自动车辆变道行为建模策略:一种有监督的机器学习方式外文翻译资料
2021-12-15 22:38:55

英语原文共 6 页
自动车辆变道行为建模策略:一种有监督的机器学习方式
摘 要:
近年来,由于人们对自动驾驶的兴趣日益浓厚,对人类驾驶行为尤其是变道和追车行为认识的必要进一步加深。尽管变道具有重要的意义,但它还没有像纵向行为那样得到广泛的研究,仍然是最具挑战性的问题之一。驾驶行为的机动是为了理解和预测。驾驶员在进行决策时要考虑许多因素,这是不能被传统的基于规则的模型所反映的。在本文中,我们比较了不同监督机器学习分类器的结果,以更好地理解使用NGSIM数据库的驾驶员变道决策。为此,在选择相关特征后,通过特征重要性分析,选择对模型贡献最大的特征。然后利用训练数据集对模型进行朴素贝叶斯、支持向量机、逻辑回归、近邻、决策树、额外树和随机森林分类器测试。测试数据集的预测精度表明,额外树、决策树和随机森林分类器对人类驾驶员变道决策的预测效果最好。
关键词:变道;机器学习;大数据
1引言
由于变道过程会使驾驶员的工作负荷和压力增加,它会对交通安全和交通流特性产生不利影响。因此,将变道行为交给车辆并自动执行的方式具有减少交通冲突、提高交通安全效率的潜力。最大的挑战之一是在战术层面上实现行为规划的自动化。从时间分解的角度来看,驾驶员的行为可以分为三类:操作型、战术型和战略型。战术行为包括在几秒钟内做出的决策,而操作决策是在几分之一秒内做出的,战略决策是在几分钟到几小时的时间内做出的。战术行为必须考虑当前的驾驶情况,处理与道路和其他道路使用者的互动相关的选择和行动。战术行为规划任务之一是决策,如变道,或在交叉路口执行左转机动。自动驾驶车辆的变道策略和战术行为仍然是其设计中最具挑战性的任务之一。通过改变自动驾驶车辆的驾驶策略参数,可以实现不同的战术驾驶行为。然而,如何开发出既安全又能被社会接受的变道机动行为和驾驶策略仍然是一个挑战。为了培养符合社会规范的战术行为,需要更好地理解和预测驾驶员的变道行为。因此,本研究比较了不同分类器在预测变道行为(仅对左侧变道)方面的性能。
本文的其余部分结构如下:第二部分给出了变道战术行为的一些背景。第三节给出了数据库中的数据结构。然后是特征选择和特征重要性分析。第四节给出了不同分类器的交叉验证结果和准确性。最后,第五部分总结了本文的研究结论和未来的研究方向。
2背景
Michon[1]定义了驾驶任务的三个不同层次:战略层面、战术层面和控制层面。本研究的重点是战术行为。变道过程中的决策是最具挑战性的任务之一。从下图中可以看出,ego vehicle通过对包括周围车辆在内的情境的解读来决定变道行为的可行性。
图 1 现有变道行为的示例
A相关工作
对于变道建模,研究人员采用了不同的方法。用于变道的第一种建模方法是基于规则的模型。由Gipps [2]、Ahmed [3,4]、Hidas等人开发的模型、[6]、Salvucci等人的[7]就是基于规则的模型的例子。Toledo 等人[8]开发了一个包含两个步骤的模型:目标车道的选择和间隙接受理论。由Kesting[9]开发的变道模型MOBIL不仅考虑了给定车道的吸引力,还考虑了变道机动带来的不适。尽管在变道建模方面做了大量的工作,但是这些基于规则的模型大多是确定性的,即使是那些具有随机性的模型,也不能准确地对不同驾驶情况下的人类行为进行建模。
为了解决传统规则模型的局限性,近年来人工智能方法被采用。在[10]中,作者提出了一种博弈论方法,通过预测离散期望车道序列和连续加速度来最小化代价函数。Talebpour等人[11]提出了一种基于博弈论的关联环境下车辆变道行为建模方法。其他一些研究使用神经网络模型[12,13]或基于模糊逻辑的模型[14]。
机器学习算法已经被广泛应用于不同的学科中来理解和模拟人类的行为。在采用基于特征的方法中[15],利用最大熵预测机器人的步行轨迹。在[16]中,作者提出了一种从示例中学习多个交互代理的复合行为的方法。在他们的研究中,使用哈密顿马尔可夫链模型来研究行人的行为。在[17]中,研究人员根据成本函数对高速公路上的个人驾驶风格进行建模,并使用基于特征的反强化学习来寻找最适合所观察到的驾驶风格的特征。在[18]中开发了一种用于对实际导航和驾驶行为建模的技术,其中收集的数据本质上是不完美的。在[19]和[20]中,作者使用了datadriven方法(局部回归方法)来建模汽车的跟随模型。一些研究使用机器学习算法来理解、分析和建模决策过程[21],并使用不同的分类器(朴素贝叶斯和决策树[22],回归树[23])来预测驾驶员的行为。
尽管用于建模驾驶行为的机器学习方法多种多样,但有必要对各种方法的准确性进行比较研究。据我们所知,本文是首次尝试比较不同分类器在变道机动战术行为建模决策中的准确性。
3数据组
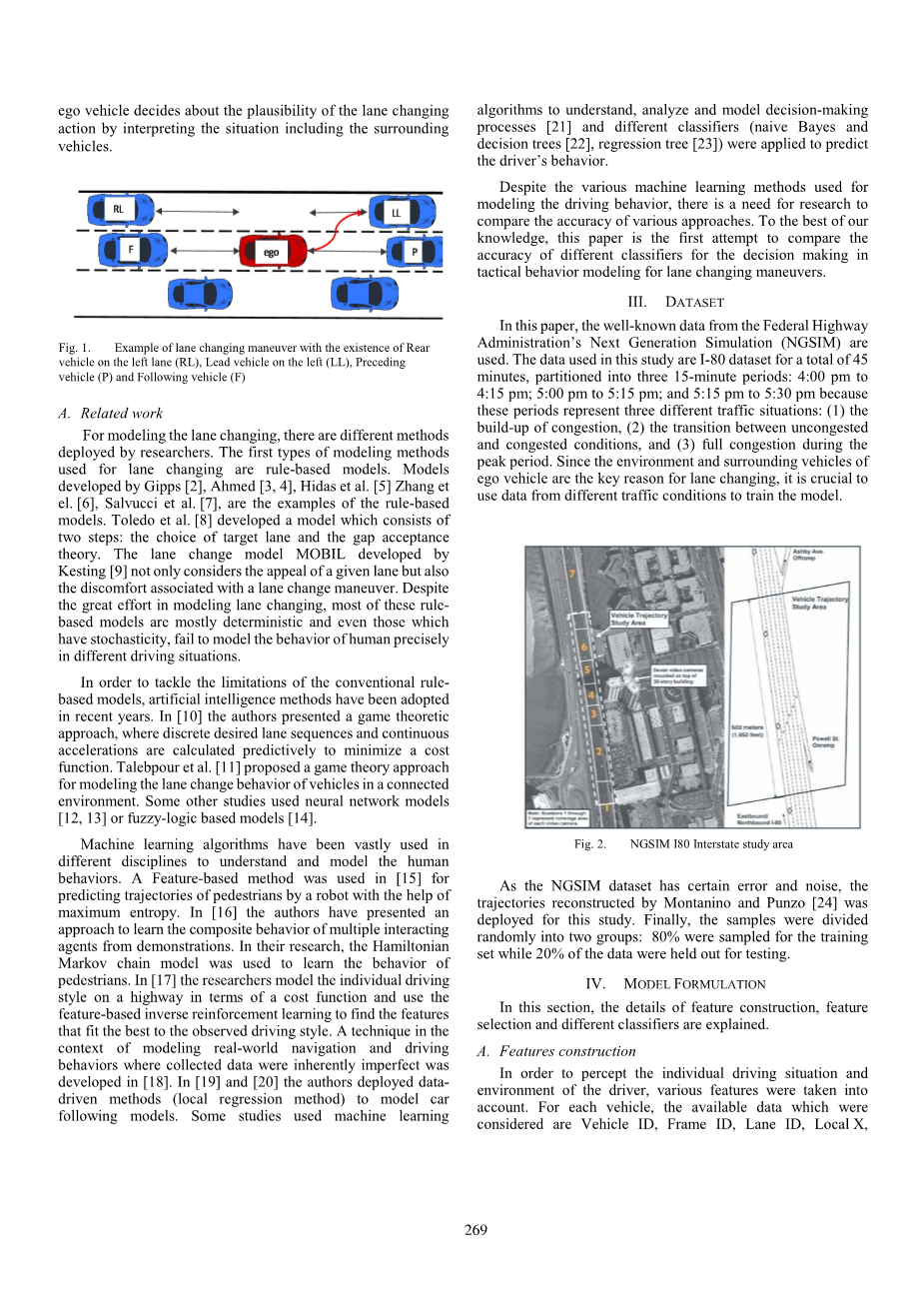
本文使用了美国联邦公路管理局(Federal Highway Administration)下一代模拟(NGSIM)的著名数据。本研究使用的数据为I-80数据集,共45分钟,分为3个15分钟时间段:下午4:00 - 4:15;下午5时至5时15分;及下午5时15分至5时30分,因为这段时间代表三种不同的交通情况:(1)交通挤塞的累积(2)非挤塞情况与挤塞情况之间的过渡(3)高峰期的完全挤塞。由于ego vehicle的环境和周围车辆是变道的关键原因,因此利用不同交通条件下的数据对模型进行训练是至关重要的。
图 2 NGSIM180 洲际研究区域
由于NGSIM数据集存在一定的误差和噪声,本研究采用Montanino和Punzo[24]重建的轨迹进行研究。最后,将样本随机分为两组:80%的样本用于训练集,20%的数据用于测试。
4模型搭建
在这一节中,将详细介绍特征构造、特征选择和不同的分类器。
A特征生成
为了了解驾驶员的个人驾驶情况和环境,考虑了驾驶员的各种特征。为每辆车时,可用的数据有Vehicle ID, Frame ID, Lane ID, Local X, Local Y, Mean Speed, Mean Acceleration, Vehicle Class ID, Vehicle length, Follower ID and Leader ID。一些功能没有直接可用的变量数据集,因此特点建立了基于可用的数据。例如,左车道上的前后方车距,左车道上前后车的速度和加速度的连续两次时间步长及其随时间的变化,这个框架中的所有车辆的以平均速度为代表的交通状态。这些特征的完整列表如表1所示。在本研究中,我们研究了周边车辆的行驶历史对ego车辆改变车道决策的影响。更具体地说,我们考虑了3个连续时间步长的周围车辆的速度差异来表示这种现象。将视频中每一帧中存在的所有车辆的平均速度作为表示交通状态的指标。值得注意的是,我们也主要考虑了每一辆车的加速度,但是由于速度差与加速度的高度相关性,加速度被从特征列表中删除。
下一步是识别变道事件,并根据我们的特性对其进行标记。当车辆侧向位置不发生振荡时,将事件标记为变道。由于本研究的重点是左侧变道行为,因此只考虑左侧变道发生的事件。数据集包括1391起变道事件和3047237起非变道事件。
B特征选择
从数据集中一组特征中自动提取对预测变量影响最大的特征的过程称为特征选择。数据中存在过多的无关特征可能会降低模型的准确性。因此,在执行机器学习算法之前进行特征选择可以减少过拟合,提高精度,加快训练速度。为了选择对预测贡献最大的特征和降低样本集维数的特征,对数据集进行特征重要性分析,根据特征的重要性对特征进行排序。我们有一个高维数据集,这种降维可能帮助我们提高估计的性能。采用递归特征消除、特征重要性排序和单变量选择等方法进行特征选择。在本研究中,后者由于其准确性、健壮性和易用性而被随机森林部署。值得注意的是,在执行分类算法之前,需要对特征进行规范化,因为我们的特征具有不同的尺度。
特性重要性排序如表1所示。在这个表中,每个特性都以(time step)形式显示,并使用以下缩写:
关于参数v:车辆的速度, d:自我车辆和目标车辆之间的距离; I:车辆的长度; w:宽度的车辆; C:汽车类;:平均速度
关于时间步长(t):当前时间步长,(t-1):前一个时间点步长,(t-2):前两个时间点步长
关于车辆P:前面的车,F:后面的车,LL:左车道上的车,RL:左车道上的车,L:左车道上的车。
表 1 基于特征重要性等级的随机森林特征选择
从表中可以看出,变道机动前某一时刻相邻车辆的速度差对变道决策的预测贡献最大。另一方面,ego车的类别,和跟车以及主车道上的车的类并不同,它似乎不是一个信息特征。
分类器使用两种不同的方法构建,一种是考虑所有特征,另一种是考虑减少的特征数量(50%)。对于每种方法,在所有分类器中,利用Scikit-learn对朴素贝叶斯(Naive Bayes, NB)、径向基函数核支持向量机(SVMRBF)和线性核支持向量机(linear kernel, SVML)、逻辑回归(Logistic Regression, LR)、k近邻(k-Nearest Neighbors, kNN)、额外树(Extra Trees, ET)分类器、决策树(Decision Trees, DT)和随机森林(Random Forest, RF)分类器进行训练[25,26]。下面给出了每个分类器的简短描述。
朴素贝叶斯是一组基于贝叶斯定理[27]的监督学习算法,它假设特征对之间的独立性是“朴素”的。当数据是高维的,并且表示生成假设和参数估计如何简化学习过程时,这种分类是合适的。
支持向量机适用于高维特征空间[28]中线性预测的学习,基于结构风险最小化原理[29]。SVMs试图找到一个假设h,它的真实误差可以保证是最小的。径向基函数核非线性可以将样本映射到高维空间,从而处理属性与类标签之间的非线性关系。
Logistic回归是以该方法的核心Logistic函数命名的。逻辑回归描述解释变量与离散响应变量[30]之间的关系。逻辑回归算法的系数必须使用最大似然估计[28]从训练数据中估计。
k近邻分类是最基本、最简单的分类方法之一,多用于对数据分布缺乏先验知识的情况下。最近邻方法的原理是记忆训练数据集,找到距离新实例最近的预定义训练样本个数,并从中预测标签。这里选择的邻居数是10。
决策树(DT)是一种用于分类和回归的非参数监督学习方法,它试图在每个点上找到数据的最佳分割。其目标是通过学习从数据特征推断出的简单决策规则来创建一个预测目标变量值的模型。然而,DTs存在创建过于复杂的树而不能很好地泛化数据的风险。(31、32)
额外树分类器和传统决策树的区别在于它们的构建方式。在寻找将节点样本分成两组的最佳分割时,绘制随机分割,随机选择特征,选择最佳分割。因此,它们的结构独立于学习数据集[33]的输出值。在本研究中,我们分别使用193棵树和184棵树对所有特征和50%特征的情况进行了额外的树分类器训练。
随机森林分类器由树预测器组合而成,使得每棵树都依赖于独立采样的随机向量的值,并且对森林[34]中的所有树具有相同的分布。基于Scikitlearn的文档,该分类器对数据集的不同子样本上的多个决策树分类器进行拟合,并通过对它们进行平均来提高预测精度和控制过拟合。在本研究中,第一种和第二种情况下的最大估计值分别为100和151个估计值。
5结论
本节给出了上述分类器预测驾驶员变道决策的结果。
在我们的数据集中,变道事件和非变道事件的比例是不一致的。分类器通常对检测多数类更敏感,而对少数类不那么敏感,分类方法可能会有偏差,导致总是预测多数类,即在我们的研究案例中表现为不更改车道。因此,有必要解决这个问题。本研究采用两种不同的方法:对多数类进行欠采样,对少数类进行过采样。在对多数类进行欠采样时,从多数类中随机抽取n个样本,其中n为少数类的样本个数,用于训练阶段。对少数类进行过度采样的一个简单方法是复制条目。但是,如果这一步是在交叉验证之前完成的,则可能会导致过拟合和误导结果。使用SMOTE方法对数据集进行过采样会导致数据过拟合。因此,这里只给出了随机欠采样的结果。
每个分类器都使用10倍交叉验证进行训练,训练数据集被分割成10个不相交的等大小子集,其中9个分区被组合成训练数据,而保留的分区用作测试数据。交叉验证的性能是循环中计算的值的平均值。图3展示了不同分类器交叉验证的准确性。从图中可以看出,ET、DT和RF的准确率均超过95%,优于其他分类器。虽然在DT中,每一步整个样本和决策边界是随机选择的,而不是选择最好的一个,DT的性能略优于ET。尽管鉴于偏见方差分析,ET被认为是比RF更好的性能数据集,但在我们的案例中RF的准确性浩宇DT和ET。NB,,,LR和kNN分类器的特征选择,不像DT,ET和RF分类器的精度略有下降。此外,使用选定的特征而不是所有的特征并没有显著地改变模型的准确性。
图 3 不同分类器交叉验证的准确度结果
为了对模型在完全不可见数据上的性能给出真实的估计,并确认模型的实际预测能力,对模型在测试数据上的准确性进行了检验。图4显示了模型对不同分类器的预测精度。NB、、和LR对决策的预测准确率均小于40%,说明这些分类器并不适合本研究的目的。kNN、DT、ET和RF的准确率显著提高,这些分类器似乎可以在进行变道之前用于预测人类战术行为中的决策。
6结语
本文研究了变道左转中的战术行为,并利用监督机器学习算法从普通驾驶员的行为中学习驾驶行为。为此,我们使用了来自NGSIM数据库的单个车辆轨迹,并使用不同的分类器进行变道决策预测。结果表明,决策树分类器和决策树分类器预测变道决策的准确率分别为98.78%和99.8%,具有良好的应用前景。
作者认为,
资料编号:[5005]



