基于滑模变结构的航天器近距离交会对接控制毕业论文
2020-04-15 21:01:05
摘 要
近十几年来,航天器近距离交会对接技术已越来越有着不可代替的作用,其应用领域十分广泛,比如在空间产品的回收、燃料加注、航天器物资补充以及非合作航天器拦截等方面都有涉及。因此,要使航天技术得到更进一步的发展,解决近距离交会对接控制这一问题就势在必行。
本文首先介绍课题要用到的相关坐标系,接着以轨道动力学方程为基础,通过坐标变换以及近似处理,设计出近圆轨道下的动力学模型,并表示成状态空间表达式的形式,以此作为本课题的控制对象。接着对滑模控制的相关知识作精要介绍,重点是滑模控制器的设计,在设计控制器的时候,要对其行进稳定性分析,依据是Lyapunov稳定性定理。最后得到近圆轨道无扰动情况下的滑模变结构控制器,再在理想状态下对系统增加扰动因素,设计出扰动情况下的滑模控制器,最后,对以上两种情况进行MATLAB仿真分析,得出设计的控制器具有有效性的结论。文章最后通过改变参数来检测系统的性能变化,发现参数不同系统交会对接时间也相应发生改变,这一特点使得航天器近距离交会对接技术应用更加广泛。以及对扰动定界的必要性进行对比仿真,发现扰动定界是航天器交会对接成功的必要条件。
关键词:航天器,轨道相对运动方程,滑模控制,滑模控制器,MATLAB仿真。
Abstract
In the past ten years, spacecraft close-range rendezvous and docking technology has become more and more irreplaceable, and its application fields are very wide, such as the recovery of space products, fuel filling, spacecraft material replenishment and non-cooperative spacecraft interception. All aspects are involved.Therefore, in order to further develop aerospace technology, it is imperative to solve the problem of close-range rendezvous and docking control.
This paper first introduces the relevant coordinate system to be used in the subject, and then based on the orbital dynamics equation, through the coordinate transformation and approximation processing, the dynamic model under the near-circular orbit is designed and expressed as the form of the state space expression. This is the control object of this topic.Then the relevant knowledge of sliding mode control is introduced in detail, the emphasis is on the design of the sliding mode controller. When designing the controller, the stability analysis should be based on the Lyapunov stability theorem.Finally, the sliding mode variable structure controller with no disturbance in the near-circular orbit is obtained. Then, the disturbance factor is added to the system under ideal conditions, and the sliding mode controller under the disturbance condition is designed. Finally, the MATLAB simulation analysis is performed on the above two cases. , to conclude that the design of the controller is valid.At the end of the paper, the performance of the system is changed by changing the parameters. It is found that the reciprocal connection time of different systems is also changed accordingly. This feature makes the spacecraft close-range rendezvous and docking technology more widely used.And the simulation of the necessity of disturbance delimitation, it is found that the disturbance delimitation is a necessary condition for the success of the spacecraft rendezvous and docking.
Keywords: spacecraft, orbit relative motion equation, sliding mode control, sliding mode controller, matlab simulation.
目录
第一章 绪论 1
1.1 引言 1
1.2 课题背景及研究意义 1
1.3 航天器近距离交会对接概述 2
1.4 轨道控制理论概述 2
1.5 滑模控制理论发展现状 3
1.6 本文主要结构安排 4
第二章 轨道动力学模型与建模分析 6
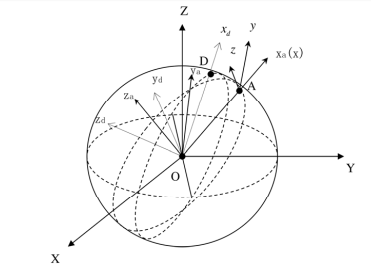
2.1坐标系的概述 6
2.1.1 惯性坐标系 6
2.1.2 Hill坐标系 6
2.1.3 目标航天器地心轨道坐标系 7
2.1.4 追踪航天器地心轨道坐标系 7
2.2 建模方法 7
2.3 航天器相对轨道动力学模型 7
2.3.1轨道相对运动方程 8
2.3.2 椭圆轨道相对运动方程 9
2.3.3 近圆轨道相对运动方程 10
2.3.4 系统的数学模型 10
2.4 本章小结 12
第三章 滑模控制 13
3.1 滑模控制的概念 13
3.2 滑模控制的相关知识 13
3.3 滑模变结构控制系统 14
3.3.1 滑模变结构控制的定义 14
3.3.2 滑模运动的相关性质 14
3.4 本章小结 15
第四章 近圆轨道下滑模控制器的设计 16
4.1 滑模控制器设计基本方法 16
4.2 理想状态下滑模控制器的设计 16
4.2.1 理想状态下切换函数的设计 16
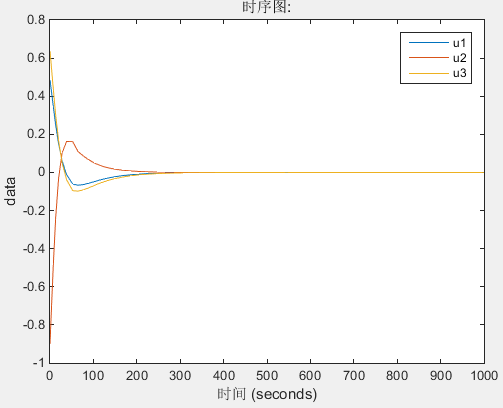
4.2.2 理想状态下滑模控制器的设计 17
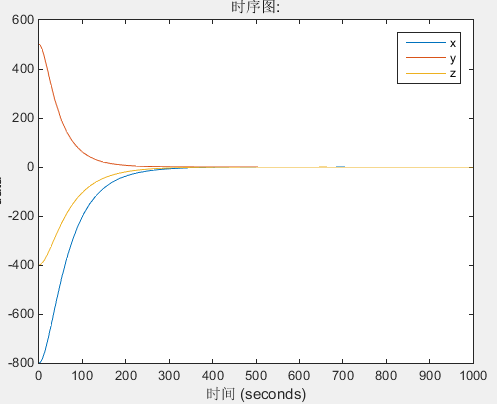
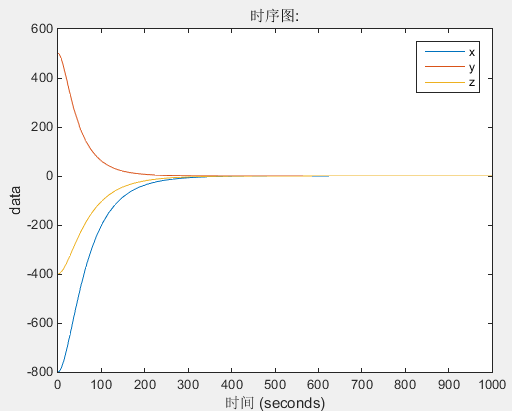
4.2.3 理想状态下的仿真分析 18
设目标航天器的轨道半径: 18
4.3 扰动情况下滑模控制器的设计 20
4.3.1 扰动情况下的相对运动方程 21
4.3.2 扰动情况下切换函数的设计 22
4.3.3 扰动情况下滑模控制器的设计 23
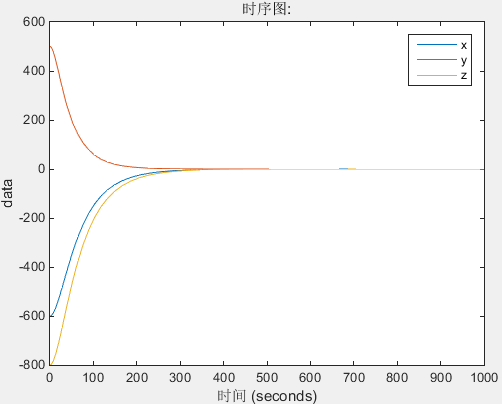
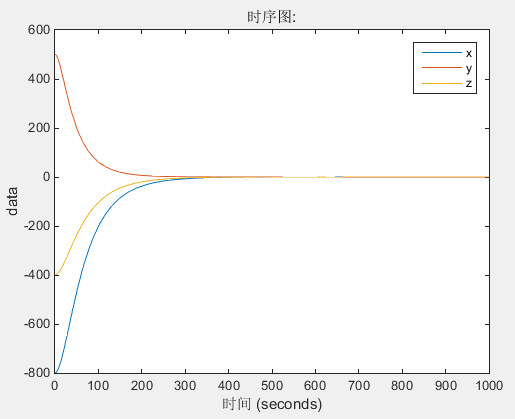
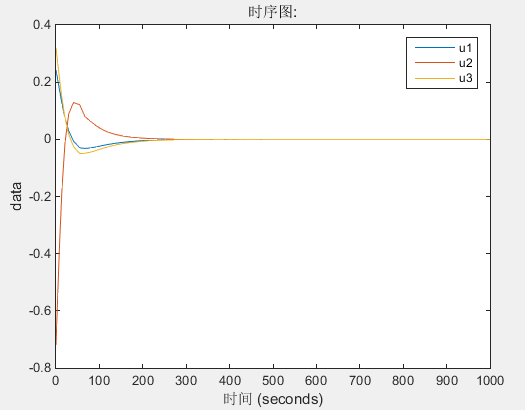
4.3.4 扰动情况下的仿真分析 24
设目标航天器的轨道半径: 24
4.4 本章小结 28
总结 1
参考文献 2
致谢 4
第一章 绪论
1.1 引言
从第一颗人造卫星发射开始,许多国家都意识到了航空技术的发展对国民生活和国防的重要性,从此以后,航空技术得到了快速的发展。多年来,航天技术已经运用于各个方面,比如用于探测的航天器,可以在空间中进行环境检测;用于通信的航天器可以进行通信的连接;气象航天器可以很准确的为人们提供天气预报;资源航天器可以为国家寻找在地面上不易寻找的各种矿产资源;军事航天器则可以增强国防实力。除此之外,平时人们最常用的GPS、现在中国大力发展的北斗导航系统等都和航天技术有关,这对人们的出行提供了很大的便利。所有实践都充分的证明,航天技术的应用已经和我们人类生活息息相关,并且对人类社会的发展已经起到了非常重要的作用,毫无疑问在以后的生产生活中航天技术也将扮演着不可代替的角色。
1.2 课题背景及研究意义
航天技术近几十年来的发展已然非常迅猛,作为它重要分支之一的航天器近距离交会对接技术,毫无疑问也发展得相当快。航天器近距离交会对接技术可以说是一种向航天器提供服务的通用性技术,比如在空间产品的回收、燃料加注、航天器物资补充等方面都有所涉及。由此可见,要使航天技术得到更进一步的发展,研究航天器近距离交会对接控制问题就势在必行。近二十年专家们从动力学的角度去研究航天技术,使得航天器近距离交会对接控制等高新技术得到越来越好的发展。1957年,苏联的航天史上发生了一件重大的事情,即首次发射第一枚人造地球卫星,这也是世界上的首次发射人造卫星,航空航天技术也因此在国际上有了巨大的影响,从此以后许多国家就加大了对航天器研制工作的力度,使航天技术从此以后的发展突飞猛进。1970年,是我国航天史上的重要一年,这一年我国完成了前所未有的一件大事: “东方红1号”成功发射,这是中国首次发射人造地球卫星,意味着我国的航天技术进入一个新的里程。
随着上个世纪50年代滑模变结构控制的出现,航天技术再一次发展迅速。滑模控制是一种普遍适用于非线性系统的控制方法,最大的特点是强鲁棒性,基于这个优点,它可以克服系统内部及外部的干扰,使系统最终达到稳定;另外一个优点是能够快速响应输入变换,使系统快速稳定。滑模控制从设计上可以分为两部分,即设计切换函数与控制律,从设计上来说是比较简单的。所以滑模控制的应用前景十分乐观,近些年来,特别是在航空航天技术领域上滑模控制已成为航天器控制方法的研究重点。
1.3 航天器近距离交会对接概述
航天器的近距离交会对接问题[1,2]可以分为两部分,即交会部分与对接部分。交会过程简言之就是两个航天器互相接近的过程,这个过程是在特定的轨道上运行的;而对接过程就是两个航天器接近之后通过特定的操作然后完全连成一个整体的过程。在航天器近距离交会对接的整个过程中需要特定的装置去实现,比如在地面上要有专门设备对追踪航天器进行引导、追踪航天器上还要安装能够自动捕获目标航天器位置信息的装置等。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: