船舶自动舵的控制算法研究毕业论文
2020-04-12 15:58:52
摘 要
现代科学发展日新月异,自动化控制技术越来越完善,控制工程已经达到了一个新的高度,各种各样的控制算法层出不穷,但是很多算法还是停留在理论阶段,实际条件情况并不允许这些算法能够轻易实现,因此现在很多机器和系统还是把PID算法作为主流算法。现今社会国家与国家之间联系越来越密切,世界就像一个地球村,国家之间贸易往来,文化交流都离不开海洋,船舶作为海上运载工具,扮演了一个非常重要的角色。船舶上的自动舵航向控制系统,一般还是PID控制,但是外界环境复杂, PID系统奥球的鲁棒性和自适应程度很难达到人们的要求。
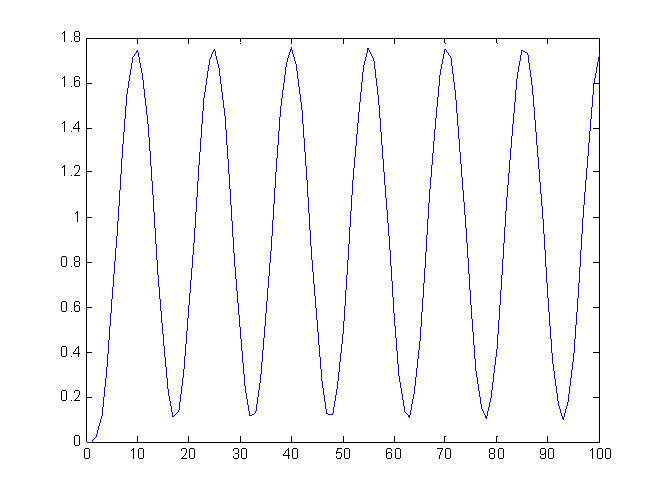
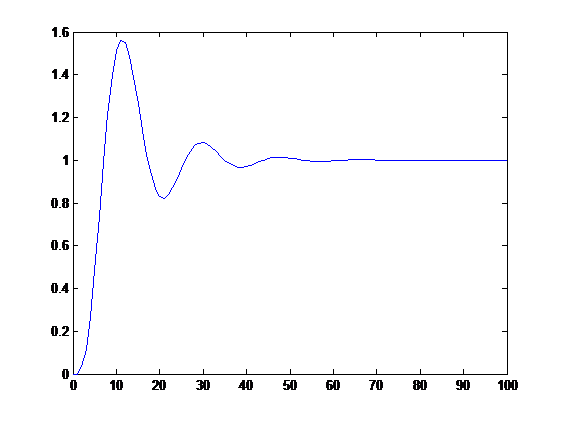
本文中人们基于模糊控制理论和模糊逻辑,设计出一种兼具PID和模糊控制优点的自适应模糊控制系统。并且将传统PID控制系统与新型PID模糊控制系统进行比较,新的模糊控制系统仿真结果具有超调量小,响应很快,误差率小等优点。
然后在模糊自适应PID控制器的基础上,研究量化因子和比例因子自动调节的子模糊系统,让整个系统的精度变高,对于不同的外部条件能更好的应对,本文设计出的系统也使得船舶在海上行驶时更加安全、稳定。
文中大多数仿真都是在MATLAB平台上,仿真得出了结论是基于模糊控制的PID控制器具有更好的性能。
关键词: 船舶航向保持系统 模糊控制PID 仿真
ABSTACT
With the rapid development of modern science, automatic control technology is becoming more and more perfect, control engineering has reached a new height, a variety of control algorithms emerge in endlessly, but many algorithms still stay in the theoretical stage. The actual conditions do not allow these algorithms to be easily implemented, so now many machines and systems still use PID algorithm as the mainstream algorithm. Nowadays, the relationship between countries and countries is getting closer and closer, the world is like a global village, trade exchanges between countries, cultural exchanges are inseparable from the sea, ships as a means of carrying at sea, played a very important role. Autopilot course on board shipThe control system is generally PID control, but the external environment is complex, and the robustness and adaptive degree of PID system are difficult to meet the requirements of people.
In this paper, based on fuzzy control theory and fuzzy logic, an adaptive fuzzy control system with the advantages of PID and fuzzy control is designed. Comparing the traditional PID control system with the new PID fuzzy control system, the simulation results of the new fuzzy control system have the advantages of small overshoot, fast response and low error rate.
Then on the basis of fuzzy adaptive PID controller, the subfuzzy system of quantization factor and scale factor automatic adjustment is studied, which makes the precision of the whole system become higher, and can better deal with different external conditions. The system designed in this paper also makes the ship more safe and stable at sea.
Most of the simulations in this paper are based on the MATLAB platform. The simulation results show that the PID controller based on fuzzy control has better performance.
Key words: Simulation of ship course keeping system;Fuzzy Control;
目录
摘要 1
ABSTACT 1
第1章 绪论 1
1.1课题研究背景及意义 1
1.1.1船舶自动舵的发展 1
1.1.2国内外自动舵控制算法研究现状 2
1.2论文主要安排 4
第2章 基础知识 5
2.1模糊控制的数学基础 5
2.1.1 模糊集合论 5
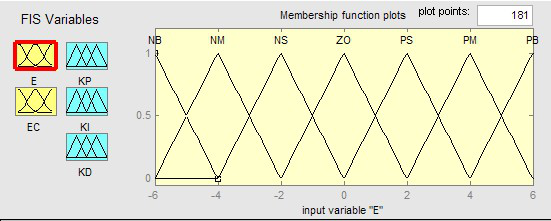
2.1.2 隶属度函数 5
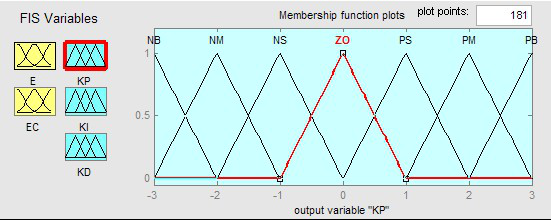
2.1.3 常用隶属度函数 6
2.2模糊控制的逻辑学基础 6
2.2.1 模糊控制知识库 6
2.2.2 模糊控制器推理 7
2.2.3 反模糊化处理 7
2.3 PID控制相关知识 8
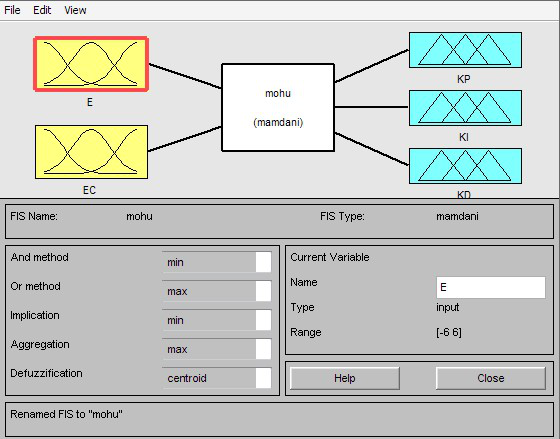
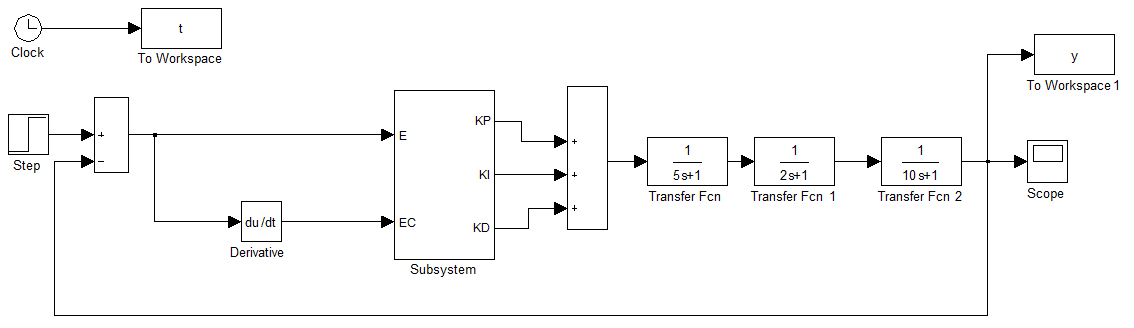
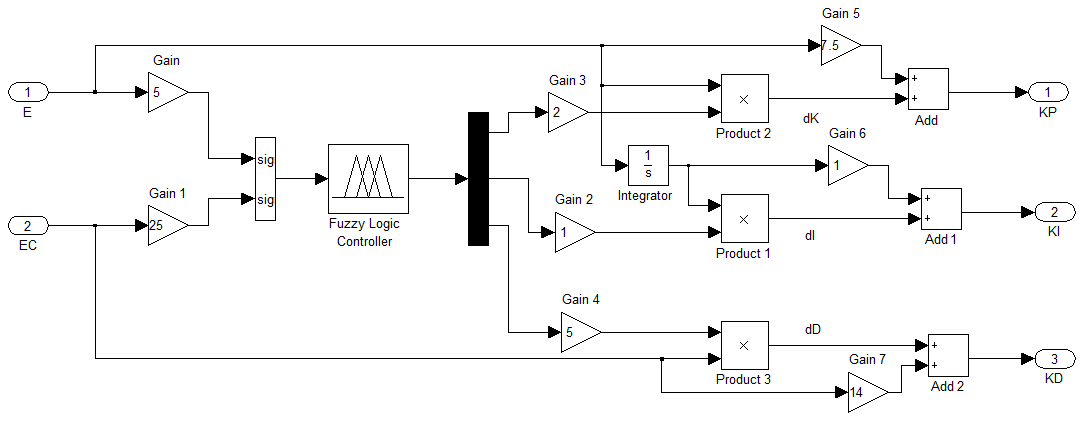
2.4 建立模糊自适应PID控制系统 8
2.4.1 传统PID和模糊自适应PID的仿真比较 9
2.5 本章小结 13
第3章 航向保持模糊控制器设计 16
3.1 船舶航向保持模糊控制器简单设计 16
3.2本章小结 18
第4章 对模糊控制器的量化因子和比例因子的修正 20
第5章 总结与展望 22
参考文献 23
致谢 24
第1章 绪论
1.1课题研究背景及意义
海洋是我们人类地球资源的重要部分,人类文明的发展离不开海洋的,除了海洋资源的开发,海洋上的航运与人类历史进步也是密切相关的。在不同地区之间,各个国家之间,海洋运输也是大型货物贸易的重要运输方式,海洋运输承载了重要的经济和国与国之间贸易交流意义。船舶作为海洋运输的承载体,是海洋运输中不可缺少的一部分。除了海洋运输,海洋资源开发及军事演习也都是在海洋上进行。船舶在海上的运动控制自然也是很重要的环节,船舶在海上航行的自动化程度与科技水平息息相关。目前船舶运动已经逐渐在自动化学科里面有自己独立的版块,越来越多的人开始进行船舶运动方面的相关理论研究,装备研发,系统设计及工程方面的研讨。并且在该领域已经取得了不少成果。
随着现代社会自动化技术发展并且趋于成熟,人们对于船舶在海上航行的要求越来越高,考虑到海上航行涉及到风向,温度,水位等多方面因素的影响,非线性控制系统开始进入人们的视野。从21世纪以来,非线性控制技术相比线性控制技术更加符合现实情况,成为了一种更流行更实用的新型技术。目前有几个完善的技术[1],用于分析非线性反馈系统:描述函数法、相平面法、稳定性分析、小增益定理、无源性分析、奇异摄动法等。而且还有一种非线性控制器设计的方法,即把一个有限的区域范围内,把非线性的区域趋近划分线性化,将一个非线性系统转化为线性系统,比如说讲系统增益调度。另外还有一种方法试图引入辅助的非线性反馈,来实现控制器设计的目的,即基于方法,如重新设计、非线性阻尼、滑模控制、反推法等[2]。
1.2国内外研究现状
1.2.1船舶自动舵的发展
船舶的运动控制主要分为两个方面:船舶的航向保持以及船舶的航迹保持。目前国际上的动力定位系统主要有kongsberg公司等。船舶动力定位系统目前分为以下几个部分。船舶测量系统是指动力系统的位置参考系统以及传感器部分,位置参考系统一般是采用DGPS,而水声位置参考系统一般是运用选择超短基线或者长基线声呐系统。船舶的航向保持系统是现代船舶在海上行驶的重要系统,是船舶运行不可或缺的部分。现在一些性能优异的系统可以大大提高船舶在海上运行的安全性和稳定性,有的船舶航向保持系统智能化程度很高,大大减少了海员的操作时间。随着现在海洋运输以及全球一体化进程加速,海上的航运量越来越大,人类对海上船舶运动以及航行控制要求逐渐提高。那么引入船舶自动舵技术以及对自动舵进行优化具有很大意义和实际应用价值。
船舶自动舵经历了几个发展阶段:机械式自动舵 PID舵自适应舵智能舵[3]自动舵的调节对象是船,被调节量是航向。自动舵是一个自动控制闭环系统,其中包括有航向给定环节,航向检测环节,给定航向与实际航向比较环节,航向偏差与舵角反馈比较环节。从1922年自动舵被人使用开始,自动舵就取得了长足的进步,减少了大量人力以及资源。
在20世纪20年代初期MINORSKY和SPERRY两位科学家提出自动舵概念并撰写相关论文。第二年就将船舶自动舵投入使用中,就是早期的机械式自动舵。这种自动舵运用很简单的自动控制原理,只能保持低精度的航向控制。
20世纪50年代,伴随电子学以及伺服机构理论发展完善,集成控制元件和电子器件变得更好,我们经常使用,在多个领域都有重要作用的PID舵诞生了。PID舵相较于第一代自动舵更加稳定,而且运用了比例-积分-微分控制的自动舵控制参数比较少,结构简洁明了,具有一定鲁棒性,提高了船舶运行的稳定性以及航向控制的精确程度。但是PID舵也存在很多问题,需要手动调节参数,无法根据实时情况进行调整,而且对于高频海浪采取的高频转舵很容易给海上行船增加阻力。在大风浪的情况下PID舵很容易大转向,使航行严重偏离航向,十分危险,导致事故发生。而且遇到一些情况时舵会主动进行大转向,这会造成船的动力系统损耗,而且做了很多无用功,白白浪费了很多的资源。
20世纪70年代,自适应自动舵成为主流研究方向。到了20世纪80年代,自适应自动舵发展迅速,微处理技术以及相对复杂的自适应控制理论应用在自动舵上大大提高了自动舵的精度和稳定性。这种自适应自动舵在很多方面弥补了PID舵的缺陷。自适应自动舵能较好的应对在控制航向过程中外界的干扰以及参数的多变性等PID舵无法解决的问题。并且可以根据外部系统参数的不断改变去调整控制器的输入,使船舶的非线性系统能保持在一个最佳状态运行。同时自适应自动舵增加了海上行船的航行速度,减少了人工操作时间,最重要的是减少了风浪和外界环境因素对于手工设定参数的补偿,让自动舵可以应对多种恶劣的天气环境。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: