外骨骼机器人协调控制算法研究毕业论文
2020-04-10 16:58:41
摘 要
机器人是一个融合了许多机械、电子和科学计算的多学科交叉领域,机器人技术在不同的应用领域进行演变和传播的同时也需要与其他领域的科学技术进行相应的联系。外骨骼机器人也是一样的,之所以称为外骨骼机器人,是因为它是一种穿戴在人体上,可以强化人体的某种能力的机器人系统。自从20世纪90年代诞生了第一个可穿戴机器人(用于放大人体力量,拓展人体可达性)之后,在机器人相关领域的所有进步已经开始向人机之间的合作转变,并用于提高人体在感知、操作、行走等方面的能力。
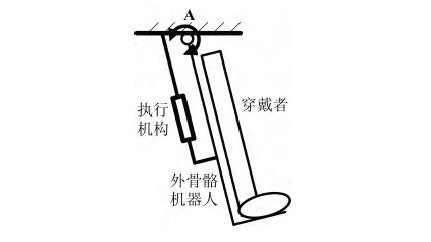
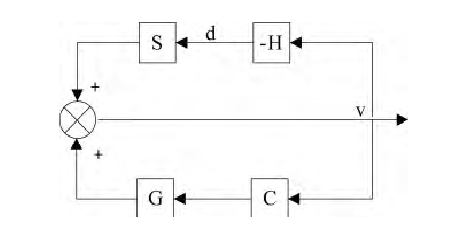
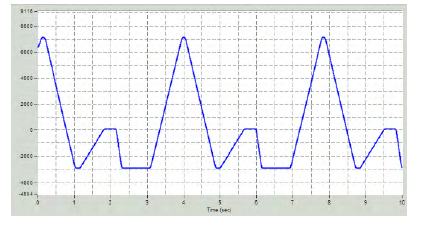
外骨骼机器人是机器与穿戴者人机耦合的机电一体化系统,为了实现外骨骼机器人的稳定运动控制,研究外骨骼机器人人机耦合作用情况,以下肢机器人外骨骼的单个关节为研究对象,建立了单关节的人机耦合双闭环控制系统,进行了外骨骼机器人的位置控制实验。实验表明,这种人机耦合双闭环控制系统可以实现外骨骼机器人的稳定控制。
关键词: 外骨骼机器人 , 人机耦合 , 双闭环控制
Abstract
Robot is a blend of many mechanical, electronic and multidisciplinary cross field of scientific computing, robot technology in different application fields for the spread of the evolution and at the same time also need to other areas of science and technology on the corresponding link. Exoskeleton robot is the same, so it is called exoskeleton robot because it is a kind of robot system that is worn on human body and can strengthen certain ability of human body. Since the 1990 s gave birth to the first wearable robot (used to enlarge the body strength, expand accessibility of the human body), after all progress in the field of robot related has begun to man-machine cooperation between, and is used to improve human walking in perception, action, etc.
Exoskeleton robot is a machine with the wearer human machine coupling mechanical and electrical integration of the system, in order to realize the stability of the exoskeleton robot motion control, study the exoskeleton robot man-machine coupling effect, with a single joint of the lower extremities and robotic exoskeletons as research object, the establishment of a single joint man-machine coupling double closed loop control system, the location of the exoskeleton robot control experiment was carried out. The experiment shows that this kind of human-machine coupled dual closed loop control system can realize the stability control of the exoskeleton robot.
Keywords exoskeleton robot , The man-machine coupling, Double closed loop control
目录
摘 要 I
第1章 绪论 1
1.1 课题研究的背景、目的和意义 1
1.2 外骨骼机器人国内外研究现状及分析 1
1.2.1 国外研究现状 2
1.2.2 国内研究现状 4
1.3 课题研究内容 4
第二章 外骨骼机器人的运动学及动力学特性 6
2.1介绍 6
2.2 机器人力学:运动学分析 6
2.3 人体生物力学 7
2.3.1人体运动的医学描述 8
2.3.1膝关节 8
第三章 外骨骼机器人控制算法 10
3.1 概论 10
3.2可穿戴机器人设计要素 10
3.3 人类肢体与可穿戴机械装置在运动学上的兼容性 11
3.4 基本控制方法 12
3.4.1 人一机闭合回路 15
3.5 机器人控制系统研究 16
第四章 结论 21
致谢 22
第1章 绪论
1.1 课题研究的背景、目的和意义
机器人的历史就是一个机器人与人类交互日益密切的历史。最初,机器人只用于工业环境下代替人类从事繁琐、重复操作以及对精度具有较高要求的工作。日前,机器人与人类操作员的交互程度不断深化,人机交互正在从人与服务型机器人之间的单纯信息传递(遥控操作)向着更加紧密的物理性、认知性交互方向扩展和过渡。
正是在这一背景下,可穿戴机器人(WR)的概念出现了。可穿戴机器人是种面向人类肌体的机器人,它可以被定义为由人类穿戴,具有补充或者完全替代人体肢体的功能。可穿戴机器人可以贴随人体四肢工作,如矫形机器人和外骨骼,亦可替代人类缺失的肢体,如截肢后安装的假肢。可穿戴性并非意味着该机器人一定是机动的、便携式的或自主的。在大多数情况下,因缺乏有效的技术手段,特别是缺乏驱动器和能源,导致了可穿戴机器人不能自己行走。
一个可穿戴的机器人可以被看作是一项技术,这项技术可以扩展、完善、替代或增强人体的功能和能力,或者(全部或部分)替代人类的肢体。在这种时代背景条件下,外骨骼机器人应运而生。按照作用的不同,外骨骼机器人可以分为助行外骨骼机器人和助力外骨骼机器人,助行外骨骼机器人用于协助失去行动能力的残疾人;助力外骨骼机器人用于强化人体的运动能力。本次设计的研究对象是下肢外骨骼机器人的协调控制算法。外骨骼机器人可以将人的腿和两条由电机驱动的机械腿结合在一起,感知人体的运动趋势,再通过协调控制算法来达到控制下肢外骨骼机器人按要求行动的目的。这种通过人机交互来控制外骨骼机器人的形式降低了自动行走的两足机器人复杂的步态规划问题的难度。此外,下肢外骨骼机器人可以帮助人体行走,为人体提供额外的动力,增强人体的行动能力,如加快行走速度、提高人体负担能力等,以及靠人体自身无法胜任的工作。
1.2 外骨骼机器人国内外研究现状及分析
作为机器人领域的一个分支,外骨骼机器人近年来得到了国内外越来越多学者的关注。就外骨骼机器人研究方面,美国在军事领域处于绝对领先地位,日本当属民用领域的顶尖高手,俄罗斯、韩国、意大利等国也在争相进行外骨骼的研究,借机抢占未来技术的制高点。国内从2004年之后也陆续有单位开始外骨骼机器人方面的研究,力争打造中国的超级战士,缩短国内外的差距。海军航空工程学院从2004年开始外骨骼技术的相关研究,分别在2006年、2008年、2009年和2015年研制了四代外骨骼机器人。
1.2.1 国外研究现状
综合对比,外骨骼是人机之间认知性交互(信息)和物理性交互(能量)最为密切的一类可穿戴机器人。对外骨骼科学技术的研究工作始于20世纪60年代早期,当时美国国防部对“加强型铠甲”这一概念产生了浓厚的兴趣,与此同时,康奈尔航空研究室提出了旨在增强人类操作者力量的“人一放大器一操控器”这一概念。早在1962年,外骨骼研制的相关技术规范已经成形,规范内容涵盖伺服器、传感器、机械结构及设计等。
1966年至1971年,通用电气公司在“哈迪曼计划”中进步提出了”人体放大器”的概念。哈迪曼概念从设计理念上讲更近似于主从式机器人,其提出了2套外骨骼系统的内外套嵌的设计布局,内部的外骨骼系统主要用于随同操作者作动,外部外骨骼系统则通过液压系统对内部动作进行了放大加强。作为2个驱动器间承担信息及能最传递的系统,扩展器这一概念提出于1990年(Kuerormi)。在以美国国防部高级研究计划局为首的众多军事科技研究部门的推动倡导下,时至今日,外骨骼在国防军事领域的使用研究取得了长足进步。
可穿戴机器人应用的另一重要领域是对人类肢体缺陷进行修复或功能补偿。被动式矫形装置和假体器官不属本文研究范畴,但可以肯定的是.二者确实可以被看做是目前矫形外骨骼的前身。早在一个多世纪前,H.Wangenstein教授就提出了为下肢残疾的科学家配备一个“移动助手”的设想。
这一创举为下肢残疾科学家的科研事业点燃了曙光,“移动助手”使他们得以跨越了身体的障碍,科学研究得以继续,科研事业不断发展。对于肢体残疾及创伤,时至今日我们也不可能全部治愈。尽管科学技术取得了突飞猛进的发展,但目前我们所知的许多著名的残疾人科学家仍未能通过科学手段复原肢体功能。借助外骨骼,我们却能改变这一状况。一架普通的轮椅通过骨架气动式改造就会变成部轻便的外骨骼,借助它,我们的残疾人科学家便能如常人一般自由走动了。若再加入自主操控技术,跑动跳跃等动作也可轻松完成。佩戴过程也不复杂:坐稳,胸、腰、大腿、小腿等部位绑紧固定带,太阳穴处安装神经脉冲识别电极,一切就绪,准备活动吧。
Wangenstein教授于1883年所提出的这一概念已经具备了现今最先进的可穿戴机器人装置的主要特征——气动式骨架(轻型外骨骼)和对人体下肢的映射设计,其中认知性人机交互界面则通过大脑活动识别电极(即神经脉冲识别电极)得以实现。
机械扩展器的后续应用主要围绕上肢机械矫形装置( Rbischog.1982)。主动式矫形装置的研究开始于20世纪50年代中期(Banke.Nitiningele ill, 1956),而第一台驱动型娇形装置于 200才由Rahmn 人研制成功,在功能性上,肢娇形装置研制的初表是为了解决部分人上肢力量不足的问题。
1960年,通用电气公司研制一种名为“哈曼迪1”的可佩戴单兵装备,采用液压驱动。该公司第一个提出并开展增强人体机能的主动助力型外骨骼机器研究。其外骨骼体积巨大且笨重,安全性能低,也只能取代单只手功能。
1978年,麻省理工学院研究了“增强人体机能的外骨骼”,负重问题有所改善,其驱动能源与便携式问题尚未解决,没有完整的成果。
1991年,日本神纳川理工学院开发了一套独立的可穿助力外套(如图1所示),使用肌肉压力传感器,分析佩戴者的运动情况,通过微型气泵、便携式镍镉电池及嵌入式微处理器,提供足够的助力。该开发产品是专为护士研制,可使人的力量增加0.5~1倍。
人体外骨骼助力机器人起源于美国1966年的哈德曼助力机器人的设想及研发,到今天整体仍处于研发阶段。以下是近些年有代表性的研究成果。
1 日本外骨骼机器人HAL3
混合式辅助假肢(HAL),是一个由Tsukuba大学开发,为使用者下肢准备的辅助设备。为了帮助或增强人体行动,该系统必须像肌内一样产生扭矩。为此,需要检测操作人员的行动,从而收集肌电信息(Ferris、Sawicki、Domingo)。要产生扭矩,必须通过肌肉力量进行黏弹性控制以及僵硬度调整。当使用者需要高位关节黏弹性时,比较有用的方法是提高HAL执行器的黏弹性从而对运动进行辅助。
2 以色列:“外骨骼”助力装置ReWalk
以色列公司ReWalk的前身是 Argo Medical Technologies医疗科技公司, 主要制造可穿戴外骨骼动力设备,帮助腰部以下瘫痪者重获行动能力。ReWalk于2012年获得欧盟认证,打入欧洲市场,此前在以色列和美国已经进行了数年临床测试。今年6月ReWalk的外骨骼产品通过了美国药物与食品管理局(FDA)的审批 ,这是迄今唯一一款也是首款获得FDA批准的外骨骼产品。 ReWalk技术采用了体感芯片,捕捉患者的肢体动作,帮助行走。通过电池驱动关节部位的电机,组成电动腿部结构,在行走过程中可以感应患者重心的变化,模仿自然行走的步态,并能根据实际情况控制步行速度。患者还能自行完成安装和拆卸。
3 美国伯克利大学军方合作项目——外骨骼助力机器人士兵服
由背包式外架、金属腿及相应的液压驱动设备组成,机械系统采用了与类人形结构相似的设计,背包式外架能够使操纵者携带一定载荷,其有效作用力不经过穿戴者而直接经由外骨骼传至地面。下肢外骨骼能够携带外部负载和自身的重量(包括操纵者的重量)在崎岖路面远距离行走,能使带有全副武装的士兵增强负重能力和提高行军速度。
1.2.2 国内研究现状
国内由于对外骨骼机器人的研究开始较晚,所以尚处于初级阶段。一些科研院所和高校对外骨骼机器人的结构、驱动方式和控制算法等方面进行了初步的理论探索和仿真。国内对外骨骼下肢助力机器人的研究开始于20世纪初, 目前外骨骼下肢助行机器人的研究正处子起步阶段。
中科大智能所研究的可穿戴型助行机器人, 具有10个自由度系统,利用表皮肌电信号分析穿戴者的运动意图。
浙江大学研制出了多自由度下肢外骨骼助行机器人, 驱动器使用气动驱动,髋关节和膝关节驱动器为圆形气缸,可以将足底压力信号和气缸的位移控制信号直接关联起来,能够较好的判断穿戴者的运动意图 。
华东理工大学也在做有关方面的研究,已经完成了一套液压驱动的实物样机。中国北方车辆研究所在人体外骨骼机器人的计算机虚拟建模和仿真等方面做了细致的研究,并在行走助力机器人用小型液压缸设计等方面有的重大进展。除此之外,还有很多相关科研机构展开了不同的研究项目,例如:海军航空工程学院在机器人外骨骼的电机驱动方面开展了研究;北京工业大学在外骨骼机器人的机构设计方面展开了一系列研究。
1.3 课题研究内容
机器人是一个涉及诸如机械电子和科学计算的多学科交叉领域,机器人技术在不同的应用领域进行演变和传播的同时仍然需要与其他领域的科学技术进行强烈的互动。
可穿戴机器人也有同样的需求,所谓的可穿戴机器人是一种穿戴在人体上用于增强人体的某种能力的机器人系统。自从20世纪90年代诞生了第一个可穿戴机器人(用于放大人体力量,拓展人体可达性)之后,在机器人相关领域的所有进步已经开始向人机之间的合作转变,并用于提高人体在感知、操作、行走等方面的能力。虽然机器人技术书籍的数量是巨大的,但是现有的针对特定的机器人应用领域的文献还不丰富,而且看上去似乎还没有一本哪怕是概要介绍可穿戴机器人这一特定的新兴领域的书籍。
可穿戴机器人是一个新兴领域,构成了机器人系统的前端科技,其主要特点是人参与了控制回路。该领域的研究进展不断扩大,明显的例证就是不断增多的大量先进的研究文献、设计原型,甚至是商业化产品。而且,通过识别处理可穿戴机器人所涉及的主要概念,在可穿戴机器人领域,人/机器人交互是一个关键问题,不管是从物理或认知的角度来看,或同时从这两种角度来看。因此,要想在该领域进行研究和开发,除了扎实的机器人技术知识之外,还需要其他一些背景知识,包括人体解剖行为、人的神经和认知系统。在这种情况下,为了再现人类的功能或复制人类的行为而进行的基于仿生的仿生设计具有特别重要的意义。可穿戴机器人必须针对特定的工作条件来进行设计,例如,它需要适应由不同的穿戴者带来的非固定式的结构,必须是柔顺的、轻巧的,对穿戴者来说,它必须足够安全,同时,它也必须具有必要的接口,从而方便人们来操控它。
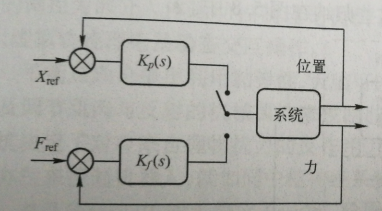
在这种情况下,在讨论外骨骼,不管是上肢外骨骼或下肢外骨骼,还是躯干外骨骼,抑或是矫形器/假肢元件的形式之前,我们都需要一种合适的控制算法来保证外骨骼的稳定性和快速响应的能力。因此,本次设计主要探讨下肢外骨骼机器人的协调控制算法。
第二章 外骨骼机器人的运动学及动力学特性
2.1机器人运动学简介
本章研究了对人类外骨骼系统进行运动学及动力学特性分析的基础知识首先是介绍了机械装置的运动学及动力学特性。
有趣的是,在给定的合理假设下,分析机器人的方法可以用来分析人类的运动学和动力学特性。举例而言,人体建模时最常见的是假设人体由刚性连杆链接而成,在该链接中,每一部分都有类似人类身体的特定属性,如长度或是转动惯量。这些组成部分之间由关节相连,这些关节模报了人类关节运动的自由度和活动范围。
因此,本章首先着眼于机器人的力学原理。关于机器人的位置和姿态的表达是为了引人Denavit- Hatenberg转换算法,该算法是一种描述机器人位置和姿态的系统方法。本部分结尾将从运动学的角度讨论机器人的可操作性。下一节将解决机器人的动力学问题,并引人运动学方程组,动态可操作性和状态空间中对机器人的动力学描述。接下来,我们回顾描述运动学和力学特性的方法论,它和人类的运动学和力学特性类似。尽管关于上下肢的生物力学分析十分简略,但是已经足够详细地说明了上下肢的参数的来源,该部分同时介绍了人类运动的动力学分析。最述了不同层次的不同模型,以及外骨格系统的运动冗余问题,该问题是指在给定的任务情况下,系统的自由度多于所需的自由度。而在可穿戴机器人的设计方面主要是根据下肢来讨论。
2.2 机器人力学:运动学分析
作为力学分支的运动学,主要研究的是物体或液体的运动而非产生这些运动的力。当涉及多体运动、机器人关节运动一一特别是外骨骼运动时,运动学主要分析的是每个机械连杆相对于参考坐标系的运动,主要包括:
(1)将运动描述为时间的函数;
(2)机器人末端执行器的位置和方位与机械结构之间的非线性关系。
在这种背景下,由众多串行连杆组成的机器人的运动性,M被定义为独立参数q的数量,9用于确定每个连杆的位置( Pons, Ceres和Peifer, 1999)。一个特定的机器人结构是q(i=1.2...n)的向量,这个向量是可实现的,并且是关于时间t的独立参数。机器人的冗余度是指对于机器人未端执行器的特定的位置可以获得的机器人结构的数量。高冗余虽然使得控制变得复杂,但是提升了灵活性。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: