通过预警提醒驾驶者进行制动操作以避开碰撞。若驾驶者仍无制动操作,系统判断出无法避免追尾碰撞,就会采取自动制动措施来减轻或避免碰撞。AEB系统还提供动态制动支持,当驾驶者踩下制动踏板的力量不足导致无法避免追尾碰撞时,及时补充停车所需制动力。
Euro NCAP和ANCAP分别为欧盟和澳大利亚第三方独立车辆安全认证机构,二者于2015年5月共同在《Accident Analysis amp; Prevention》期刊发表题为“现实世界追尾碰撞中AEB的有效性”的研究报告,结果显示:AEB技术能在现实世界中减少38%的追尾碰撞,且无论是在城市道路(限速60km/h)或郊区道路行驶的情况下,效果并无显著差别[[3]]。AEB系统能大大避免汽车发生正面碰撞的风险,对于减少交通事故的发生、提高道路行驶安全水平,进一步完善智能交通有着非常重要的实际应用意义。
1.2 国内外研究现状
1.2.1 国外研究现状
国外在汽车前向防碰撞系统(AEB)的研究和应用都比国内起步早,1957年便产生了自动紧急制动(AEB)系统的雏形,即应用于航空交通工具上的碰撞预警装置[[4]]。自1970年日本学者对汽车主动安全技术研究后,欧洲各国及美国也开始着手在主动系统的研究,但由于理论技术与硬件条件的限制,主动避撞安全系统的发展较为缓慢。20世纪80年代,各国科学家开始深入研究碰撞预警和自动紧急制动系统,前有划时代意义的德国奔驰公司发起的“Promtheus”计划,后有联合英国劳伦斯开发的基于毫米波测距防碰撞系统,研究都有了实质性的突破。随着计算机、电子等技术的进步,各大汽车企业开启自主研发,相继推出高实用性能产品,如奔驰公司率先发布碰撞预警系统,并于2003年在SCLASS车型中应用,其自动紧急制动系统最终在2006年问世[[5]]。
欧洲也在车辆安全保障技术有深入研究,欧洲开放基金( Pub-licly Funded) 研究主要集中在驾驶员的驾驶特性、传感器的环境感知、抬头显示、列队驾驶以及车车通讯等方面。欧洲委托基金(Commission Funding)正在支持纵向( Longitudinal)和侧向( Later-al)防撞研究[[6]]。
日本丰田汽车公司自1995年就研发出可实现被动安全和主动安全功能的AEB系统,利用毫米波雷达识别前向行驶信息,具有预警和自动紧急制动的功能。日本政府为减少碰撞的发生、减轻交通事故带来的伤害,宣布了关于“关于2世纪先进安全车”项目[[7]]。目前日本的5大汽车企业都自主开发出自己的主动安全系统,本田在2003年将带有自动制动功能的碰撞预警系统装备在其Inspire车 型上,被视为AEB应用的开端。并在 2010 年发布碰撞减轻制动系统(Collision Mitigation Brake System,CMBS),该系统是利用雷达传感器测距的 AEB 系统。
美国对AEB系统研究虽晚,但其政府对研究汽车主动安全技术与智能化驾驶技术大力投入,美国交通部开始计划与通用公司联合研究避撞系统,该系统既能防止前方碰撞,也能防止本车的后方被追尾碰撞。其无人驾驶汽车从 2012 年上路以来已累计行程 300 多万英里,具有代表性的如以AEB为核心系统的谷歌无人驾驶汽车,使得美国的汽车AEB技术领先世界[[8]]。
1.2.2 国内研究现状
与国外研究现状相比,我国在汽车AEB方面研究开始比较少,很少从主动防碰撞系统的探索中分出来进行单独研究,针对AEB系统对道路交通存在的安全潜力,在国家的支持下,国内很多研究所、企业高校的研究不断的深入并取得相应的进展。
中科院上海研究所2005年成功研发出24GHz的车载防碰撞毫米波雷达。清华大学侯德藻在主动防撞系统的研究中,建立的车辆动力模型、基于激光雷达进行实车试验等,为后续对自动紧急制动系统的研究提供更多的思路:如湖南大学李诗福联合仿真软件实现了系统的主动避撞,基于CarSim软件建立了车辆动力学模型,并在Simulink中建立了分层控制器;武汉理工大学蒋飞对主动避撞系统的安全距离模型、毫米波雷达数据处理的研究和探讨[[9]]。
部分车企也逐步走上自主研发的道路,在AEB方面的研究渐入创新佳境。2014 年,东风汽车有限公司也提出了一种在虚拟实时驾驶环境下基于视觉的前向碰撞预警系统(FCW)的开发方法[[10]]。同年吉利在鸟巢推出了国内首款配备AEB的博瑞GC9、上海通用在中国SAE年会中进行自主研发的自动驾驶演示车辆env20的展出[[11]]。
中国新车评价规程(C-NCAP)2018年版规则评价体系,将之前的车辆乘员被动安全保护性能评价拓展到对车辆主动预防安全性能。对此在汽车主动安全方面还需深入研究其仿真建模、控制方法等。
1.3 课题设计内容
由于仿真软件功能的局限性,导致已有AEB系统的建模过程繁琐复杂,或需要两个以上的软件工具才可完成仿真工作。但随着仿真工具的不断完善,汽车防碰撞系统的研究得到更全面的发展。
本文则是充分利用软件工具功能不断开发完善的特点,对汽车前向防碰撞系统(AEB)进行设计与仿真。将运用MATLAB/Simulink自动驾驶工具箱模块化的仿真模型,结合目前热门的毫米波雷达与视觉机器传感器数据融合的方法,在安全时距原理的基础上实现车辆的自动紧急刹车控制。
本文内容共分为五章,第二章主要介绍系统的设计方案;第三章建立车辆动力学模型;第四章叙述系统子系统的工作原理及其建模过程;第五章完成整合搭建出整体模型,并设置相关参数,分析仿真结果;第六章则是总结;列出本次设计参考文献以及最后致谢。
第2章 AEB系统的设计方案
2.1 软件工具简介
MATLAB已经不单单是一个数据计算的工具,随着它更多工具包的开发,目前已成为了一个集大成的开发平台。其在自动驾驶方面的应用也成了目前比较热门的话题,包含的技术领域五花八门。例如设计和测试视觉和激光雷达感知系统,以及传感器融合,路径规划和车辆控制器。可视化工具包括鸟瞰图和传感器覆盖范围,检测和轨迹,以及视频,激光雷达和地图的显示等等,包含算法、建模与仿真在内的功能不断地创新与完善。
2017年MathWorks推出的MATLAB/Simulink自动驾驶系统工具箱主要为加速自动驾驶及主动安全系统设计开发的工具,用于常见自动辅助驾驶、自动驾驶功能建模与仿真,可提供整合的包括感知、控制以及规划在内的,使用驾驶场景进行闭环仿真的仿真环境,同时软件本身可提供传感器融合算法的开发环境以及现成的融合算法和可视化功能。自动驾驶工具箱提供常见ADAS和自动驾驶功能的参考应用示例,包括FCW,AEB,ACC,LKA和停车服务员。该工具箱支持C / C 代码生成,用于快速原型设计和HIL测试,支持传感器融合,跟踪,路径规划和车辆控制器算法。
Simulink自动驾驶工具箱所提供的仿真环境是实现系统的基础,除了需要熟悉仿真工具之外,分析AEB系统在驾驶过程中所起的作用及其组成,更是系统方案设计的关键所在。
2.2 系统介绍
2.2.1 系统的功能
汽车前向防碰撞系统(AEB)顾名思义,是研究运行状态下车辆的前方状况的如何采集,非安全状态情况下如何防止碰撞追尾的问题。
首先系统需要实现的功能是在行驶过程中,对车辆前向环境进行实时的检测,若车辆前方出现障碍物(如车辆、行人等)时,能够及时的判断车辆当前的状态。若存在与障碍物体碰撞的危险则发出预碰撞信号,即起到提醒驾驶员采取刹车操作的预警功能。若驾驶员没有及时反应未对车辆采取刹车措施,此时系统进行自动的紧急刹车及时进行刹车控制即起到自动制动功能。如果车辆不存在碰撞危险,则车辆保持驾驶员设定的车速行驶。
总的来说,AEB系统不仅能够起到感知,还可对车辆起到决策和控制的作用。
2.2.2 系统的组成
根据本次研究的汽车前向防碰撞系统(AEB)的特征,将其组成分为包括测距模块、控制模块和制动模块的三大模块。
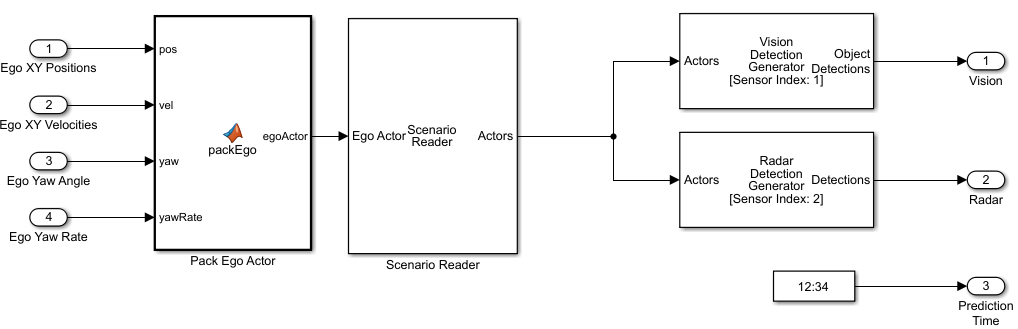
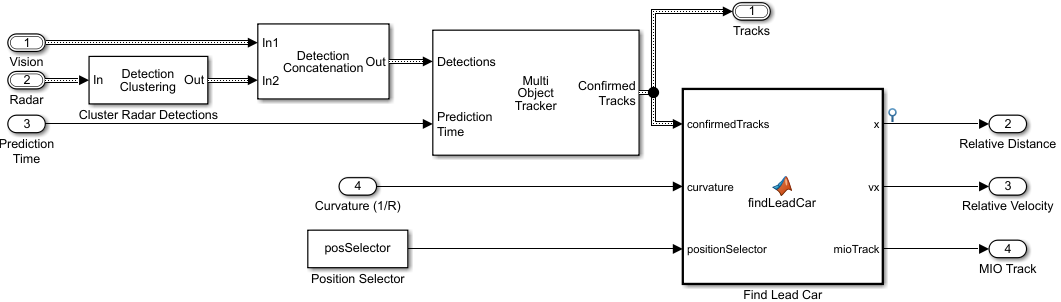
测距模块透过传感器如测距雷达侦测前方障碍物的相对距离与相对速度,并以影像模块进行信息融合;
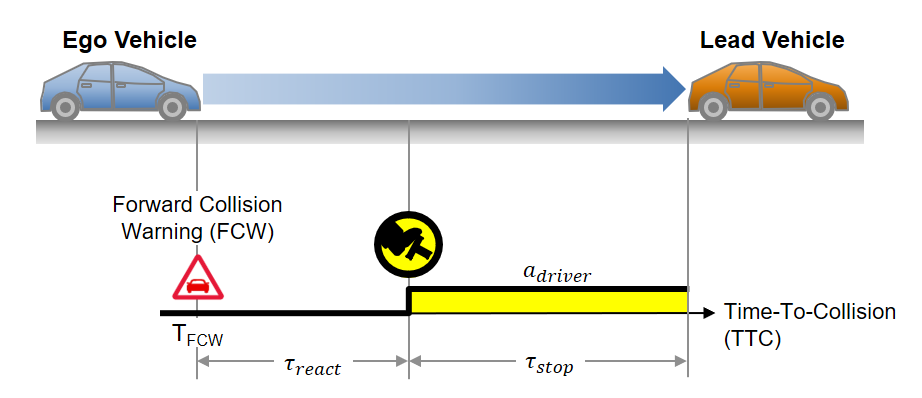
控制模块结合上述两种传感器资料处理结果,通过安全时距原理控制策略分析出与前方车辆之间安全距离下的预碰撞时间,用以判断是否有发生碰撞的危险;
制动模块根据控制策略对车辆状态的判别信息,若存在碰撞则视情形提供警示甚至自动启动刹车。
2.3 设计思路
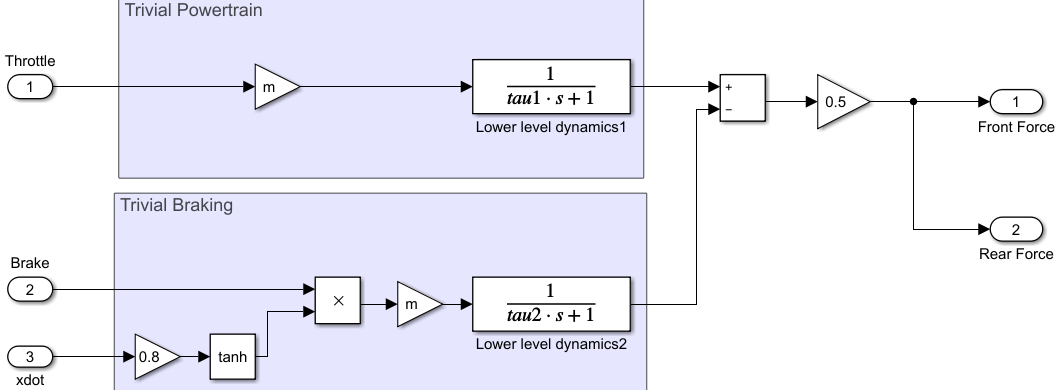
由汽车前向防碰撞系统(AEB)功能的实现要求,得出系统设计思路:在MATLAB/Simulink软件自动驾驶工具箱所能提供的车辆动力学模型,并在其提供的模拟驾驶场景下,采用传感器数据融合、安全时距原理策略的控制方法,进行整个系统的仿真和参数设置,图2.1为汽车前向防碰撞系统(AEB)实现框图。
本次设计完成车辆从感知到决策、控制到执行刹车的工作流程,关键在于对不同传感器采集到的信息进行融合,得到一个离车辆最近的跟踪物体目标;根据收集到的车辆前向物体实时距离、速度,基于安全时距原理控制策略计算出控制器的预碰撞时间、制动减速度等;最后需要对系统的控制对象车辆动力学模型进行建模,设置相应的参数并在模拟的驾驶场景下,验证系统功能的实现效果。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: