利用扰动补偿改进的卫星姿态控制外文翻译资料
2022-12-07 16:19:25
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
利用扰动补偿改进的卫星姿态控制
Toshiaki Yamashitaa, Naoto Ogurab, Toshihiro Kuriib
Tatsuaki Hashimotoc
aGuidance and Electro-Optics Division, NEC Corporation, 1-10 Nisshin-cho, Fuchu, Tokyo
bSpace Systems Division, NEC TOSHIBA Space Systems, Ltd., 4035 Ikebe-cho, Tsuzuki-ku, Yokohama, Kanagawa 224-8555, Japan
cJapan Aerospace Exploration Agency, 3-1-1 Yoshinodai, Sagamihara, Kanagawa 229-8510, Japan
摘要:干扰补偿姿态控制算法已被用于开发三轴控制卫星的柔性附件。它由一个补偿器的稳定系统(例如,PD控制),一个防止激励被忽略的高弹性模振动的过滤器(例如,低通滤波器),以及一个抑制卫星姿态干扰影响的补偿器组成。这种干扰补偿可以在鲁棒模型匹配设计方法的频域领域中使用,也可以用于观察者/推定方法的时间领域。这种特殊设计的补偿器可以轻易实现对常规的姿态控制系统的控制。理论上,干扰补偿器确保任何频率范围干扰下的低灵敏度不仅是由于环境,也因为他的结构灵活性使得参考输入能起到控制性能。因此,控制算法可以通过柔和结构改善卫星的控制性能。它应用于在1997年2月12日发射的日本VLBI卫星“HALCA”的姿态控制系统中。
- 引言
大多数三轴控制的卫星有几种柔性结构,如太阳能阵列附属物和数据发送天线。另一方面,近期卫星的任务也日益多样化,姿态控制的要求也越来越严格,特别是天文观测的任务。因此,姿态控制算法必须允许卫星动力学稳定性的修改和基于动态效果的结构灵活性的性能。一些姿态控制学家已经提出了将柔性附属物用于三轴控制卫星,然而,这些控制概念涉及多种限制。在一些情况下,很多致动器和传感器,有必要将振动控制对应于许多相关柔性模块。在另一些情况下,高性能的执行器被假定为了控制系统的用途。在轨道中,在对结构稳健性和非结构化的不确定性的强烈需求下,Hinfin;= - 合成最近已应用到卫星的姿态控制设计的柔性结构中。特别是,一些姿态控制算法的基础上,鲁棒控制理论,已经提出哈勃太空望远镜(HST)[3-5] Hinfin;= - 合成控制的设计是一个回路整形,它满足了频域方法期望的性能和鲁棒性的规格对未建模动态(非结构化的不确定性)和结构参数的不确定性。在使用Hinfin;的设计方法时,加权函数被施加到的控制系统的某些输出;即,这些加权函数指定所需的系统性能和鲁棒性在频域,和所述控制器被设计成在时域的时候使用状态空间模型。为了获得一个控制器,实现闭环规格由Hinfin;范描述,可以使用一些数值计算软件包求解两个代数Riccati方程(ARE)或线性矩阵不等式(LMI),虽然大多数控制工程师都在控制性能的选择权资格功能上遇到过困难。此外,如果Hinfin;控制理论是适用于涉及柔性结构实际卫星,则所获得的解决方案/控制器往往是高位整理,同时,控制器需要需要进行技术顺序的还原。
本文介绍了一种姿态控制算法利用该扰动补偿器,它可以很容易在实际的姿态控制系统中实现具有柔性结构的卫星。一种姿态控制器利用扰动观测器中可以参考[6],但是在频域,我们利用鲁棒模型匹配(RMM)的方法为一、二阶系统设计了一个干扰补偿器(即,卫星的刚体动力学)。我们通过估算其在太空环境下振动的干扰、柔性结构的衰减效应、还有其控制稳态干扰的能力和参数发生的变化设计了补偿。它实现了在轨道上观察甚长基线干涉测量(VLBI)的日本卫星HALCA的姿态控制。我们讨论过卫星姿态控制器的扰动补偿器的设计方法应用和控制器针对空间环境和通过数值模拟、缩放的HALCA硬件模型的动态闭环测试实验得到的结构灵活性干扰的控制性能展示的一些问题。
- 传统卫星姿态调节器的问题
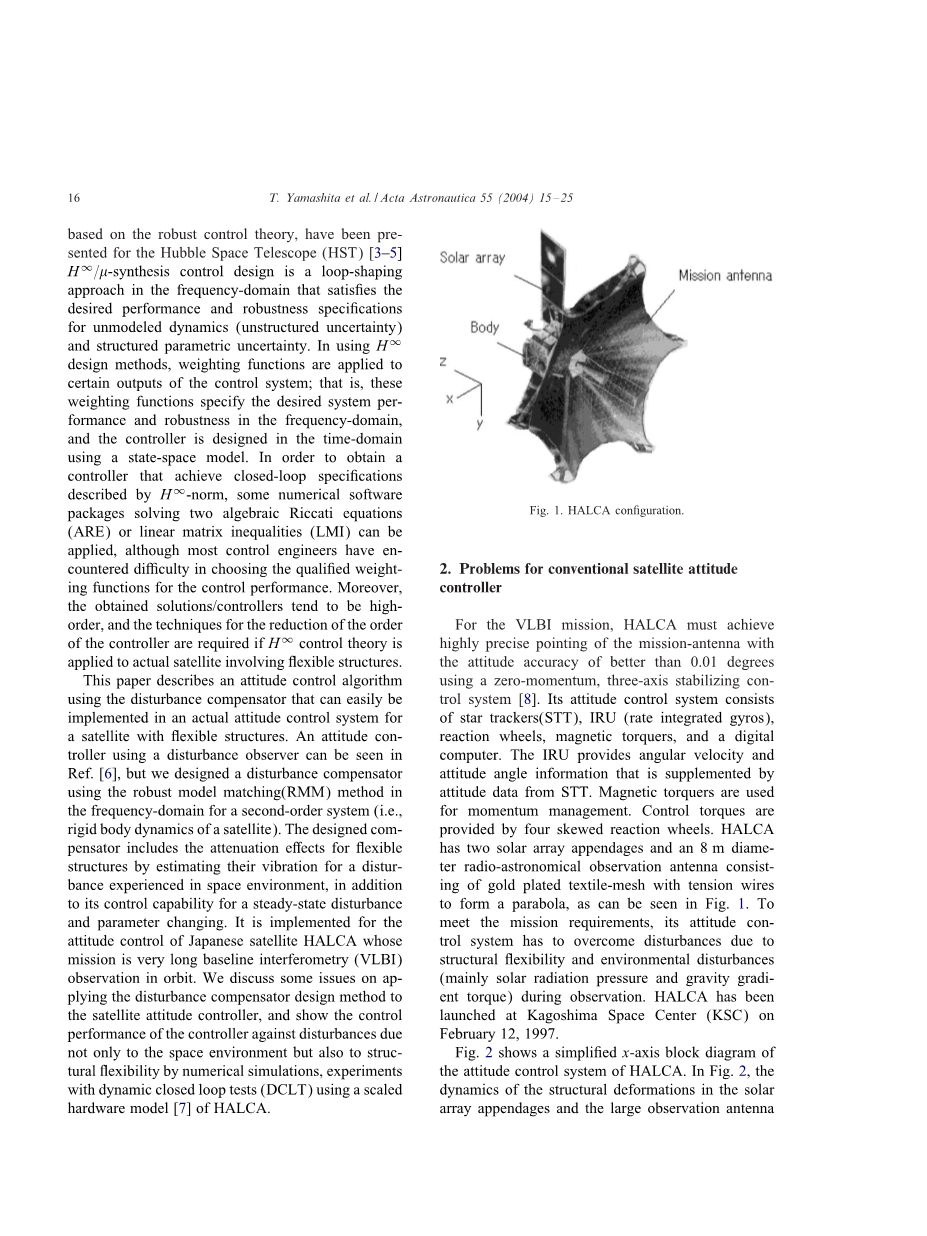
对于VLBI任务,HALCA的的任务天线必须达到使用零势头、三轴稳定控制系统[8]且优于0.01度的姿态精度的高精确定点。它的姿态控制系统由中星跟踪器(STT),国际公路运输联盟(速率陀螺仪集成)反应车轮,磁扭矩装置,和一个数字电脑组成。国际公路运输联盟提供角速度和从STT姿态数据补充姿态角信息。磁性扭矩装置使用动量管理。控制扭矩为由四个倾斜的反应车轮提供。HALCA有两个太阳能电池阵列附属物和一个直径8米、由镀金纺织网张力线组成的无线电天文观测的天线以形成抛物线,如图1所示。在观察期间,为了满足任务要求,它的姿态控制系统具有克服由于扰动结构的灵活性和环境干扰(主要是太阳辐射压力和重力梯度扭矩)。HALCA已经在1997年2月12日于上鹿儿岛航天中心(KSC)发射升空。
图2示出的简化x轴框图HALCA的姿态控制系统。在图2中,在太阳能的结构变形的动力学阵列附属物和大观察天线在约束模式的形式表示(或附属物模式);IO=1649.6kg/m2是卫星转动惯量,S是拉普拉斯变换变量,是第i个“模态角动量系数,是第i个灵活模式频率,是被动阻尼比,假定在最坏的情况下,为0.001,=0.7和=50.27显示IRU动态特征,是一个典型的系统延时模型(即,包含在总时间延迟速度/角度传感器,对当地的控制回路致动器,并与计算延迟采样/零阶保持)和是一个反应可以通过给予车轮动态模型
其中,,(标称值),和(估计值)。表1给出的数值对于模态频率和模式增益的附属物模式中,从第一至第七,对围绕HALCA其x轴的姿态运动。船上HALCA常规的控制逻辑包括一个比例 - 积分 - 导数(PID)控制器的,和,和结构滤波器为设计,以减少激励中被忽视的更高的结构模式。一个常规的控制装置的方框图显示在图3。过滤器,我们应用三阶低通滤波器,称作切比雪夫型滤波器。
(2)
其中,的截止频率为0.286赫兹。
此外,积分补偿器写为被添加到控制器,以改变车轮动态模型到一个简单的低通滤波器,动态,
(3)
HALCA的其它轴采用相同的控制建筑。
为了获得开环的频率响应从基准传输功能的姿态角,我们使用一个三阶PadPe线性逼近为时间延迟模型与50的(20赫兹)延迟假定采样/零阶保持,和线性化的控制系统图 2。
频率响应示于图 4。如可以看到的在图4的波特幅度,带宽控制是0.008赫兹参考输入。此带宽通常是基于对干扰的响应要求,但它受到灵活的结构特性的限制,因为这些结构的稳健性在实际的卫星姿态控制系统使用中特别需要。
图5示出卫星的干扰的响应姿态角和太阳能电池阵列的第一模式值使用传统的PID控制器。在图5中,一个恒定步骤扭矩,-0.001,被施加到卫星身体的干扰。为了提供针对灵活的模型不确定性鲁棒性结构,这些结构稳定增益是由传统控制器(图4)来实现,而太阳能电池阵列的激发第一振动模式附属物可逐渐衰减。但是,对于控制性能的干扰不足以天文观测任务。因此,带有柔性结构的三轴控制卫星需要一个全新的姿态控制算法,以提高干扰响应,同时维持系统的稳定性。
- 姿态控制算法在扰动补偿器中的应用
我们已经开发出一种新的姿态控制算法使用一个干扰补偿器,以提高对于带有柔性结构的卫星的姿态控制性能。该控制算法是由三个部分组成:一个补偿器,以稳定系统,滤波器,以防止忽略的更高柔性模式振动的激励,和一个干扰补偿器以抵消对姿态运动干扰的影响。尤其是,干扰补偿可以使用一下两种方法的任意一种来设计:频域中的RMM方法,时域中的观察者/推定方法。在设计扰动补偿的时候,我们使用二阶系统作为一个单轴卫星的标称模型。因为该模型简单,补偿器可以变成现有的卫星系统可以接受的低阶系统。它可以处理柔性结构和轴间的影响耦合对卫星身体等同于环境扰动扭矩Q,并在一个实际的飞行中描述模态参数未知的变化。在本节的前半部分,我们讨论这些扰动补偿器的卫星姿态控制的两种设计方法。在后半部分中,我们提出使用一种新的姿态控制算法干扰补偿器,和展示使用HALCA的姿态控制系统显示的激励,与常规PID控制相比较的测试结果。
3.1鲁棒模型匹配(RMM)
RMM是一个线性系统结构参数不确定性的设计方法[9]。RMM原则是基于严格的或近似的概念从等效的传递函数零点干扰到输出。等效干扰是代表概念性信号状态变量参数变化的影响。RMM可以保证任意低灵敏度、任意频率范围内,从基准分离输入响应。补偿器产生等效扰动和一个输出取消信号为q,使用逆传递函数从广义的干扰q去观测这是的图 6,其中,为q的观察者,是一个归零元件使得传递函数远离干扰q要输出y严格零和是一个过滤器,被称为“鲁棒过滤”,这使得正确。在RMM伺服系统,在下一个途径可以实现
(4)
其中是传递函数得自q到y现有伺服系统,即,该控制系统无干扰补偿器。理想的情况下,期望 任何有限的频率范围内被设置为1使得为0,但大量带宽滤波器需要大增益参数,使系统不稳定。因此,我们要注意的设计补偿时 的带宽。
在应用RMM中,我们设计了一个扰动补偿的单轴卫星模型,如图7所示。在该图中,是的卫星时刻惯性是姿态角,是态度率,q是广义扰动转矩,是一个反应轮动力学模型,是一个总的控制系统的时间延迟模型,包括率/角度传感器,致动器局部控制回路,该计算和采样延迟。等效扰动扭矩值表示q如图 7所示可以被描述如下:
(5)
然后,干扰抑制控制扭矩可以如下获得:
(6)
该控制扭矩是致动器的输出形式。因此,控制输出命令可从方程导出(6),使用和时间延迟型号
(7)
当
(8)
这里,我们介绍一个强大的过滤器,这使得扰动补偿严格正确,并确定其干扰抑制器的带宽,以等式(7),并能获得干扰补偿器发成如下:
(9)
因为这个补偿公式(9)被设计为卫星刚体模型(即,灵活的模式是没有明确包含在名义模型)时,它可能治疗柔性结构的作为扰动的影响,而且,可以预期可用于参数健壮变化的柔性结构。
在等式(9),包括了和必须是线性最小相位模型如图方程(1)和(3),一个反应轮模型或可以表示为一个线性最小相位模型。但是Pade逼近,通常用于延时模型的,被表示为一个非最小相位的模式,其逆有不稳定极点。因此,我们认为等式(9)被设计的过滤器,并应用近似多项式为如下:
(10)
其中a0,A1,A2,......是恒定参数,并且的顺序确定使等式(9)严格正确。鲁棒过滤器中具有重要作用在扰动补偿器的性能,因为干扰控制带宽可以通过的带宽直接决定。的参数必须根据系统的动态进行调整。
例如,我们设计的扰动补偿使用反作用轮模型积分补偿如式(3)为和二阶Pade近似的。然后为可被描述如下:
(11)
为了使公式(9)的补偿严格正确的,我们选择的为:
(12)
其中,,为设计参数。
因此,干扰补偿可表示如下:
(13)
当
(14)
并且是系统时间延迟的最坏的值。接着,为了简化系统,假定
(15)
和替代式(15)代入式(9)。当我们选择二阶低通滤波器,(然后,和是设计参数),所述补偿器被赋予通过
(16)
3.2 观察/估计方法
相同的干扰补偿可以被设计对于图7的模型,即使当观察者/使用方法估计为了简化该系统,我们假设方程(15)是有效的。对于单轴卫星模型,我们可以得到一状态方程,如下:
(17)
在这里我们假设为常数的干扰,即,。
通过设计适当观测器的不断收益,随时间变化的广义的实际值在扰动转矩将继续进行估算。换言之,参数实际上表示的在一个有限的时间间隔的近似。
该系统的最小阶观测可采用纳思规范形式所获得:
(18)
其中,和是在本设计参数观测器。
然后,获得所估计的扰动转矩如方程(18)为
(19)
因此,干扰补偿器可以描述如
(20)
观察者增益及是自由参数,并如果我们选择它们作为
(21)
(22)
我们可以得到完全相同的扰动补偿如等式(16)衍生出RMM。当反应轮模型方程(1)时,我们也可以由式(20)获得相同的补偿器如等式(13)由相乘
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[31728],资料为PDF文档或Word文档,PDF文档可免费转换为Word



