两轮自平衡小车控制系统设计毕业论文
2020-04-10 14:42:28
摘 要
本次设计的主要任务是设计一个能够实现基本功能的两轮自平衡小车自动控制系统。双轮平衡车具有高度不稳定性,它的动力学系统的特性使它成为各种控制系统研究的很好的平台,它的机动性强,采用绿色能源供电,无尾气排放,无大气污染等诸多功能,成为当下研究的重点,发展的热点。
本文首先根据动力学定律对两轮自平衡小车的平衡原理进行了分析并建立了基于一级倒立摆的数学模型,分析了控制系统的基本特点,再对各主要模块进行选型设计,最终选择了STM32F103C8T6单片机作为主控制器,MPU6050作为姿态检测模块,TB6612FNG作为电机驱动模块,锂电池作为电源,进行了总体方案设计。并在此基础上,设计了STM32单片机的最小系统,电源电路,MPU6050工作电路,电机驱动电路等。在确定好硬件系统之后,本文进行了软件系统的设计,在确定算法总流程之后,分别进行了系统的初始化,数据的融合与PID控制器的设计。最后完成了两轮自平衡小车的自动循迹和测距避障的功能。
关键词:双轮平衡车;STM32单片机;MPU6050;PID控制;循迹;避障
Abstract
This project aims to design a more complete two-wheeled self-balancing car automatic control system. Two-wheeled balancing vehicle is highly unstable. The characteristics of its dynamic system make it a good platform for various control systems. Because of its strong mobility, use of green energy, no exhaust emissions, no air pollution, and other functions, the two-wheeled balancing vehicle has become the focus of current research and development.
Firstly, according to the law of dynamics, this paper analyzes the balance principle of two-wheeled self-balanced trolley and establishes a mathematical model based on an inverted pendulum. It analyzes the basic characteristics of the control system, and then selects and designs the main modules. Finally,we choose STM32F103C8T6 microcontroller as the main controller, MPU6050 as a gesture detection module, TB6612FNG as a motor drive module, lithium battery as a power supply.Then,the overall scheme design was carried out On this basis, the minimal system, power supply circuit, MPU6050 working circuit and motor drive circuit of STM32 single-chip microcomputer are designed. After determining the hardware system, this paper designs the software system. After determining the total flow of the algorithm, the system initialization, data fusion and PID controller design are performed respectively. Finally, the automatic tracking and obstacle avoidance functions of the two-wheeled self-balancing car are completed.
Keywords: two-wheeled self-balancing vehicle;STM32 microcontroller; MPU6050; PID controller; tracking; obstacle avoidance
目录
摘要 I
Abstract II
第1章 绪论 1
1.1两轮自平衡车的研究背景 1
1.2两轮自平衡车的研究目的及意义 1
1.3两轮自平衡车的研究现状 2
1.3.1国外研究现状 2
1.3.2国内研究现状 4
1.4本文的主要内容及章节安排 4
第2章 平衡车总体方案设计 5
2.1自平衡小车的平衡原理 5
2.2自平衡小车的整体方案设计 7
2.3功能模块选材 9
2.3.1控制模块选择 9
2.3.2姿态检测模块选择 9
2.3.3电机模块选择 10
2.3.4电机驱动模块选择 10
2.3.5电源模块选择 11
2.4本章小结 11
第3章 自平衡小车控制系统硬件设计 12
3.1 STM32芯片及其最小系统 12
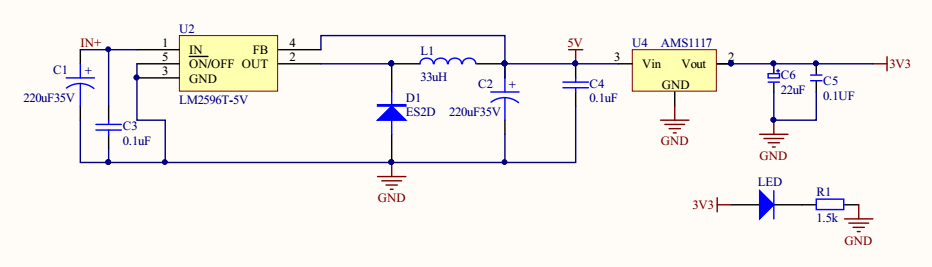
3.2电源电路设计 13
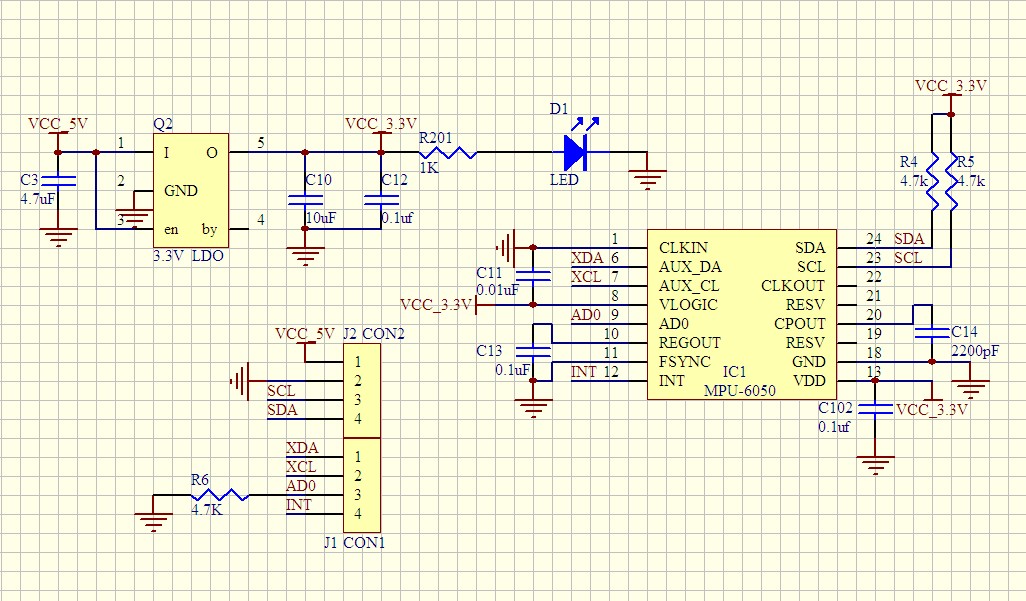
3.3姿态检测模块设计 13
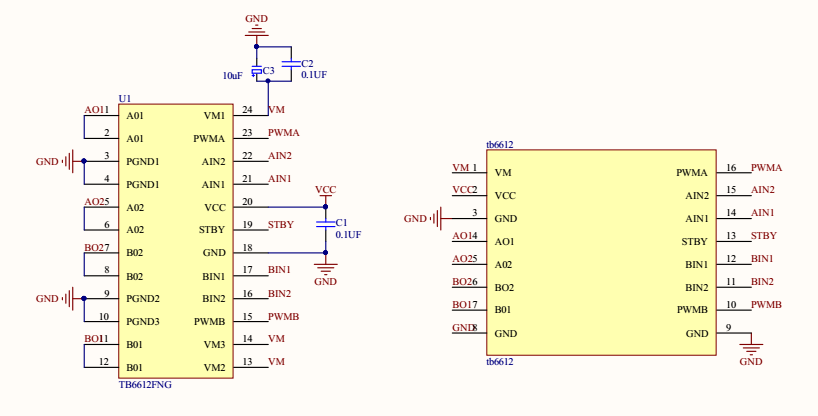
3.4电机驱动电路设计 14
3.5本章小结 15
第4章 自平衡小车控制系统软件设计 16
4.1两轮平衡车控制系统总流程 16
4.2程序初始化 17
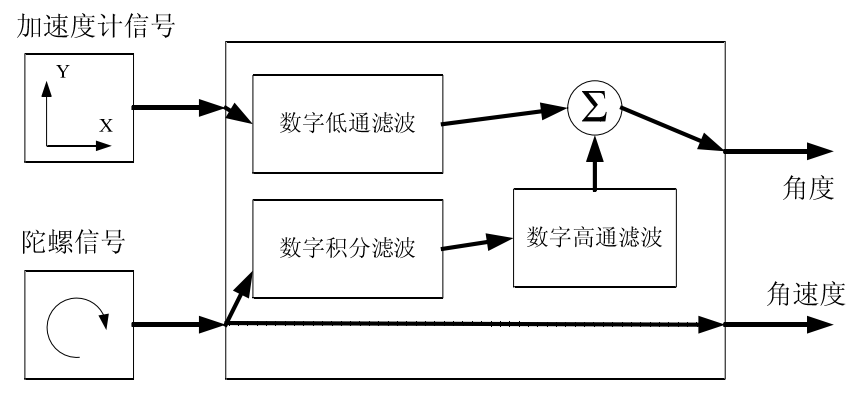
4.3 数据融合 18
4.4 PID控制 19
4.4.1 PID控制器的设计 19
4.4.2两轮自平衡车的PID运动控制 20
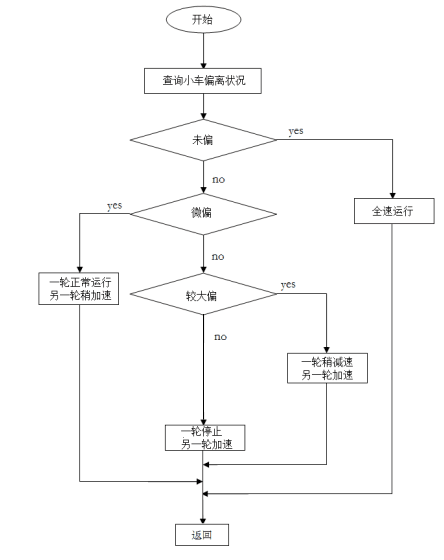
4.5自平衡小车循迹流程 20
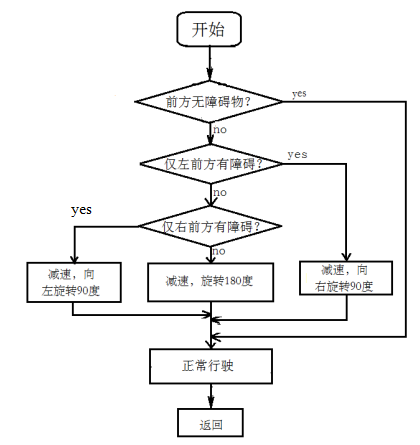
4.6自平衡小车避障检测流程 22
4.7 本章小结 24
第5章 总结与展望 25
5.1总结 25
5.2展望 25
参考文献 27
致谢 29
第1章 绪论
1.1两轮自平衡车的研究背景
随着经济的发展和社会的进步,私家车的数量增长迅速,越来越多的人选择汽车作为出行方式,从而导致我国多数地区受到雾霾的困扰。尤其是一线城市和东北、华北地区,雾霾现象更加严重。2000年我国汽车全年销售量仅有 208.6 万辆,2000-2017年间,中国汽车销量增长13.8倍,复合增长率达到22.7%。截至17年6月份,我国汽车保有量已达 2.05 亿辆。
随着我国汽车产业的迅速发展,其造成的环境污染问题不容小视。2016年1月,环保部发布《2015 年中国机动车污染防治年报》:全国机动车排放污染物4547.3万吨。此外,中国原油对外依存度不断攀升。原油是一个国家经济的血脉,对外依存度的不断提升严重威胁着我国的能源安全,不利于我国经济长期、稳定、健康的发展。在2016年中国汽油消费量为1.2亿吨,占原油表观消费总量的20.1%。车用汽油占全国汽油消费70%以上,占原油表观消费量的14%以上,若按照我国汽车平均油耗降低 23.1%(由2016年的6.7L/100km降低至2020年的目标值5L/100km),至少可节约汽油1938万吨,降低原油对外依存度1.2个百分点,大力推行汽车节能技术对缓解我国能源压力意义重大。数量庞大的私家车除了造成环境污染和资源浪费之外,还带来了交通拥堵和社会生产效率低下等问题,因此社会上急需一种短途的代步工具。两轮自平衡小车作为小型车和微型车的代表,正符合了社会发展的需求和智能交通的潮流。
与此同时,在人们的工作和研究中,可能会遇到各种人体无法操作或承受的复杂情况,像恶劣的环境,超负荷的物品运输,狭小的探测空间,以及军事领域的侦查和航空航天领域的探索研究,这就需要一个智能的移动机器人来帮助完成,两轮自平衡小车作为小型移动机器人的代表,恰好能很好的完成这些任务,这也为多功能平衡车的研究发展提供了广阔的空间。
1.2两轮自平衡车的研究目的及意义
因为两轮自平衡小车独特的结构和控制特点,它的优点十分明显。
- 运动方式灵活。它的转弯半径能缩小到零,接近于原地旋转,而因为它的体型较小,所以能在较为狭小的空间内自由运动,这种灵活性很强的两轮自平衡车更适合作为短途代步工具。
- 控制智能化,所以平衡车的车身具有良好的平衡性,而操作中只需对控制器进行相应控制,就可以实现轻松操作。
- 控制系统机械构造简单,工作方式为差分式驱动方式,即两轮共轴,并各自独立驱动,只需控制平衡车的转向、转速等,所以不需更多复杂的构造。
- 操作十分方便,使用者只需通过调整自身的重心点就能实现平衡车的前进等操作,没有刹车系统,微处理器能给出正反力矩,以达到稳定而快速的刹车效果。它也没有更多复杂操作环节,所以适合大多数的群体去使用。
- 应用广泛,它的体积不大,占地面积也少,基本形同于人们走路时的体积,可以行进在各种场合。
- 节能环保,其动力能源为电能,可以通过充放电反复使用,和化石燃料相比,更清洁环保,它不仅能够提高人们的短途交通效率,最重要的是能够有效的缓解我国的能源、交通和环境压力,因此,两轮自平衡小车是短途交通过程中的最佳的代步工具。
- 形式多样。比如,轻型的平衡车可以适应马路的代步和运输,越野型的平衡车则适合高尔夫球场和足球场等路况的代步和运输,多功能的平衡车则可应用于军事和航空航天领域。
- 兼具研究意义和实用意义,两轮自平衡车的实际应用广泛,而在学术学习和研究方面,两轮自平衡小车的数学模型具有很重要的研究价值,它依据倒立摆原理设计,是一种非线性,强耦合,不稳定,高阶次且受到非完整的运动约束的运动控制系统,是检验各类控制理论效果的典型的工具。研究者可以对其进行数学建模加以分析,并依靠各种控制理论来实现对整体的控制。倒立摆模型是个较为复杂的数学模型,常常被当做理想情况来检验各种控制理论。同时它的结构特点是的它的体积小,质量轻,移动便捷,非常节约研究成本,同时使得实验的过程更加方便,而且易于观察出明显的实验效果。因此两轮自平衡小车是一种有潜力的理想的控制理论平台,成为各国学者争相探讨的内容,也是控制理论教学中的经典案例。
1.3两轮自平衡车的研究现状
1.3.1国外研究现状
在1986年,日本的山藤高桥首次首次将他的研究成果公布出来,提出双轮平衡车的想法,他积极申请专利,于次年成功。他的理念中,机体的上部有驱动电路和控制电路,倾角则采用接触法。该专利在年后被批准。该平衡车的算法不是非常优秀,姿态监测系统也不够准确,因此被多数科学家忽略。
在1996年,Yuta和Ha在控制策略上有了一定的发展,他们根据状态反馈,设计了Yamabico Kurara。它已经基本具备了平衡车的雏形,电机驱动轮子,倾角依靠陀螺仪测量得到,轮子转速由编码器得到,Yamabico Kurara在平衡的基础上还能够行进是引起人们注意的关键,日本在该领域的发展也占据了先发优势。
在1999年,韩国的Kim后来居上,提出重要的线性化的方法来解决控制中的问题。自此,双轮平衡车的姿态和位置都能得到良好的测量。
在2001年,作为发明家的迪恩卡曼,将他研发的segwey上市,从此,两轮平衡车在美国实现了商业化,它成为了一款交通工具,不仅在原有功能上有了进步,还更加安全和时尚,充满了观赏性。陀螺仪个数的增加使得姿态检测系统更加精准,采样率更高,而转向需要自己操作,通过把手转向需要的方向。因为没有相应的法律和交通规则,而且价格昂贵,所以它只能在高端消费领域受到一些关注,或者在一些广场或者游乐场所出现。
它也一直没有获得美国的上路许可,毕竟安全性不能保证。
在2002年,由瑞士联邦工业大学的费利克斯格拉泽等人研制成功的通过遥控器进行控制的两轮自平衡移动机器人JOE诞生。它不仅速度快,而且采用了先进的自适应模糊控制算法,使得它的控制系统本身就比其他的平衡车优良很多,它的行进速度也赶上了小跑的速度。除了电源和姿态监测系统继承了之前的研究之外,该产品还应用了DSP来完善控制效果。
同年,玩具公司乐高在研究很长的周期后,上市了玩具平衡机器人NXT。乐高公司最大的贡献在于促进了自平衡机器人的普及。硬件系统提供给用户之后,买家可以自定义进行软件的开发,这就促使更多玩家学习相关领域的知识,促进了相关研究的发展。
2004年,由美国布朗大学的爱德华设计完成的两轮自平衡移动机器人Crunch诞生。它的CPU采用两个ATMEGA控制器,同时实现了导航和姿态信息的数据处理。上位机首次在该产品中出现,当它匹配了地图并自动完成导航计算后,还能实现无线通信。
同年,Bender诞生。它是由Homebrew机器人俱乐部的泰德拉尔森和波比阿伦共同开发。它卓越的工业设计和机械结构使得它能更有效地控制自身的行进,最终摘得“Best Of Show”金牌。
在2008年,美国的Tiger电子和日本Sega玩具公司加强合作,把独家的陀螺仪和声纳红外技术创造性的结合,推出了AMP。这是真正意义上的玩具双轮车,不仅能歌善舞,还可以跟随目标移动。
在2014年,独特的MIP被研发出来,它不仅体型娇小,还具备了躯干和胳膊,是服务性双轮平衡车的代表。WowWee和"机器人实验室"为它加入了蓝牙通信,不仅能自由行进,还能实现和人的互动,完成端茶送水等指令。
1.3.2国内研究现状
在2003年,中科大研发了FreeMover,并且拥有它的专利和版权。嵌入式CPU和多个姿态监测传感器,加上优良的控制算法,使得计算出的结果更加精准。电机收到转换后的PWM信号后,控制转向和平衡。该项目具有很好的商业化前景,并且获得多次大奖。
在2004年,中段旭东等参考JOE对倒立摆系统的建模进行了深入研究,并讨论了各种不确定性。
同年,北京理工大学等多所高校联合研发,为双轮电动车添加了安全轮。利用Lagrange方程,他们建立的数学模型具有三自由度,在配置极点的基础上进行了仿真。
在2005年,叶聪红把随动轮加入了平衡车中。平衡车的路径规划能力得到了拓展。抗干扰能力也在西安电子科技大学的研究下得到了提升。
同年,由8051单片机作为CPU的Sway由哈尔滨工程大学的尹亮研发出来;反射式红外线距离传感器被应用到了倾角测量中,相比只有陀螺仪的监测系统,大大提高了精度;数据通讯也获得了突破性进展,上位机和机器人之间的数据传输更加智能化;人机交互界面采用了LCD,供电的电源被完全隔离,这对减小干扰有重要意义。
而Robst象征着中国相关研究的产业化的实现,这对理论研究和商业发展都很有帮助。香港易布科技使国外的垄断破产,对中国高科技发展起到了重要作用。
在2014年,台湾国立中央大学和哈尔滨工程大学相继制作出新型平衡车。从算法到传感器都较以前有了更大的进步。
1.4本文的主要内容及章节安排
本文介绍的主要内容安排如下:
(1)第1章 绪论,主要介绍了两轮自平衡小车研究的背景,研究的目的及意义以及国内外的现状和相关的基础知识。
(2)第2章 总体方案设计,对平衡小车的平衡原理进行了分析,进行了总体方案的设计,展示了两轮自平衡车的整体结构,并对各主要模块的选材进行了对比,选取了合适的模块。
(3)第3章 对各模块工作电路的设计。
(4)第4章 基本功能和循迹避障功能的软件控制。
(5)第5章 本章对本文的工作进行了总结,并分析了本文所提出的控制系统设计的局限性以及可能的改进研究方向,并对进一步的研究提出了展望。
第2章 平衡车总体方案设计
2.1自平衡小车的平衡原理
小车的直立平衡是小车完成各种运动和功能的前提,只有精准地控制电机,保障车轮的转动,才能使控制系统更完善。因此,在进行软硬件设计之前,需进行数学建模,并对其数学模型进行分析。
小车的理想模型是一级倒立摆,首先,我们可以对单摆和一级倒立摆进行受力分析,从而得出需要控制的变量。一级倒立摆模型如图2-1所示。
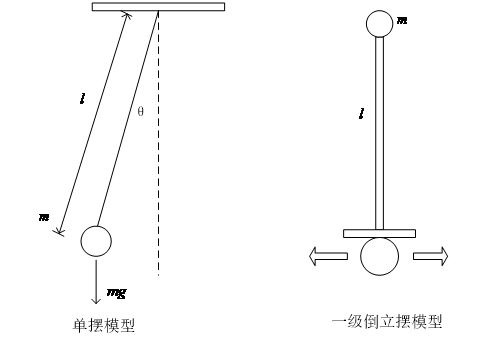
图2-1 小车的级倒立摆模型
由动力学定律可知,当偏离中心位置时,线和重力的合力就会作用于单摆,使物体趋向平衡位置。
对单摆进行受力分析如图2-2所示,由于空气阻力的原因,在偏移角度不是太大的情况下,物体总能来回振荡并最终静止在平衡位置。而空气阻力的大小与摆动的速度成线性关系,起到反作用。因此单摆平衡的关键在于受到回复力和阻尼力的双重作用。
如果是无阻尼状态,则物体会左右晃动无法停止,如果是欠阻尼状态,物体会在平衡位置处微微振荡难以停止。所以,为了找出单摆平衡所需的最短时间,需要确定合适的临界阻尼系数。
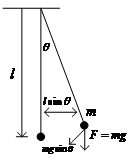
图2-2 单摆受力分析
当理想状态时,即忽略滚动摩擦时,一级倒立摆的受力分析如图2-3所示。此时,回复力不再是反方向,这也是倒立摆无法自动恢复到平衡位置的原因。此时,回复力还会成为动力,加速倒立摆的移动。由此可知,想要让倒立摆能够实现自平衡,只有两个办法。第一个方案是改变其受力方向,重力本身垂直向下,无法改变,因此只能用第二种方案,即再增加一个方向相反的力与其他力形成合力,使合力的方向与运动方向相反。

图2-3 一级倒立摆模型受力分析图
当倒立摆做加速度运动时,它的受力分析如图2-4所示。在控制倒立摆的平衡时,由于偏移角θ不大,线性化是十分必要的。线性化之后,加速度和偏移角度成线性关系。如果能使得比例系数大于重力加速度,则可以实现回复力方向的反转。因此想要倒立摆尽可能快的恢复到平衡位置,合适的阻尼系数的选取十分重要。
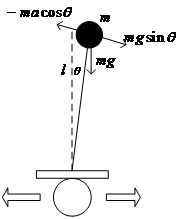
图2-4 非惯性系中的倒立摆受力分析
综上所述,若想平衡小车实现平衡,需要控制其电机的转速产生相应的加速度来维持车体的平衡。
2.2自平衡小车的整体方案设计
双轮自平衡机器人的整个系统由四个子系统组成:控制单元、姿态检测单元、驱动单元和通信单元。姿态测量单元始终监测整个机械结构的姿态信息,并将模拟物理量转换成数字电信号给控制单元。控制单元在用自平衡算法处理这些数据后控制电机的相应参数,并计算控制信号来控制电机的速度。电机驱动电路接收信号,并将小信号转换成驱动电机的电源信号(电压),使电机输出相应的速度。在旋转编码器测量之后,将速度返回到控制单元,并形成闭环控制系统。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: