四旋翼无人机的姿态控制毕业论文
2020-04-15 18:08:55
摘 要
四旋翼飞行器以它的外型小巧灵活、重量轻、速度快等特点受广大的市场青睐,无论是国内市场还是国外市场,军用还是民用,四旋翼无人机在各个领域都得到了 的
的 。传统的四旋翼无人机
。传统的四旋翼无人机 控制算法有不能很好的适应非线性被控系统、抗干扰能力低、鲁棒性较差等缺点。在本文中设计了一种基于扩张状态观测器的比例微分(PD ESO)控制方法,基于PD的控制基础下,加入一个扩张状态观测器(ESO)以估计系统所受到的内部扰动和外部扰动,提高系统的抗干扰性能,达到更理想的姿态控制效果。
控制算法有不能很好的适应非线性被控系统、抗干扰能力低、鲁棒性较差等缺点。在本文中设计了一种基于扩张状态观测器的比例微分(PD ESO)控制方法,基于PD的控制基础下,加入一个扩张状态观测器(ESO)以估计系统所受到的内部扰动和外部扰动,提高系统的抗干扰性能,达到更理想的姿态控制效果。
本文的工作主要包括以下几个方面:
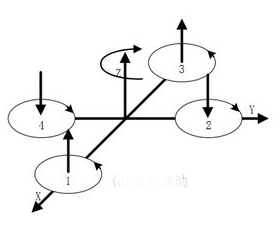
- 为了方便研究该被控对象,建立一个合理的数学模型是研究的基础和前提。四旋翼无人机较复杂的运动原理,更是体现了一个合理数学模型对于研究的重要意义。首先,通过剖析四旋翼的飞行原理,了解它的飞行特点,建立两个数学坐标系以表示它在空间中的位置与姿态,在受力分析的基础上,用拉格朗日-哈密尔顿体系推导出四旋翼无人机的
 。
。  器设计,通过四旋翼无人机
器设计,通过四旋翼无人机 的
的 ,设计
,设计 系统。基于
系统。基于 搭建
搭建 ,并对设计的控制器进行仿真分析,分析其优缺点。
,并对设计的控制器进行仿真分析,分析其优缺点。- 在PD姿态控制器的基础上,分析阐述其控制原理,加入扩张状态观测器(ESO)对四旋翼无人机的一些外在和内在的干扰进行估计,并加以补偿,改善PID控制器抗干扰性较差的缺点。对控制器进行
 仿真,并与PID控制器进行对比。
仿真,并与PID控制器进行对比。 - 验证四旋翼无人机基于扩张状态观测器的比例微分(PD ESO)控制器的有效性和鲁棒性,在已经搭建好的四旋翼无人机实物平台上进行实时的飞行控制实验。最终得到良好的实物控制效果。本文设计的控制器可以有效增强飞行器姿态控制的抗干扰性能,具有良好的鲁棒性且满足系统的控制性能要求。
关键词:四旋翼无人机;扩张状态观测器;PID控制器;姿态控制;
Abstract
The quadrotor is favored by the vast market for its compact size, light weight and fast speed. Whether it is domestic or foreign, military or civilian, the role of the four-rotor UAV in various fields is obvious. For the traditional PID control algorithm of quadrotor UAV, it can not adapt well to nonlinear controlled systems, low anti-interference ability, poor robustness, etc. In this paper, a pre-expansion state observer is designed.
This paper mainly includes the following aspects:
1. In order to facilitate the study of the controlled object, the establishment of a reasonable mathematical model is the basis and premise of the research. The structural characteristics of the quadrotor UAV are the well-known underactuated nonlinear systems with strong coupling characteristics, which embodies the significance of a reasonable mathematical model for research. Firstly, by analyzing the flight principle of the four-rotor, thinking about its flight characteristics, two mathematical coordinate systems are established to represent its position and attitude in space.
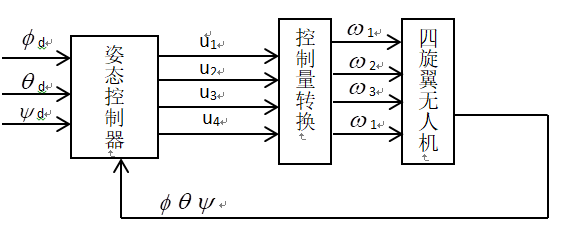
2. PID-based controller design to control the attitude of the quadrotor drone. Firstly, the overall control structure diagram is made, then the PID attitude controller is designed, the simulation model is built based on simulink, and the designed controller is simulated to analyze its advantages and disadvantages.
3. Based on the PD attitude controller, add the extended state observer (ESO) to estimate some external and internal interference of the quadrotor UAV and compensate it to improve the anti-interference of the PID controller.
4. In order to verify the effectiveness and robustness of the four-rotor UAV based on the feedforward compensation proportional controller of the extended state observer, real-time simulation flight control experiments were carried out on the established ARDrone physical platform. Adjust the parameters of the controller by inputting the required angle value through the computer, and finally do a good physical control effect. The experimental results show that the controller designed in this paper can effectively reduce the overshoot and tracking error of aircraft attitude control, and has good robustness and meets the control performance requirements of the system.
Key words: quadrotor UAV; extended state observer(ESO); PID controller; attitude control;
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1 研究背景及意义 1
1.2国内外研究现状 2
1.2.1国外研究现状 2
1.2.2国内研究现状 3
1.3国内外常用的四旋翼无人机控制方法 3
1.4本文主要研究内容 4
第二章 四旋翼无人机的数学模型 4
2.1 引言 4
4
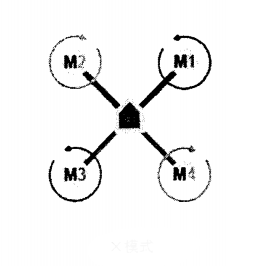
2.2 四旋翼无人机的结构及飞行原理 5
2.2.1四旋翼无人机的结构 5
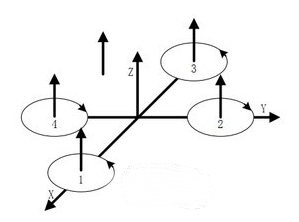
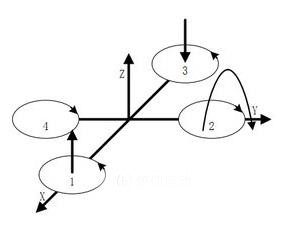
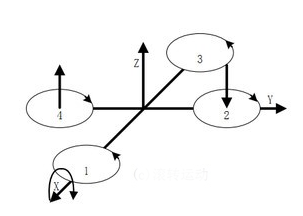
2.2.2 四旋翼无人机的飞行原理 5
2.3 四旋翼无人机的数学模型 8
2.3.1 坐标系定义及转换关系 8
2.3.2 动力学建模 10
第三章 基于PID控制的姿态控制 13
3.1 引言 13
3.2 四旋翼无人机姿态控制结构 13
3.3 四旋翼无人机PID姿态控制设计 13
3.4 基于Simulink的无人机姿态控制仿真 15
第四章 基于扩张状态观测器的姿态控制研究 18
4 .1 引言 18
4 .2 控制器的设计 18
4.2.1扩张状态观测器的原理 18
4.2.2状态观测器的设计 19
4.2.3 滚转角通道姿态控制器的设计 20
4.3 基于PD ESO控制器的Simulink仿真 21
第五章 四旋翼无人机平台实验 24
5.1 引言 24
5.2 实验部分 24
第六章 总结与展望 28
6.1 总结 28
6.2 展望 28
参考文献 30
致 谢 32
第一章 绪论
1.1 研究背景及意义
无人机(UAV,Unm anned Aerial Vehicle)[1]是一种能自主飞行避障的装置,是通过事先编写好程序的一系列硬件组成的。无人机的小巧便利,不需要人类驾驶员等优点应用能够有效加强人类对于自然的改造,提高工作效率,在科研、政府、商业活动及个人消费品等领域都有很大的应用空间。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: