基于UWB技术的跟随行李箱系统设计毕业论文
2020-02-18 11:54:02
摘 要
随着经济的发展,跟随行李箱已逐步走进人们的生活,为人们出行带来了便利。本文针对行李箱跟随的问题,采用UWB定位技术和超声波避障模块对目标进行定位和障碍检测,使用微控制器控制轮毂电机实现对目标跟随。
本文以行李箱跟随设计为研究对象,首先从系统的实际需要出发,确定整体设计思路,并对主要器件进行选型,随后研究了UWB定位技术,对行李箱运动模型进行设计,根据模型具体讨论了本次设计所用TOA算法的原理与解算过程,阐明了行李箱跟随的原理。接着对系统进行模块化处理,对主控板、驱动电路、定位模块等主要电路模块进行硬件设计分析,然后再根据硬件的分层分别进行软件设计。
最后对系统TOA算法模型、电机驱动模型进行了仿真实验,模拟了对算法解算后驱动电机模块的过程。
关键词:UWB技术,定位,目标跟随,行李箱
Abstract
With the development of the economy, following the suitcase has gradually entered people's lives, bringing convenience to people's travel. In this bachelor thesis, UWB positioning technology and ultrasonic obstacle avoidance module are used to locate and detect obstacles for the problem of trunk following. The micro controller is used to control the hub motor to achieve target tracking.
In this bachelor thesis, the luggage following design is the research object. Firstly, based on the actual needs of the system, the overall design idea is determined, and the main components are selected. Then the UWB positioning technology is studied, and the trunk movement model is designed. The principle and solution process of the TOA algorithm used in this design clarify the principle of luggage following.Then the system is modularized, and the main circuit modules such as the main control board, the driving circuit and the positioning module are analyzed and analyzed by hardware, and then the software design is separately performed according to the layering of the hardware.
Finally, the simulation experiment of the system TOA algorithm model and motor drive model is carried out, and the process of driving the motor module after the algorithm is solved is simulated.
Keywords: UWB technology, positioning, target following, suitcase
目录
摘要 I
Abstract II
第1章 绪论 1
1.1研究背景及意义 1
1.2 UWB发展现状 2
1.3 跟随行李箱国内外研究现状 2
1.3.1 国外跟随行李箱研究现状 2
1.3.2 国内跟随行李箱研究现状 3
第2章 跟随行李箱总体方案设计 4
2.1 需求分析 4
2.2 系统总体规划 4
2.3 UWB测距技术 7
2.4 UWB定位方法 8
2.4.1 常用定位方法 8
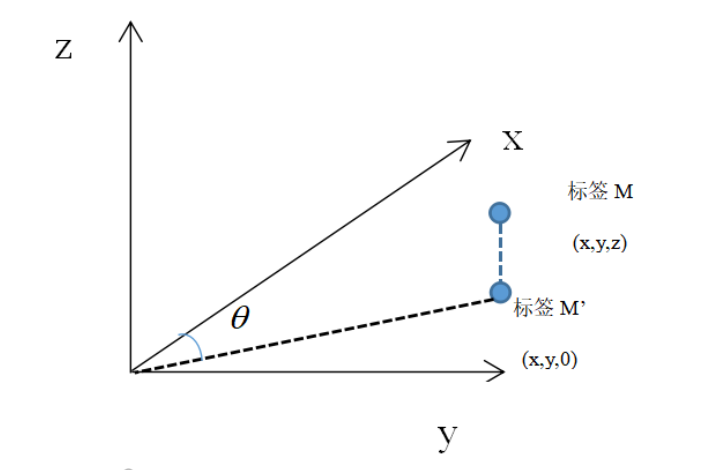
2.4.1 跟随目标定位方法 11
2.5 目标跟随原理 13
第3章硬件设计 15
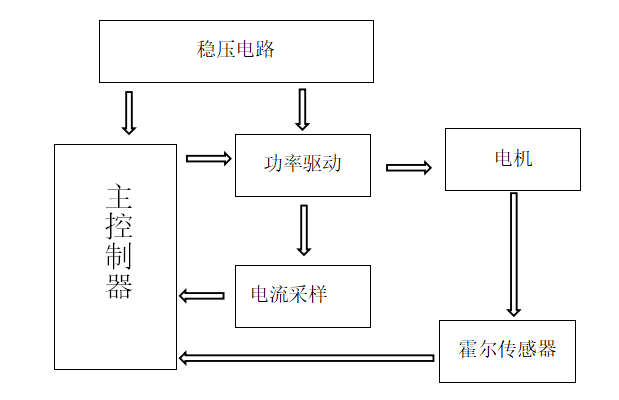
3.1电机驱动模块设计 15
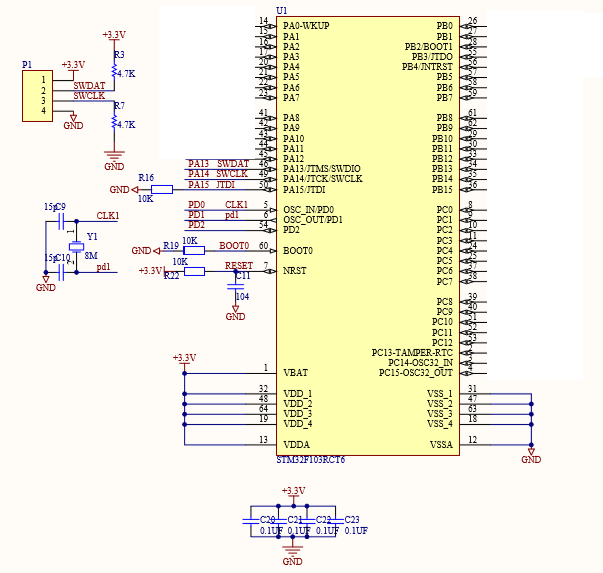
3.1.1主控制器电路 16
3.1.2 稳压电路 16
3.1.3 功率驱动电路 17
3.1.4 电流采样电路 19
3.1.5 霍尔传感器 18
3.2 UWB定位模块 19
3.3避障模块 21
第4章软件设计 22
4.1系统软件总体框架 22
4.2 UWB串口数据读取 23
4.3 电机驱动模块软件设计 24
4.3.1 定位算法的解算 25
4.3.2 PID控制 26
4.4本章小结 27
第5章 系统仿真 28
5.1 算法仿真 28
5.2 电机模块仿真 29
第6章 总结 31
致谢 32
参考文献 33
第1章 绪论
1.1研究背景及意义
随着社会科技的不断发展,各种以解放人类劳动力为目标的自动化设备大量走进人们的视野,自动化技术在人类生活的各方面开始逐渐占据主导地位,越来越多的自动化设备取代了之前的手工设备,变更了人们原有的生活理念,迎来了工业化的时代。在旅游业交通运输业高速发展的当今时代,行李箱的使用量是一个相当庞大的数字,但是有时厚重的行李箱会让人腾不开手而造成不必要的麻烦,这也意味着能够解放双手的智能化行李箱有着可观的市场,由此能够适应多元化需求,解放双手的智能行李箱开始逐步走进人们的视野中,随着经济科技水平的不断发展,行李箱自动跟随日益成为行业发展趋势。
要实现行李箱的自动跟随技术,需要系统通过相关技术手段能够检测到目标位置并进行跟随,考虑到行李箱跟随技术问题,包括距离干扰等影响,定位技术的选择也显得尤为重要。在现阶段应用较广的定位技术有 GPS、WIFI、RFID、超声波、蓝牙 和红外等。
GPS作为当前使用最广泛的定位技术在各类应用方面都已经达到了很成熟的地步。在GPS卫星全球覆盖的情况下,GPS定位有着定位全球化,精度高的优点。但是由于卫星信号是直线传输,穿透墙体效果较差,在室内定位领域适用性不强。蓝牙定位技术常应用于短距离通信,且其功耗低,可使用年限相对较长,但是由于该技术是根据目标所发射出的设备信号的功率大小来进行定位,在设备所处空间环境存在干扰,噪声信号干扰大的情况下,蓝牙定位系统的缺陷便暴露无疑。红外线定位技术由于红外线的特性易被障碍物遮挡吸收,只在空旷的地方精度较高,但由于其对于传感器要求高,受干扰程度也较其他定位技术大,红外线定位技术大多只用于高等级的军事领域。无线局域网络的WIFI收发器只能覆盖较小范围,易受环境中其它信号的干扰,局限了该定位方法只能在用于短途,且在抗干扰方面表现一般,定位器能耗也较高,只适用于个体使用。超声波定位由于收发模式使得其精度比较高,但超声波在传输过程容易收到障碍物的影响,被反射或者吸收,受多径效应影响大。
通过对比,UWB定位技术在抗多径干扰和障碍穿透能力的突出表现,使得其在室内定位、目标跟随等方面有了良好的应用。此外UWB技术在无线通讯方面和其他传统短距离无线通信方式相比,UWB以其传输时间短、传输距离远、频带宽的特性开始备受业界关注。
本课题为行李箱跟随系统设计,包括跟随避障等实用功能更好为人们服务,因此对于定位技术的选择上尤为关键,该跟随系统在距离精度等方面的要求很高,另外由于UWB通信保密度高的优点,标签的ID被唯一识别并跟随,行李箱系统不会出现跟随错误标签的情况,所以系统的定位选择为UWB技术,整个系统将讨论基于UWB定位技术的行李箱跟随系统的设计。
1.2 UWB发展现状
UWB是一种无载波通信技术,利用纳秒至微秒级的非正弦波窄脉冲传输数据。通过在较宽的频谱上传送极低功率的信号,UWB能在10米左右的范围内实现数百Mbit/s至数Gbit/s的数据传输速率。UWB技术逐渐在无线通信技术领域异军突起,被广泛用于静止或移动的目标的定位跟踪。作为一种新型通信技术,由于其在多径干扰,高速穿透,定位精度高,低成本和低功耗等方面的优势而备受瞩目。
2006年,已经有多家公司可以提供UWB芯片,例如Alereon、Staccato、Wisair、Intel、英飞凌等均有各自的UWB芯片解决方案,包括基带芯片、MAC芯片、RF收发芯片、或集成基带、MAC和RF的芯片。同时,很多芯片公司均公布在2007年将推出符合WiMedia认证的UWB芯片,并将拓展UWB应用在消费电子类产品中。
但是UWB目前也存在几大缺点,首先UWB通信层面上存在不足,主要是由于UWB系统占用的带宽很高,所以和很多其他的无线通信系统频段重叠,与其他通信系统的共存和兼容成为问题。UWB系统难以确定和其他通讯方式兼容而又互不影响干扰的度,而且在频段使用上也处处受限。在另一方面由于UWB系统的工作原理是发射窄脉冲,持续时间短但是脉冲峰峰值很大,瞬间产生的电子脉冲可能对含有精密的信号接收器、电子仪器电路的正常工作产生影响。
UWB的发展中存在着的频率管制、标准化等缺点与难题亟待解决,不仅如此UWB技术还必须面对其他无线技术的竞争。但是尽管如此UWB在应用方面仍然在朝前进步,通信技术在不断发展完善,精确定位技术定位算法也在不断改进,UWB在在定位技术领域崭露头角这是一个良好的开端。相信不久超宽带定位技术就可以完全实现商业化,精确的超宽带定位系统将会得到广泛应用。
1.3 跟随行李箱国内外研究现状
1.3.1 国外跟随行李箱研究现状
在消费升级的大环境下,2015年Blue Smart公司察觉出智能行李箱未来前景十足,率先进军智能行李箱行业,也一举成为行业领先者。随后在2016年Raden公司也开始智能行李箱的研究。在当时看来,这是对以往一成不变的行李箱行业的一次颠覆。2017年Blue Smart公司就推出了集GPS、充电、称重、远程控锁和社交等功能于一身的智能行李箱,虽然缺点不少如GPS时断时续、行李箱自动上锁功能bug频发,但是市场销售形势可见一斑。调研机构 Knowledge Sourcing Intelligence 的一份报告显示,2017 年全球智能行李箱市场规模达到 7.45 亿美元,预计到 2022 年会扩大到接近 20 亿美元。就连新秀丽(Samsonite)和日默瓦(Rimowa)这种传统选手,也感受到压力开始探索行李箱智能化。然而2017 年 12 月,出于安全考虑,美国几家主要航空公司出台禁令,禁止不可拆卸锂电池的智能行李箱托运或登机,这给智能行李箱行业带来较大的打击,18年5月1日,Blue Smart 在网站首页宣布停止运营,并将技术、设计和知识产权等出售给行李箱品牌 Travelpro。之后的5 月17 日,Raden 也宣布结业。航空公司的禁令严重影响他们产品的实用性、对消费者的价值、业务表现以及持续运营能力。智能行李箱行业一度止步不前,但是尽管打击不断,行业潜在的市场也激发了更多的从业者去完善改进,目前整个行业都在调整产品中锂电池的安装和拆卸方式来试图解决航空公司的禁令问题,国外的从业者也在努力将技术、实用价值和时尚的工业设计整合到一个行李箱上面。
1.3.2 国内跟随行李箱研究现状
不同于国外的惨淡,国内的智能行李箱行业正在蓬勃兴起。对于国内而言,智能行李箱还处于一个较为新鲜的时期,酷哇(COWAROBOT)、爱尔威(AIRWHEEL)、Alloy 、小米等公司所研发的智能行李箱已经在市场上发售。
COWAROBOT Rover行李箱采用手环跟踪设计,行李箱会随着手环定位来实现自动行走功能,并能轻松绕开路障和做爬坡动作,实用性非常出色。行李箱采用PC材料打造,结构强度有保障。内置锂电池容量也符合民航局规定的电池产品不超过160Wh的限制。此外它还融合了机器视觉AI技术,具备手环报警、体感交互等多种功能。
国内跟随行李箱从2016年的ASIA CES展上开始逐渐进入人们视野中,到近几年各种概念智能跟随旅行箱的问世,再到智能行李箱初步发售,国内的从业者吸取了国外的经验,智能行李箱的理念不断的开发完善,适应各种要求,该项目在国内正处于新生阶段,未来存在着无限的前景。
第2章 跟随行李箱总体方案设计
2.1 需求分析
智能行李箱系统旨解放用户双手以及具有强大的适用性,尽可能适应各种场合,满足客户的各种需求,该行李箱必须满足几个必要的基本条件:
(1)箱体具备一定的负重能力。
(2)精确识别并跟随目标。
(3)具备一定驱动能力适应于坡度不高的地面。
(4)具备一定避障转弯能力。
(5)拥有一定续航能力。
(6)可附加实用性基础能力如充电、测重等。
为满足上述设计需求,下面对系统整体进行规划与设计。
2.2 系统总体规划
基于对本次设计需求的分析,行李箱跟随系统应该包括行李箱箱体、UWB定位模块基站和标签、主控制器模块、驱动模块、避障模块、驱动轮、万向轮、电源等组成。
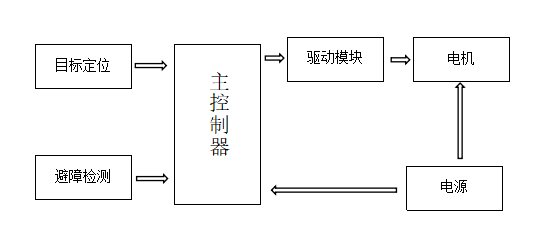 图2.1 系统总体方框图
图2.1 系统总体方框图
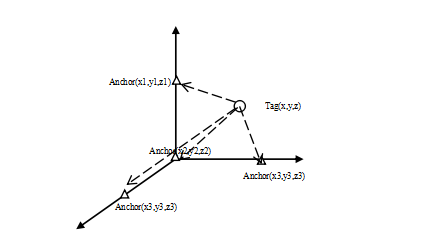
系统总体方框图如图2.1所示。设计主要完成三大任务,定位、避障、跟随,首先由定位模块进行定位,模块使用四基站一标签的定位方式。主控制器接收到目标位置信息后,结合避障模块传输的有无障碍的信息,发送控制信号对电机进行驱动,实现跟随目标的功能。
了解整体设计大致原理后需要对各个元器件进行选型与安装,安装点需要选在合适的位置,下面对各个部分的安装位置分别进行讨论:
- UWB定位模块,系统中模块包括四个基站与一个标签,三维定位只需要四个基站即可,当然基站越多精度越高,而相应算法要求也相应越严格。标签附着在目标人员身上,四个基站要固定在行李箱上。基站的安装既要能进行定位,基站间也不能相互干扰,安装设计如图2.2:
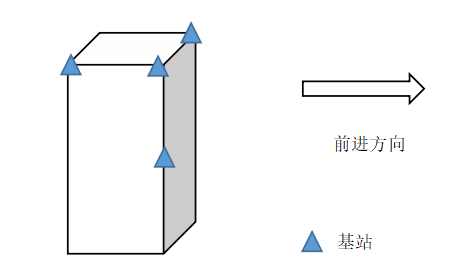
图2.2 基站的安装
安装没有采用将四个基站放置在同一平面的设计,具体原因将在后文中介绍。
- 车轮的安装
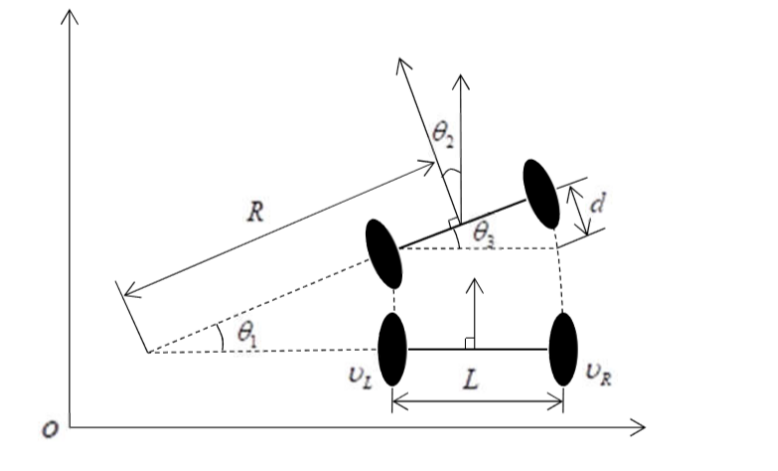
车轮包括驱动轮和从动轮,为了行进便利,设置前轮为驱动轮,后轮为从动轮,驱动轮由主控板驱动电机进行控制,从动轮只起导向作用。一般驱动轮结构为马达和车轮的组合,机械结构比较麻烦,安装在行李箱中会占用不必要的空间,因此采用结构简单的轮毂电机。轮毂电机是将传统驱动轮方式整合起来,电机车轮一体化的结构节省了行李箱空间。其安装设计如图2.3:
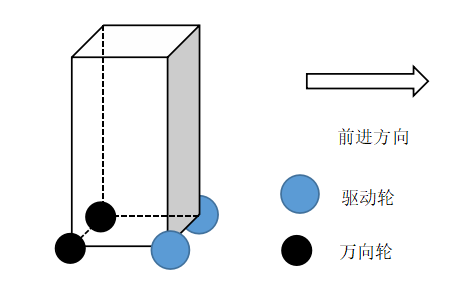
图2.3 车轮的安装
- 整体设计安装
行李箱系统还包括避障传感器模块、电源、主控制器等部分,在考虑到空间可行性以及整体布局上,整体安装如图2.4所示:
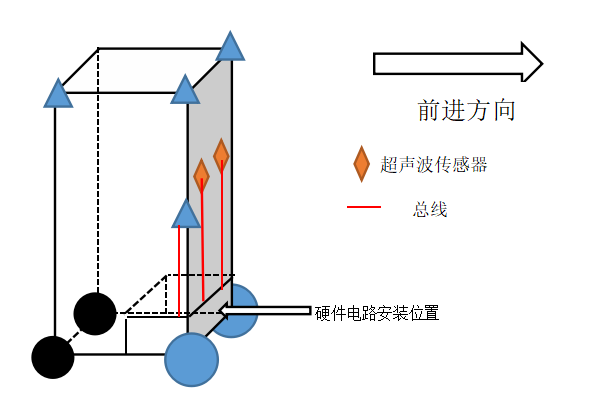
图2.4 整体安装
硬件电路部分安装在箱体底部降低重心安全性更好,基站和传感器通过总线连接至底部的主控芯片上,传输信息做后续处理,电池部分也放置在箱体底部,电池使用的是36v的锂电池作为总电源。整体布线简单,布局合理可靠。
2.3 UWB测距技术
传统的测距技术包括双向测距技术( Two Way Ranging )和单向测距技术( One Way Ranging) 。UWB常用的测距方法为双向测距信号飞行时间法TOF(Time Of Flight), 利用信号在两个收发机之间往返的飞行时间来测量节点间的距离。TOF法具有两种测距方式,单边双向测距(Single-sided Two-way Ranging)和双边双向测距(Double-sided Two-way Ranging)。
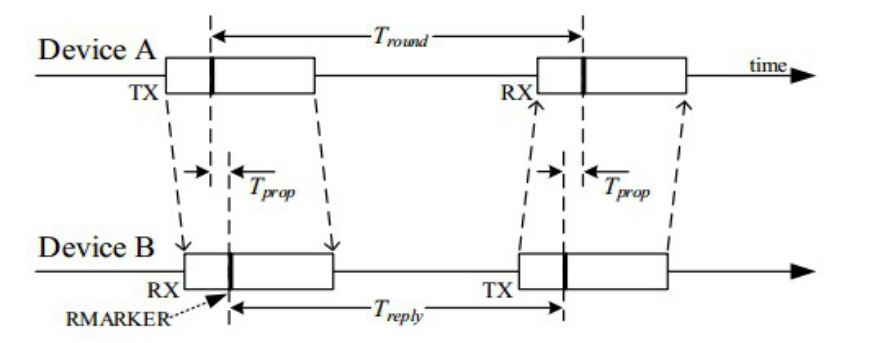
图2.5 单边双向测距原理图
单边双向测距原理如图2.5所示,设备A(Device A)发送(TX)数据,同时记录发送时间戳,设备B(Device B)接收到之后记录接收时间戳;延时Treply之后,设备B发送数据,同时记录发送时间戳,设备A接收数据,同时记录接收时间戳。由此可以得到两个时间差数据,从设备A发射信号起到接受到信号的时间点止的时间差Tround和设备B接受到信号到下一次发射信号的时间差Treply。最终得到无线信号的飞行时间Tprop:
 (2.1)
(2.1)
然而单侧双向测距只是对单个信号往返时间上的简单测量,由上式给出的时间差都是基于本地的时钟计算得到的,本地时钟误差可以抵消,但是不同设备之间会存在微小的时钟偏移,这就会产生测距误差,误差值与两设备时钟偏移误差的差值成正比。在实际应用中单侧双向测距法只对于精度要求不是很高,测距时间短的系统中比较适用。对于远距离高精度的测距中由于其误差较大将不再适用。为了减小测距误差我们扩展了单边双向测距方法使用双边双向测距法进行测距。
双边双向测距原理如图2.6所示,多测量一次往返时间差,由两次往返的时间戳,最后得到飞行时间,虽然增加了响应的时间,但会降低测距误差。
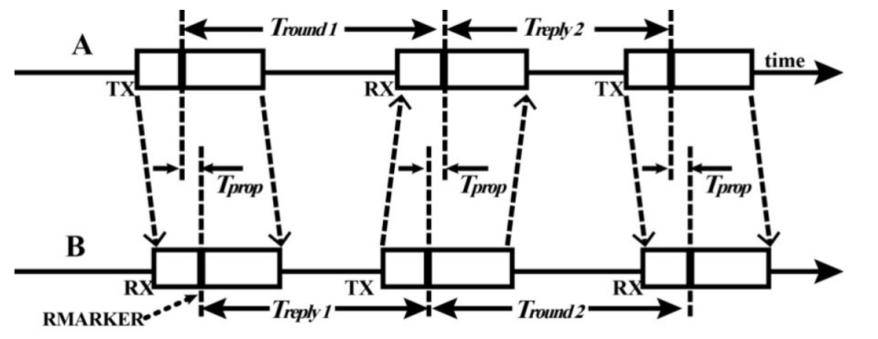
图2.6 双边双向测距
得到无线信号的飞行时间Tprop:
 (2.2)
(2.2)
最终需要求得的两个设备之间的距离则是所运算得到的信号飞行时间与无线电速度即与光速的乘积。
2.4 UWB定位方法
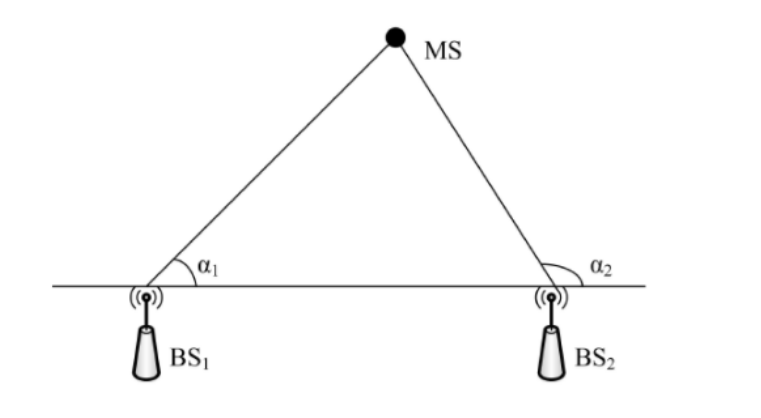
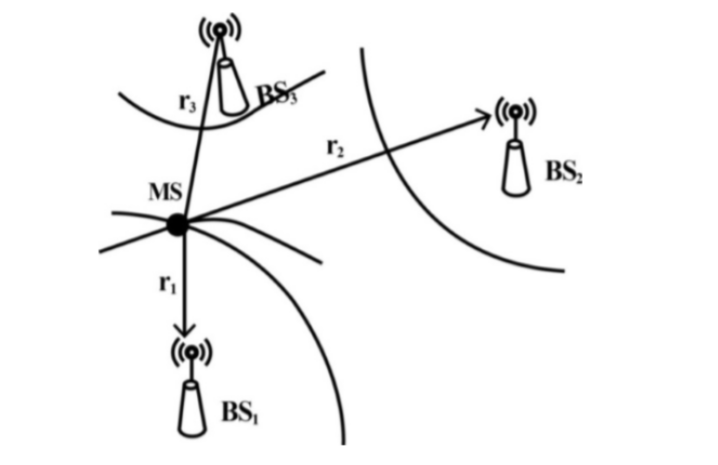
无线定位测量方法是指通过处理接收到的无线电波信号如二维三维坐标;经度;纬度;高度等特征参数,根据特定算法计算被测对象位置的方法。根据传输信号特征参数的不同,定位方法可分为AOA(Angle of Arrival)到达角度法、TOA(Time of Arrival)到达时间法、TDOA(Time Difference of Arrival)到达时间差法、RSS(Received Signal Strength)接收信号强度定位法等。
2.4.1 常用定位方法
- TOA到达时间法。该方法是通过未知节点和通信节点间无线信号的发射和接收,根据自身时钟得出信号飞行时间再算出未知节点与通信节点间物理距离的一种方法。在系统定位方法中通过多个距离的测定,利用几何或者空间关系得出待测节点的相对位置。其原理图如图2.7。
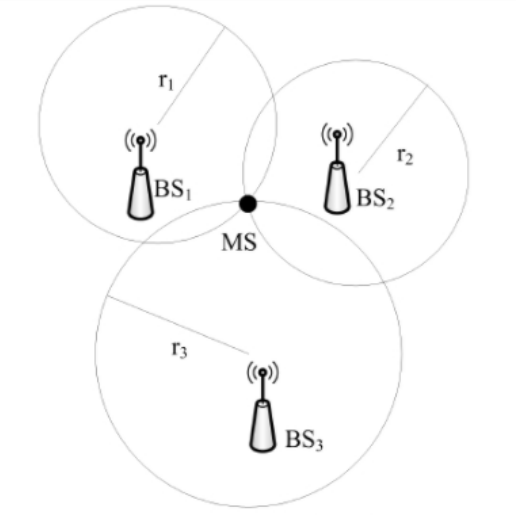
图2.7 TOA原理图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: