基于径向基函数神经网络的预测控制与仿真毕业论文
2020-04-08 14:25:12
摘 要
预测控制从基本的工业控制中发展起来,如发电厂控制、炼油控制等。发展至今,预测控制已成功应用到化工、食品制造、汽车、航天航空、冶金、造纸等领域,如今预测控制已经是化工和一些其他领域中应用最多的多变量控制算法,几乎可以用于任何控制问题,尤其是针对操作变量和被控对象维数高且附加物理约束的系统。
本文首先阐述了预测控制的基本原理和结构,并对预测控制中一些著名的算法包括动态矩阵控制(DMC),模型算法控制(MAC),以及广义预测控制(GPC)进了简单的介绍。
然后较为系统的介绍了神经网络的发展和基本结构,并着重介绍了RBF神经网络的特点、结构与训练方法,RBF神经网络具有良好非线性函数逼近能力,且网络结构易确定、收敛速度快,BP神经网络相比有明显的优点。
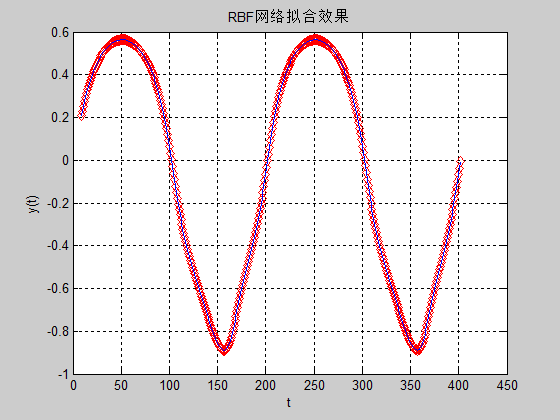
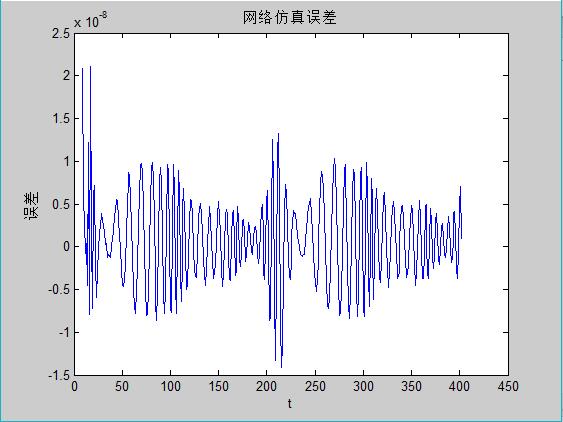
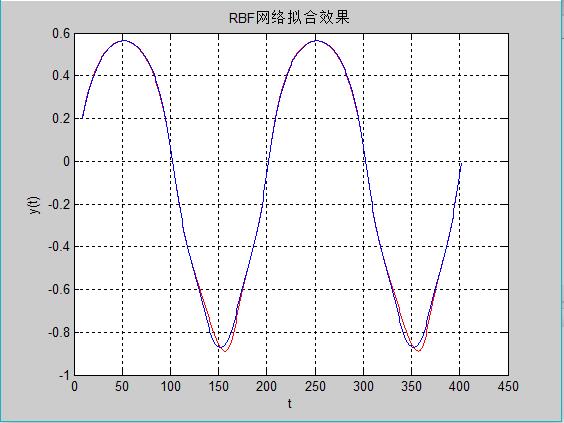
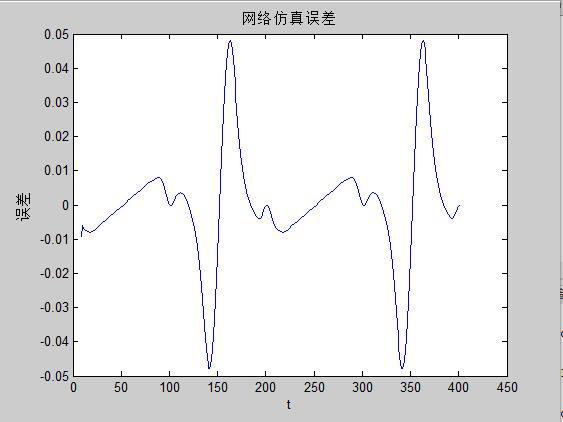
基于RBF神经网络的预测控制系统就是用RBF神经网络代替预测控制中的模型,对系统输出进行预测,并计算出控制律。为验证RBF神经网络在系统逼近方面的性能,进行了验证试验,证明了RBF网络对复杂非线性系统的良好逼近能力。
关键词:预测控制;神经网络;滚动优化
Abstract
Predictive control is developed from basic industrial control, such as power plant control, refining control, etc. So far, predictive control has been successfully applied to the fields of chemical industry, food manufacturing, automobile, aerospace, metallurgy, paper making and so on. Now, predictive control has been the most widely used multivariable control algorithm in chemical industry and some other fields. It can be used in almost any control problems, especially for operating variables and controlled objects. A system with high dimensions and additional physical constraints.
This paper first expounds the basic principle and structure of predictive control, and introduces some famous algorithms in predictive control, including dynamic matrix control (DMC), model algorithm control (MAC), and generalized predictive control (GPC).
Then the development and basic structure of neural network are introduced systematically, and the characteristics, structure and training methods of RBF neural network are introduced. The RBF neural network has good nonlinear function approximation ability, and the network structure is easy to be determined, the speed of convergence is fast, and the BP neural network has obvious advantages.
The predictive control system based on RBF neural network is to replace the model in the predictive control with RBF neural network, to predict the output of the system and to calculate the control law. In order to verify the performance of RBF neural network in system approximation, a verification experiment is carried out to demonstrate the good approximation ability of RBF neural network to complex nonlinear systems.
Keywords: predictive control; neural network; rolling optimization
目录
基于径向基函数神经网络的预测控制与仿真 1
摘要 2
Abstract 3
第一章 绪论 5
1.1 引言 5
1.2预测控制的研究进展与展望 5
1.3本文研究的目的及意义 5
1.4本文的研究内容及安排 6
第二章 预测控制的理论基础 7
2.1预测控制的基本原理与结构 7
2.2预测控制中的预测模型 8
2.3常见的预测控制算法 8
2.4本章小结 9
第三章 神经网络基础 10
3.1神经网络的发展概况 10
3.2人工神经元模型 10
3.3人工神经网络的结构 11
3.4神经网络的学习 12
3.5径向基函数网络及其学习算法 12
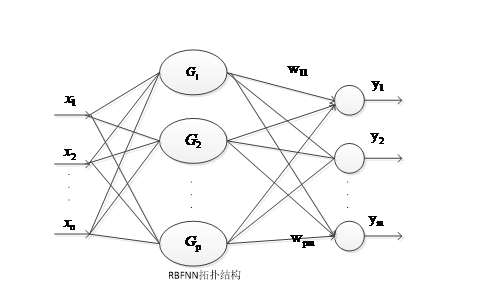
3.5.1RBF网络结构 13
3.5.2减法聚类学习算法 14
3.5.3递进最小二乘法 14
3.6本章小结 15
第四章 基于径向基函数RBF神经网络的预测控制 16
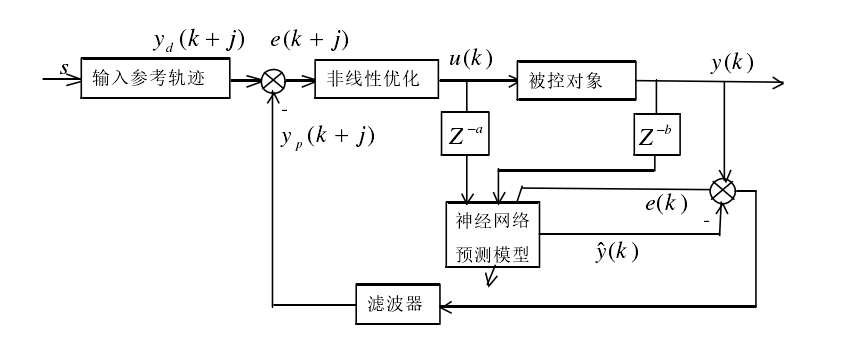
4.1神经网络预测控制基本结构 16
4.1RBF网络预测控制建模 17
4.2RBF网络预测控制优化计算 18
4.3基于RBF神经网络的控制器 18
4.4在线训练的RBF神经网络预测控制系统 19
4.5本章小结 19
第五章 仿真研究 20
5.1RBF神经网络模型辨识 20
5.2本章小结 22
第六章 总结 23
参考文献 24
第一章 绪论
引言
在上世纪70年代,工业界首先提出了预测控制的想法。提出以来,预测控制引起众多学者和研究人员的关注[1]。时至今日,预测控制以其优越的控制性能,成为了工业中应用最多的多变量控制算法。预测控制几乎可以应用于所有的控制问题,尤其是针对高维度,多变量,不稳定的时滞系统的控制。模型预测控制作为一种新兴的控制理论,能过得到广泛的认可,并受到众多工程技术人员和研究者的青睐,主要是因为一下两个原因:
1)通过滚动优化策略在线求解局部最优问题。模型预测采用局部最优的控制策略,通过预测模型对系统有限时间内的状态进行预测,优化标准并不是不变的,而是动态改变的,并通过实际输出值与预测输出进行对比,对预测模型的输出进行误差补偿,因为采取有限时间的最优控制,简化了计算过程,并且增强了系统的鲁棒性,同时采用反馈校正可以解决很多不确定性问题,包括系统干扰,模型试配等[2]。
2)直接处理约束条件的能力。与传统的控制理论相比,模型预测控制可以在保证优化指标最优的同时考虑到各种约束条件,并在线计算求解控制律。
20世纪80年代中期以来,人工神经网络越来越受到人们的关注。随着人工神经网络的应用的深化,控制界也被其独有的优势所吸引,开始尝试将其应用于各种控制问题中来,而神经网络在控制领域的优异表现充分表现了神经网络和控制系统的结合是控制科学发展的必然趋势。而基于神经网路的预测控制算法在各方的推动下得到了飞速的进展,两者的结合,为解决复杂非线性控制问题提供了新的思路。
随着预测控制在工业中的应用,至今已经衍生出多种成功的算法,其中最广为人知的有以下三种:广义预测控制(GPC)、模型算法控制(mac)以及动态矩阵控制(DMC)等。
1.2预测控制的研究进展与展望
预测控制(模型预测控制)是一种基于模型的先进控制,工业界首先提出了这一概念并成功的应用。预测控制又分为非参数模型预测控制和广义预测控制两类,前者是直接从工业生产实践中发展起来的,而后者是预测控制与自适应控制的结合解决了自适应控制在实际应用中的诸多问题。
21世纪初以来,预测控制发展十分迅速,衍生延展出了多种新算法如极点配置预测控制、前馈补偿预测控制、自适应预测控制等[3],既包括本文介绍的基于径向基函数的预测控制,并在众多行业有广泛的应用。
1.3本文研究的目的及意义
在工业环境中,由于环境、设备、人员等多因素的影响以及工业制造本身的特点问题,导致其中的控制对象多是非线性的复杂系统,且控制过程中不可控因素很多,难以准确的建立对象的模型,而传统的控制理论对模型的精度有一定的要求,在力求建立精准模型的过程中,会不断将问题复杂化,使控制系统的容错率下降,而控制逻辑和算法也会更复杂,无法满足工业生产的需求。在工业领域,对于新型控制方法的需求不断上升,而模型预测控制应运而生。模型预测控制中模型很重要,但是基于控制原理,对模型的准确地要求却很低,只需要具有一定的预测功能即可,大大简化了模型的复杂度,十分适合应用于实际工业生产中。而且相较于传统的控制理论,控制算法要更加的简洁明了,更易于工程师理解与实施,能极大满足现实生产的需求[18]。
模型在控制问题中十分重要,所以首先介绍一下模型的基本概念。模型可以分为两类,物理模型(模拟模型)和数字模型。随着计算机计算能力的提升,数字模型在系统分析中得到越来越广泛的应用,传统的经典控制理论中,对于数字模型的依赖足以说明其在控制领域的重要性,本文中的模型及指代数字模型。预测控制中的精髓在于运用控制对象的模型对对象的状态进行预测,并求解最优控制律,在传统的控制理论中也需要对控制对象进行建模,而且建模越精确控制效果也越好,但是在预测控制中,模式只要能够依据过去的信息和未来的输入来预测未来的输出即可,所以对于模型的数学表达形式没有要求。预测控制摆脱了对数学模型的依赖,以一种新的方式去解决控制问题。通过预测模型来预测不同输入引起的输出变化,并以期望输出为标准进行筛选。
区别于传统的最优控制策略,预测控制根据预测步长,根据优化指数在有点的时域内,求解控制律,优化指标是变动的,虽然只能得到全局的次优解,但是正因此相较于传统的控制策略抗干扰能力更强,鲁棒性好,能一直保持控制质量和对象的稳定,十分适合在工业生产中使用[4]。
基于神经网络的预测控制,结合神经网络和预测控制的特点,用神经网络进行状态预测,然后求解控制律,对控制对象进行控制。工业中的复杂系统很难对其进行建模和停机测试,所示将两者结合起来具有重要的理论意义和实际价值。
1.4本文的研究内容及安排
本文重点研宄基于RBF神经网络的预测控制问题。利用RBF神经网络对控制系统进行建模,并对控制算法进行分析。
为了能够对基于RBF神经网络的预测控制系统有一个清晰思路,在接下来的章节中将分别对预测控制和神经网络尤其是RBF神经网络进行了较为详实的介绍,然后再将两者进行结合,并进行相关的部分仿真工作。
第二章 预测控制的理论基础
2.1预测控制的基本原理与结构
预测控制结构十分简洁,主要包括参数输入轨迹、内部模型、反馈校正,滚动优化。控制系统内置的控制对象模型会根据控制对象的历史数据和当前输入对控制对象的输出和状态进行预测,并将预测的状态用性能指标函数进行评价,通过最小化目标函数,得到局部最优的控制律,并将第一个控制量作为系统的输入。
预测控制的基本思想可以用图2-1来表示,坐标轴第二象限中,表示过去时间中的系统输出,表示过去实践中的控制量。在第一象限中,表示系统设定的期望值,表示输出从现在的值变化到设定值得期望变化的曲线,表示根据控制对象的模型预测出的对象在未来个时刻的输出。根据期望输出和模型预测输出的误差来计算未来个时刻的控制量[5]。其中成为预测步程,称为控制步程。
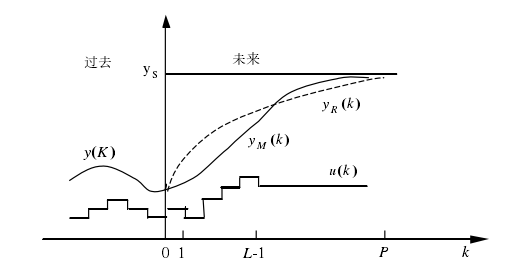
图2-1 预测控制原理示意图
预测控制的基本结构如下图所示:
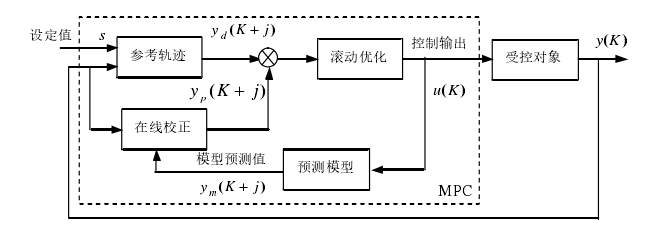
图2-2 预测控制基本结构图
1)参考轨迹:
系统的设定值有时候是阶跃的或者是变化幅度较大,这在实际控制中很容易引起系统的波动,为了避免这现象,需要对设定值进行一定的处理,使其变化程度在系统的承受范围之内,我们将设定值进行处理,分解成一条平缓的曲线,这就是参考轨迹的作用,它是根据设定值而生成的平和的曲线。
2)预测模型:
预测控制其特点就是在于是以对控制对象的状态预测为基本。其中的预测模型便是用来对控制对象进行预测的。在著名的预测控制算法中的用到的预测模型有系统的阶跃响应曲线和单位脉冲响应曲线,这些模型都十分简单,都属于非参数模型,它们分别应用于动态矩阵控制和模型算法控制中,易于得到,减去了冗杂的数据处理的过程,十分适合与解决工业中的控制问题[15]。
因为预测控制可以对系统的状态进行预测,所以可以更方便的比较不同的控制策略的控制效果,加快开发进程,节省时间。
3)滚动优化:
在由模型获得预测数据后,根据优化目标函数对网络计算获得控制律,但是与通常的离散最优控制算法不同的地方是,这个优化指标并不是全局最优,而是在预测步长内的局部最优指标,所以求解出来的控制量也是对应的局部最优控制。优化的过程需要不断的在线进行。
4)在线校正:
因为模型预测的输出和实际输出是有误差的,为了减小预测误差对控制律的求解,需要对误差进行补偿,所以采用实际输出和预测输出之间的误差对模型预测值进行修正,以求得到更为准确的预测值。其中有两种方式,一种是直接对模型进行修正,一种是建立误差模型对预测模型输出值进行修正而不对预测模型本身就行修正。分别对模型和控制实现闭环增强了系统的稳定性和抗干扰能力[6]。
2.2预测控制中的预测模型
预测控制其特点就是在于是以对控制对象的状态预测为基本。其中的预测模型便是用来对控制对象进行预测的。在著名的预测控制算法中的用到的预测模型有系统的阶跃响应曲线和单位脉冲响应曲线,这些模型都十分简单,都属于非参数模型,它们分别应用于动态矩阵控制和模型算法控制中,易于得到,减去了冗杂的数据处理的过程,十分适合与解决工业中的控制问题。预测系统中的模型只要具有预测功能就满足设计的需求,对于模型的形式没有要求,所以用于传统控制算法的模型如传递函数和状态方程都可以,一些非参数的模型也可以满足设计需求如阶跃响应和脉冲响应,当然也包括本文中的RBF神经网络。基于这样的特点,预测控制摆脱了模型对控制系统性能的限制,大大提高了控制系统的抗干扰能力,为工业控制提供了新的解决方案。
2.3常见的预测控制算法
20世纪70年代,随着工业控制对象越来越复杂,人们开始摆脱传统的控制理论的束缚,在继续着传统控制理论研究的同时,试图为工业生产提供更加有力的新型控制算法。动态矩阵控制(Dynamic Matrix Control,DMC)和模型算法控制(Model Algorithmic Control,MAC),应运而生,在解决诸多控制问题的过程中体现出了更为良好的性能[17]。
这两种算法分别基于不同非参数模型,动态矩阵控制和模型算法控制分别出使用阶跃响应和脉冲响应为系统的预测模型,而这两种模型本身就是具有相关性的。就早期的算法而言,动态矩阵控制优于模型算法控制的地方是在消除稳态余差方面的有效性,但是随着40年的发展,早已就不足进行了改善[8]。
随后出现的广义预测控制理论是以自校正为基础,结合预测看控制控制后产生的。因此具有自校正和预测控制两种算法的特点,保留了自校正系统对在线模型修正的特点并结合了预测控制滚动优化的控制策略[9]。就这点相比较而言,动态矩阵控制和模型算法控制的预测模型是不变的,但是会用误差模型来修正预测值,来减小预测模型的误差。
2.4本章小结
本章对预测控制的原理以及三种经典的预测控制算法进行了简单的介绍,为之后的章节奠定基础。
第三章 神经网络基础
3.1神经网络的发展概况
神经网络经过20世纪40的万众瞩目,70年代的发展不顺到80年代的重新认识,经历了几番波折,神经网络虽然没有发展出像一个人一样的智能出来(各个方面都像)但是随着神经网络在各行各业的应用,现在社会已经越来越离不开它[14]。
1943年,美国神经生理学家Warren Mcculloch和数学家Walter Pitts发表文章“A Logical Calculus of Ideas Immanent in Nervous Activity”。结合脑神经的生理结构和信号传递方式,他们用电路搭建了简单的人工神经网络模型,试图去实现神经网络的功能,并且指出大脑的所有功能最终都可以被分析被解释。该文开拓新的指出了大脑工作的关键,提出了沿用至今的神经网络模型,是具有开创新的工作。
1957年,计算机专家Frank Rosenblatt开始研究一种多层的神经网络,并成功用硬件实现了,称为感知器,通常被认为是最早的人造神经网络模型。这是第一次神经网络应用于实践问题,随后诸多实验室开始仿照感知器,将其运用到很多领域,并得到不错的成效。
1959年,Bernard Widrow和Marcian Haff在合著论文“Adaptive Switching Circuits”中提出了一种新的网络模型,自适应线性单元。在论文中对网络的的结构、原理、学习算法进行了详细的介绍,是第一个用于解决实际问题的神经网络,可用于通信滤波和天气预报。
20世纪80年代初,符号学派依靠专家系统,智能推理机让人工智能迎来了第二春,但是属于对立阵营的神经网络却并没有什么起色,随后便是长达20年的第二次寒冬,直到2012年,由欣顿教授和其学生重新描述和包装的“深度学习”才彻底扭转了这种局面,掀起了一波深度学习神经网络的热潮[15]。
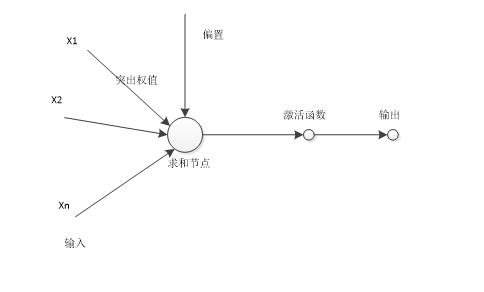
3.2人工神经元模型
仿照人脑神经网络的结构,人工神经网络的基本处理单元也是神经元,但是更像是经过简化的生物神经元,采用多输入单输出的方式进行的信号输入,处理,输出
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: