状态反馈控制器设计 具有时间的网络控制系统 延迟和丢包?外文翻译资料
2022-11-06 11:41:02

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
状态反馈控制器设计
具有时间的网络控制系统
延迟和丢包?
李宏博 孙增圻 周莫玄 陈巴东
国家计算机科学与技术系
智能技术与系统重点实验室
清华大学,北京,中国,100084
(电子邮件: Hb-li04@mails.tsinghua.edu.cn)
北卡罗莱纳州立大学电机与计算机工程系
罗利,NC 27695-7911,USA.
(电子邮件: chow@ncsu.edu)
摘要:本文对网络控制系统的稳定性分析和综合问题(NCSS)的影响。通过引入到网络控制系统的提升技术,一种新的离散开关模型具有时延和数据包丢失的数据包在传输过程中的思考。它描述了网络控制系统作为一个开关系统,从而使我们能够把理论应用于开关系统研究离散时间系统。在给定的模型,给出了状态反馈控制器使得闭环系统渐近稳定的充分条件存在。基于所获得的稳定性条件,同伦为基础的迭代LMI算法得到的状态反馈增益。仿真结果证明所提出的方法的有效性。
1 简介
网络控制系统(NCS)的通信网络进行分布式系统组件之间的连接,最近引起了研究界的关注。某些问题,如网络引起的延迟(尼尔森等。[ 1998 ],胡等。[ 2003 ]、Tipsuwan等人。[ 2004 ],刘等。[ 2006 ],张等人。[2001]:数据包丢失(张等人。[ 2001 ],熊等。[ 2007 ]),网络的限制(montestruque等人。[ 2003 ],彼得等人。【2003】:信号量化(Li等)。[ 2004 ],montestruque等人。[ 2007 ])和调度(沃尔什等)。[ 2001 ],进行了调查,并报告了一些有用的结果。此外,由于成本低,安装简单,可靠性高的优点(熊等。[ 2007 ],岳等。[ 2004 ]),NCSs已在DC找到汽车应用(刘等人[ 2006 ]),车辆(塞勒等人。[ 2005 ])和机器人(tipsuwan等人。[ 2003 ]等。
在实践中,对于网络诱导时延和丢包是一个非常有趣的和实际中存在的问题,从数据包通常遭受网络诱导时延和数据包丢失的同时,在网络传输的网络控制系统控制器的设计。最近,一些重要的结果,在这一领域的发展。基于LMI方法,状态反馈控制方法进行了研究等,[ 2004 ]和宇等。[ 2004 ]分别。在H1控制的情况下,乐等。[2005]研究了具有外部扰动和参数不确定性的NCS控制器设计问题。请注意,这些研究结果在连续时间域系统。离散时间域,禹等人[ 2004 ]和林等人。[ 2005 ]研究了网络控制系统的镇定问题。然而,在这些结果中,控制器和致动器组合在一起。这意味着网络只存在于传感器和控制器之间。熊等人[ 2007 ]研究了状态反馈控制系统的一个总体框架下。然而,它假定网络诱导的延迟是恒定的,因此不能处理的情况下,当网络诱导的延迟是随机的。因此,尽管对于具有网络诱导时延和丢包的网络控制系统的控制器设计方面取得的进展,它已成为明显的,在离散时间域的网络控制系统的状态反馈控制,特别是对系统的总体框架下,与随机网络诱导时延,仍然需要。
在本文中,我们重点解决的状态反馈控制器的设计问题,在离散时间域和一般框架下的网络控制系统,在随机网络诱导时延和数据包丢失的任意同时考虑。利用提升技术(见李等)。[ 2002 ],公园等。[ 2004 ]),一个数学模型所考虑的网络控制系统。它描述了网络控制系统作为一个开关系统,从而使我们能够把理论应用于开关系统研究离散时间系统。在给定的模型方面,我们给予足够
对于状态反馈控制器,使得闭环系统渐近稳定的存在条件。基于获得的稳定性条件,我们进一步研究了相应的状态反馈控制器设计问题。数值例子证明所提出的方法的有效性。
在本文中,氡和氡times;M表示n维欧氏空间和N的所有times;M实矩阵分别设定。ǁ·ǁ指Euclidean向量和矩阵范数诱导范数。上标“T”表示矩阵转置;对于对称矩阵x和y,符号x y表示X-Y正定。我是具有适当维数的恒等矩阵,符号Z表示为非负整数集。最后,在对称块矩阵,我们使用“*”作为一个省略的条款引入对称。
2 问题的规划
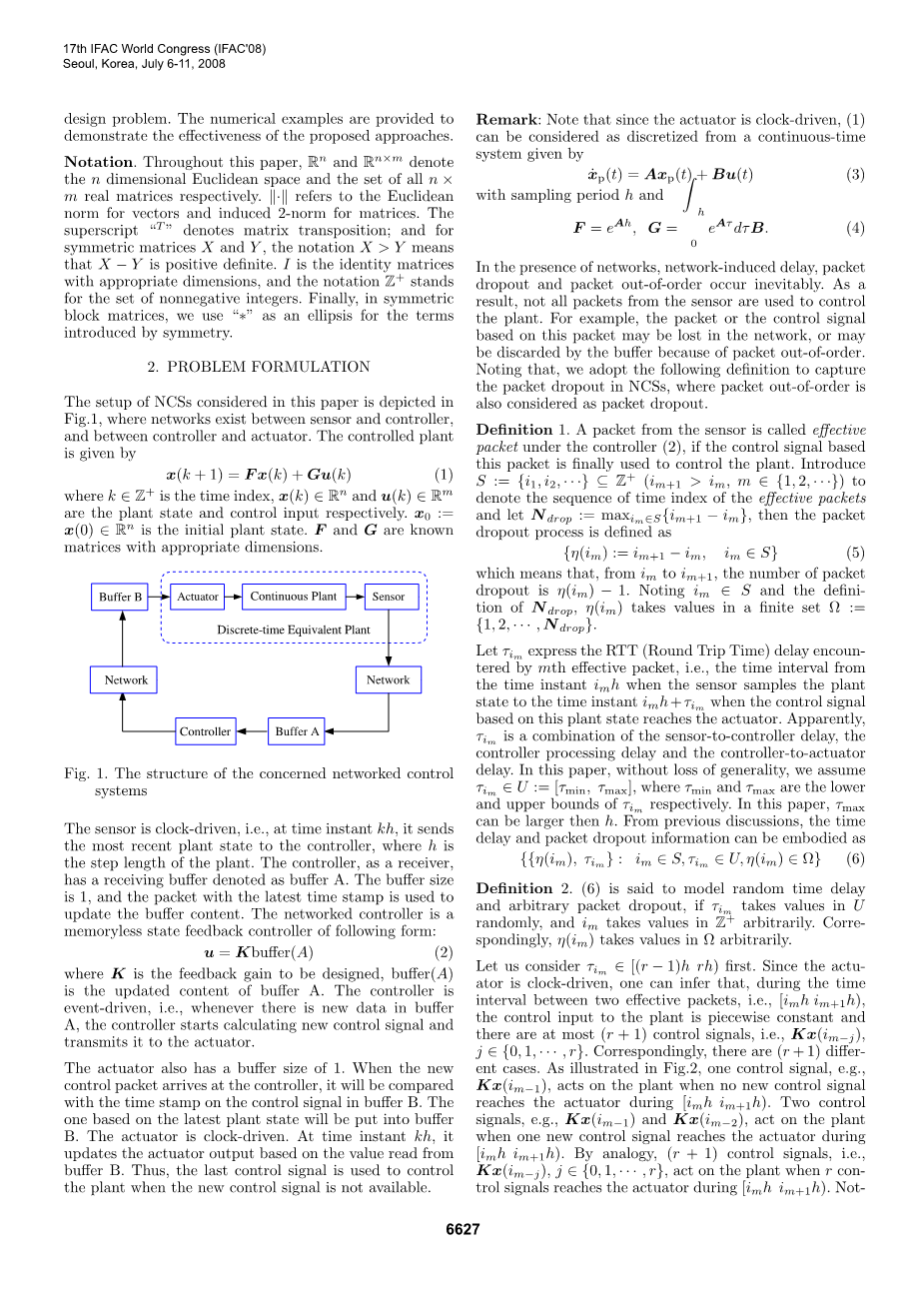
网络控制系统在本文中考虑设置在图1所示,在网络存在的传感器与控制器之间、控制器和执行器之间。受控工厂是由
x(k 1) = Fx(k) Gu(k) (1)
其中Kisin;Z 是时间指数,x(k)isin;Rn和u(k)isin;Rm是植物状态和控制输入的分别。x0 :=x(0)isin;Rn是初始植物状态。F和G是已知的适当尺寸矩阵。
图1 有关网络控制系统的结构
传感器时钟驱动的,即,在时刻KH,它将最新的植物状态的控制器,其中h是植物的步长。控制器,作为接收器,接收缓冲区表示为缓冲区。缓冲区大小为1,带最新时间戳的数据包用于更新缓冲区内容。网络控制器是一种无记忆状态反馈控制器的以下形式:
u = Kbuffer(A) (2)
其中k是要设计的反馈增益,缓冲区(a)是更新的内容的缓冲A.控制器是事件驱动的,即每当有新的数据缓冲区控制器开始计算新的控制信号并传送给执行器。
该致动器还具有一个缓冲区大小为1。当新的控制数据包到达控制器时,它会与缓冲区B中的控制信号的时间戳进行比较。根据最新的工厂状态将一个被放入缓冲区。在时刻KH,它更新基于缓冲B.从而读取值,执行机构的输出,最后控制信号用于控制植物在新的控制信号不可用。
注意,由于执行器是时钟驱动的,(1)可以被认为是离散的连续时间系统给出
ẋp(t) = Axp(t) Bu(t) (3)
采样周期H和
F = eAh, G =B. (4)
在网络的存在下,网络引起的延迟,丢包和数据包乱序不可避免地发生。其结果是,不是所有的数据包从传感器被用来控制植物。例如,基于该分组的分组或控制信号可能会丢失在网络中,或者由于包的乱序而被缓冲区丢弃。注意的是,我们采取以下定义捕捉NCSs的丢包,数据包的顺序也被认为是数据包丢失。
定义1 从传感器的数据包被称为有效的数据包的控制器(2)下,如果基于该数据包的控制信号,最终用于控制植物。S := {i1, i2, ···}Z (im 1 gt; im, m{1, 2,···})表示的有效数据包时间指数序列,让Ndrop := maximS{im 1-im},然后丢包过程的定义为
{ƞ(im) := im 1-im,imS} (5)
这意味着,从 im t到 im 1,丢包数ƞ(im)-1。注意到im S和Ndrop的定义,ƞ(im)值在一个有限的集合Omega;:={1,2,···, Ndrop}。
tau;im表达RTT(往返时间)的MTH有效分组,即遇到延迟,从即时imh 当传感器样品的时间间隔的植状态的时刻imh tau;im当基于这种植物状态的控制信号到驱动器。显然,tau;im是一个组合的传感器到控制器的时延控制器处理时延和控制器到执行器的时延。在本文中,不失一般性,我们假设tau;imU := [tau;min, tau;max],在tau;min 和 tau;max上、下限分别tau;im。在本文中,tau;max可以大于H从以前的讨论中,时间延迟和丢包信息可以
{{ƞ(im), tau;im} : imS, tau;imU, ƞ(im)Omega;} (6)
定义2 (6)表示模型的随机时延和数据包丢失的tau;任意,如果tau;im在你随机取值,tau;im以Z 任意。相应地,ƞ(im)的值在Omega;任意。
让我们考虑 tau;im[(r-1)h rh)第一。由于执行器时钟驱动,可以推断,在时间间隔两个有效的数据包,即,[imh im 1h),控制输入到植物是分段常数和最多的有(r 1)的控制信号,即Kx(im-j),j{0,1,··· r}。相应地,有(r 1)不同的情况下。如图所示,一个控制信号,例如,Kx(im-1),作用于植物时,没有新的控制信号达到致动器在[imh im 1h)。两个控制信号,例如,Kx(im-1) 和Kx(im-2),作用于植物时,一种新的控制信号达到致动器在[imh im 1h)。通过类推,(r 1)控制信号,即Kx(im-j ), j{0, 1,···, r},法当R控制信号到达执行器在 [imh im 1h)。注意随机时延和丢包发生在任意网络和考虑tau;im[(r-1)h rh),可以推断出控制信号Kx(im)可以只在瞬间imh rh装置的控制,以及其他的控制信号,即Kx(im-j ), j{1,···, r},可以用来在任意时刻imh h工厂控制,其中 {0,···r-1}, n{1,···,r}。对于i,j{1,···, r}有
gt; i gt; j, ne;r-1
= i gt; j,= r-1 (7)
图2 有关网络控制系统的时序图
参考[imh im 1h]作为一个“解除采样周期”,那么有关NCS可以解除
注意在tau;im[(r-1)h rh),NCS可以模型(8)r的[tau;im=h]取代,在 [·]表示最近的大一些。让Ndelay := [tau;max/h]。那么可以推断,不超过(Ndelay 1)的控制信号,即Kx(im-j),j{0,1,···Ndelay},可在 [imh im 1h)。为了方便网络控制系统的稳定性分析,介绍z(im) =[ ··· ]T 为闭环网络控制系统模型,即,(8)r的[tau;im/h]。然后,闭环网络控制系统可以用下面的开关系统
z(im 1) =M[tau;im/h]z(im) (10)
M[tau;im/h] 的[tau;im/h]开关/小时以值的有限集合中的函数S := {1, ···Ndelay}。对于[tau;im/h]= r的每个可能值,先生是以下形式
在(11)中,给出 and (i{3,···r 1})
如果r lt; Ndelay,有(11),我们也有
=0 (i{r 2,···Ndelay 1} (13)
本文的目的是研究网络控制系统的稳定性和控制器设计问题(10),考虑系统渐近稳定。
3 闭环网络控制系统的稳定性分析
在本节中,我们将给出状态反馈控制器使得闭环系统渐近稳定的充分条件存在。
没有损失,我们假设的初始控制输入为零,即 u(0) = 0。注意最后一个控制信号用于控制植物在新的控制信号不可用,我们有u(l) = 0 for 0le;lle;i1,其中i1是第一个有效的数据包的时间指数。与最初的植物状态x0 :=
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139561],资料为PDF文档或Word文档,PDF文档可免费转换为Word



