直角坐标机械臂搬运控制系统设计毕业论文
2020-02-19 07:58:55
摘 要
在工业自动化生产过程中,机械手发挥了不可替代的作用,在现代制造技术领域中扮演了极其重要的角色,其能自动化定位控制,可重新编程序,并有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
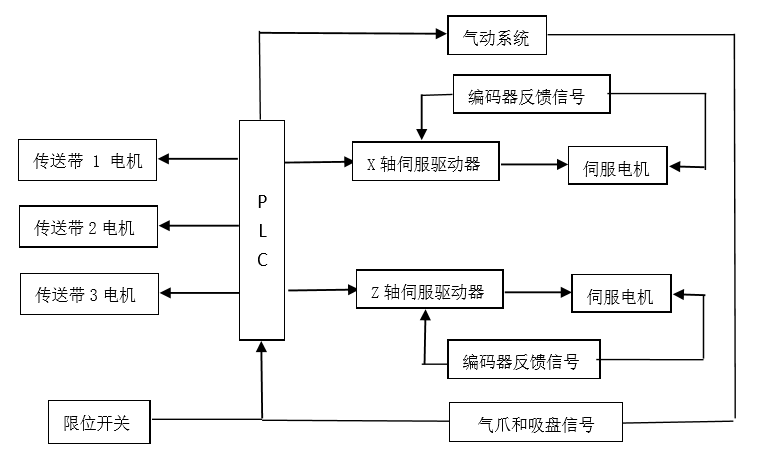
直角坐标机械臂搬运控制系统设计,依据搬运控制系统的具体要求,采用PLC作为控制器,通过对伺服驱动器的控制驱动伺服电机,完成机械臂的平移、升降等动作。系统硬件设计着重于硬件选型和电路设计,软件设计则完成系统工作流程图和程序的编写。其中,依据系统I/O口的数据类型和端口数量完成控制器选型,依据功率大小和设备特点完成伺服驱动器选型,依据系统流程图完成程序编写。在对系统进行调试的过程中,发现设计不足的地方并加以改进,最终完成了直角坐标机械臂搬运控制系统设计,满足设计要求。
关键词:直角坐标;搬运控制系统;PLC;伺服驱动器
Abstract
In the process of industrial automation production, the manipulator plays an irreplaceable role and plays an extremely important role in the field of modern manufacturing technology. It can automatically locate and control, reprogram, and have many degrees of freedom, which can be used to carry objects to complete work in different environments.
Cartesian coordinate manipulator handling control system design, according to the specific requirements of the handling control system, the use of PLC as a controller, through the control of the servo driver to drive the servo motor, complete the manipulator translation, lifting and other actions. Hardware design of the system focuses on hardware selection and circuit design, while software design completes the compilation of system workflow diagram and program. Among them, according to the data type and the number of I/O ports, the controller selection is completed, the servo driver selection is completed according to the power and equipment characteristics, and the program is completed according to the system flow chart. In the process of debugging the system, the deficiencies of design are found and improved. Finally, the design of Cartesian coordinate manipulator handling control system is completed, which meets the design requirements.
Key words: Cartesian coordinates,;handling control system,;PLC,;servo driv
目录
第1章 绪论 1
1.1 目的及意义 1
1.2 国内外发展现状 1
1.3 机械臂技术综述 3
第2章 方案设计 4
2.1 设计要求 4
2.2 方案选择 5
2.3 方案设计 6
第3章 硬件设计 9
3.1 可编程控制器 9
3.2 控制流程 10
3.2.1 传送带工作流程 10
3.2.2 机械臂工作流程 11
3.3 I/O口分配 12
3.4 硬件选型 13
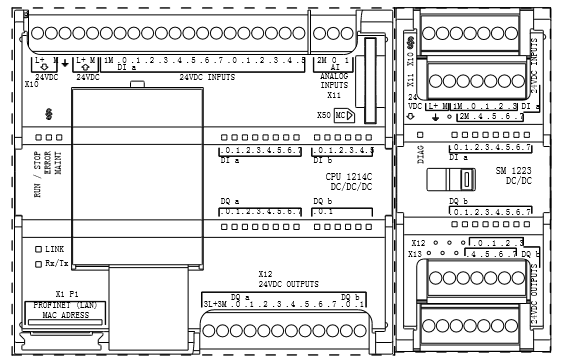
3.4.1 PLC选型 13
3.4.2 扩展模块选型 14
3.4.3 伺服驱动器选型 15
3.4.4 常用按钮选型 18
3.5电路设计 19
3.5.1电源回路设计 19
3.5.2伺服驱动器电路设计 19
第4章 软件设计 21
4.1 系统流程图 21
4.1.1 传送带自动操作流程图 21
4.1.2 机械臂自动操作流程图 22
4.2 运动控制指令 23
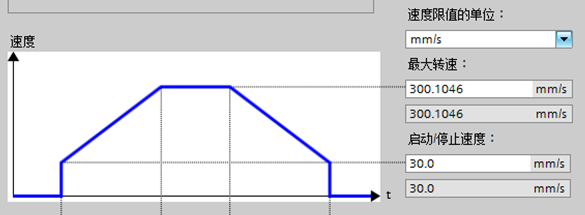
4.3 工艺对象组态 24
第5章 系统调试 27
第6章 结论与展望 31
参考文献 32
致谢 33
附录A 34
附录B 35
附录C 47
第1章 绪论
1.1 目的及意义
20世纪末期,“智能模拟”作为新兴科技被国家大力发展,从开始到现在,该课题在图像处理方面,专家系统方面,机器人方面等新兴领域已经建立了一系列丰硕成果,逐渐趋于成熟。近几年来,“工业智能工程”日渐兴起,智能制造作为其重要一部分,也得到了足够的重视与发展,成为了国家科技部提出的技术创新计划中的比较重要的项目。2015年,智能制造迈入新的发展时期,40多个项目选入国家公布的智能制造试点示范项目中去,国家从政策方面给予了足够的支持。在2018年召开的全国工业和信息化工作会议中,智能制造作为重点角色再一次在会议中提及,对其未来的发展作出了进一步的细化和部署。时至今日,伴随着自动化技术的进一步发展和成熟,在中国范围内,乃至世界范围内,智能制造的浪潮从悄然兴起已演变为如火如荼。
工业的迅速发展,得益于自动化技术的日渐成熟和深入应用。作为自动化技术工业化的典型代表,机械手在如今的工业化生产过程中扮演着不可或缺的角色。随着机械手方面的技术越来越完善,机械手可以完成的动作也越来越复杂,越来越类人化,智能化。工业生产过程中,不可避免的会出现温度偏高、容易爆炸、毒性气体等恶劣环境,对劳动者的人身安全产生了极大威胁,而机械手在工业生产过程中的深入应用则有效解决了这一难题。机械手在某种情况下可代替人力进行工作,极大的解放了人力,特别是在特殊环境下,如有毒、易爆、高温、放射性等,机械手自身的优势得到了极大程度的彰显,减少劳动者身处恶性环境中的机会和时间,保障他们的人身安全,改善劳动环境,也避免了因长时间重复相同工作感到无聊枯燥而造成工作效率低下的情况发生。
本次设计的是直角坐标机械臂搬运控制系统,为工业生产过程中常见的一类机械手,其在工业生产过程中主要担任搬运物料的工作,可以极大程度的减轻人力损耗,甚至在运输过程中相比人力更加稳定可靠。通过对搬运机械手的深入研究和使用,可以对其工作模式,工作过程进行进一步的完善和改良,使它能够更加智能化的工作,更加符合工业生产的特性,能够提高生产过程中的自动化程度,有利于实现材料的自动化传送,工件的自动化组装等。同时搬运机械手在工业中的使用,可以使生产过程变的更加规律和规范。
1.2 国内外发展现状
相比于国内,国外技术变革出现较早,工业机器人的技术发展历史也比较悠久,有一定程度上的先发优势。减速器是工业机器人中的一个核心部件,处于十分重要的地位,日本在这一方面有着独特的理解,其技术在世界范围内都是位列前茅的。而在机器人的零部件以及原材料方面,做工最为优良的基本上全部来自于德国,悠久的工业历史为德国提供了深厚的技术积累,也为它掌握制造零部件的核心技术提供了良好基础。尽管各个国家在工业机器人方面各有所长,各有所依,但真正意义上的世界上第一代工业机器人是在美国诞生的,为球坐标形式的机器人。在机器人理论技术发面,美国一直着重发展,处于世界前列。经过这么多年的发展,现在市场上较为主流的工业机器人有:日本的安川YasKawa工业机器人、德国的KUKA工业机器人、意大利的Comau工业机器人以及瑞典的ABB工业机器人等。这些企业参与制定了工业机器人行业的大部分国际标准,也为它们占据大部分工业机器人市场份额奠定了基础。
就国内而言,近年来科技水平突飞猛进,工业4.0兴起,传统工业生产过程逐渐向智能化生产转变,工业机器人需求量逐年上升,工业机器人市场规模进一步扩大,2016年机器人销售量高达9万台左右。按照目前的增长水平以及增长趋势来看,中国工业机器人市场销售量在未来几年内仍将继续增长,2019年市场销售量预计会超过20万台之多。当然这一切的实现与走向和国家的政策息息相关,特别是最近几年来多项针对智能制造行业的扶持、补贴政策的制定和实施,如《中国制造2025》等,刺激了市场需求,充分促进了国内工业机器人产业发展和升级。在这样的有利政策背景下,多家公司看到了工业机器人的发展前景,涉足工业机器人,如美的集团、汇川技术、上海机电等,我国机器人取得长足进步,智能化程度越来越高,高精度、网络化等技术愈加成熟。即便如此,与发达工业国家相比,我国机器人产业仍然处于比较落后的位置,主要原因在于我国这方面的技术发展起步较晚,核心技术掌握不足,机器人重要部件仍然主要依靠引进,缺乏自主创新能力,存在企业规模较小,布局分散等问题,未来仍然有着很大的上升空间。
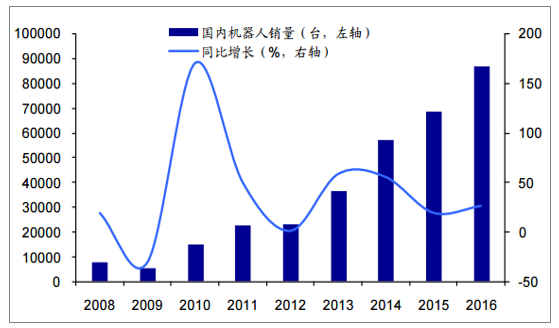
图1.1 国内近年机器人销量柱状图
1.3 机械臂技术综述
机械臂,从它的用途而言,是能够代替人力进行工作的一种机器,它需要能够对人的手臂动作进行简单的模仿,越精密,越复杂的机械臂,其模仿的相似程度也就越高,可以自主抓取、搬运物料,有一定的自动化水平。伴随着科学技术水平的不断发展,计算机技术、自动化技术生活化、工业化的程度越来越高,在先人对机器人研究的基础上,20年代中期对机械手的研究应运而生。从不同的方向进行划分,机械手可分为不同种类。从机械手的驱动结构来划分,它可以分为机械式、电动式、液压式、气动式四大类机械手;从机械手的使用范围来划分,它可以分为专用机械手和通用机械手两大类;从机械手的运动轨迹来划分,它可以分为点位控制和连续轨迹控制机械手等 。
工业机器人的发展从开始到趋于完善,从简单操作系统到复杂操作系统,时至今日,它的发展历程概括起来大致可以分为以下几个阶段:
第一代机械臂被称为示教/再现方式的机械臂,即按照事先编排好的程序进行重复的动作的机械,智能化程度较低。到目前为止,这种类型的机械手仍然被大规模应用在工业生产过程中,但由于它的灵活性较低,其使用范围较为狭窄,大部分被应用到电焊、搬运、喷漆等方面。
第二代机械臂是带感觉的机械臂,可以通过感知外部事物调整自身行动,智能化程度较高,具备如视觉、触觉等外部感觉功能。机械手视觉、触觉等外部感觉功能的加入,使它能够完成相较于第一代机械臂更加复杂、精密的动作,如在科普展览过程中频繁现身的人脸肖像绘制机械臂,他可以自动绘制不同人的人脸肖像轮廓。
 第三代机械臂则更加突出“智能”二字,可以根据不同的环境做出不同的规划和决策,可以根据工作对象的变化,调整自我状态,及时适应工作环境。就现在而言,第三代机器人的技术仍然不够成熟,无法大面积推广使用。但值得高兴的是,第三代机械臂终有一天会到来,将陈旧的上一代取而代之。
第三代机械臂则更加突出“智能”二字,可以根据不同的环境做出不同的规划和决策,可以根据工作对象的变化,调整自我状态,及时适应工作环境。就现在而言,第三代机器人的技术仍然不够成熟,无法大面积推广使用。但值得高兴的是,第三代机械臂终有一天会到来,将陈旧的上一代取而代之。
图1.2 工业机器人发展史
第2章 方案设计
2.1 设计要求
 直角坐标搬运机械臂应用于工业“4.0”实验室中,需要了解直角坐标搬运机械臂的组织结构及工作原理,设计实现机械臂上移、下降、左移、右移、抓取等各种动作,完成机械臂自动运作及手动操作模式。观察现场环境,明确机械臂在该系统中承担的具体任务,设置合理参数,实现其正常工作。
直角坐标搬运机械臂应用于工业“4.0”实验室中,需要了解直角坐标搬运机械臂的组织结构及工作原理,设计实现机械臂上移、下降、左移、右移、抓取等各种动作,完成机械臂自动运作及手动操作模式。观察现场环境,明确机械臂在该系统中承担的具体任务,设置合理参数,实现其正常工作。
图2.1 工业4.0柔性生产线展示系统
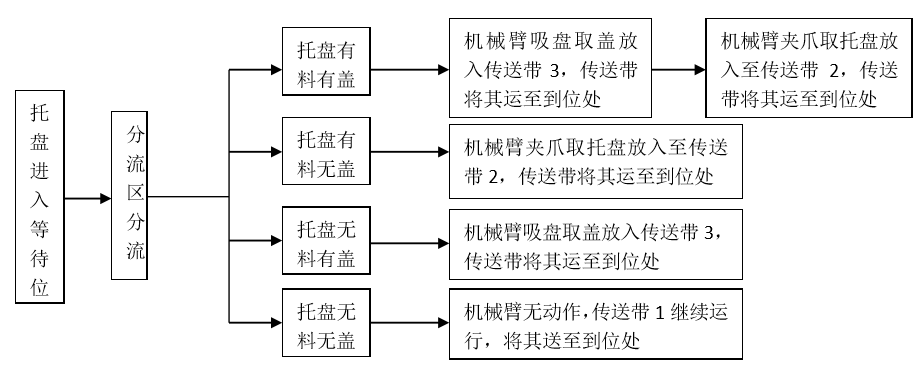
在本次设计中,机械臂承担搬运物料托盘的工作,其具体工作要求如下:机械臂需具备两种操作模式,一种是无需人工干预,可自行动作的自动操作模式,另一种是机械臂根据人工指令动作,无法自主行动的手动操作模式。在手动模式下,可以通过按钮控制机械臂的上升、下降、抓取等各个动作。在自动模式下,对机械臂输入“启动”指令后便无需人工参与,机械臂自动运行:在初始位置下行,下行到位后停留2S,等待抓取单元稳定,而后上升,上升到位后停留0.1S等待X轴使能,而后右行,根据不同的抓取对象,在不同的位置下行,下行到位后停留2S,等待放松单元稳定,而后按照原路返回初始位置,等待下个命令。
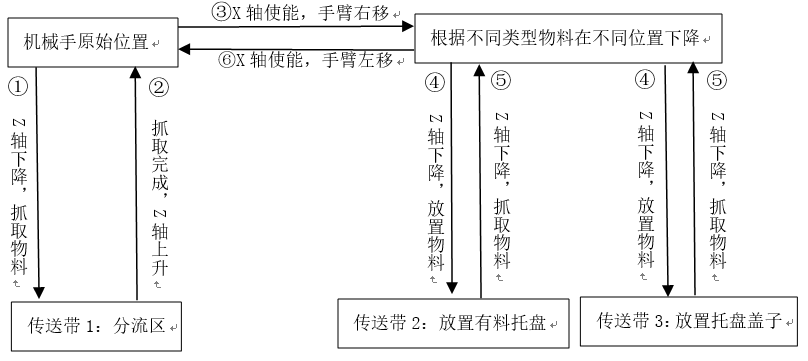
图2.2 机械臂工作流程示意图
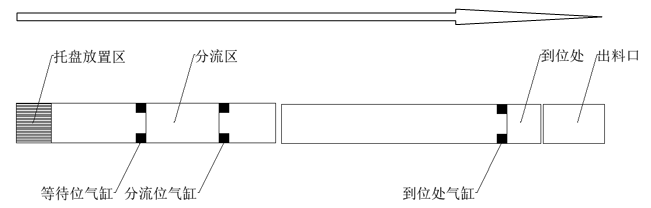
传送带在系统中起运送托盘的作用,其具体工作要求如下:托盘放置到传送带1起始端,运送至等待位,无需等待的话则运输至分流区,分流后根据情况分别运送至传送带1后半段、传送带2、传送带3。
2.2 方案选择
从设计的题目中不难得知,此次为控制系统的设计。目前为止,在控制系统中常用的核心控制器主要有单片机和PLC两大类,以此为基础衍生出两种设计方案。
方案一:以PLC作为核心控制器,搭建外部电路,根据系统流程逻辑,编写梯形图,实现系统功能。
方案二:以单片机作为核心控制器,根据设计要求编写C语言程序,实现系统功能。
作为两种方案,各有其优劣点,具体表现在以下几点:
(1)稳定性。就一个系统而言,稳定性是其能否可靠工作的重要指标。相较于单片机,PLC更加成熟,I/O模块及其配套部件齐全,功能完善。从某种程度上说,PLC自身便已经是一个系统,具备强烈的抗干扰能力和逻辑判断能力,而单片机则仅仅是一个芯片而已。
(2)灵活性。从体积来看,单片机的体积是远远小于PLC的,适用于小型控制系统,比如各类智能测量仪表,手机等电子设备。但从系统设计角度来看,随着时间的推移可能对系统提出的要求不同,I/O口的数量也会相应变化,而以单片机为核心的控制系统一旦成型很难做到随意增加,但PLC则可以通过扩展模块等方式解决这一问题。
(3)通用性。对应各自的编程语言,PLC所采用的梯形图语言可读性更高,更加容易理解和接受,对设计人员要求较低。而且PLC上接口种类多,方便系统搭建。
(4)经济性。从市场状况来看,单片机占据价格优势,成本较低。但从长远角度来看,单片机开发难度高,人力投资大,其损耗未必会比PLC低。且单片机的售后服务尚不成熟,很难与PLC相提并论,缺乏保障性。
通过以上几个方面的对比,联系本控制系统的应用环境,为工业生产过程中的直角坐标机械臂搬运控制系统设计,因此采用方案一更为合理,即采用PLC作为系统的核心控制器,系统可靠性更高,在I/O口的扩展上更加方便,虽然在价格上不具优势,但它在人力上的消耗更小。
2.3 方案设计
上文论述中曾提到,尽管目前市场上的机械手种类繁多,形式各异,但大多包括控制机构、执行机构以及驱动机构这三大组成部分,本系统的设计也不例外。
纵观市场上的各类机械手臂,其动力来源无外乎液压驱动、气压驱动、电气驱动和机械驱动四大类。四种驱动方式各有所长,具体如表2.1所示,在进行动力来源的选择时,应根据机械臂具体应用环境所定
表2.1 机械手驱动方式
驱动方式 | 特点 |
液压驱动 | 体积小巧,运行稳定,对外部环境要求较低、,良好的防爆性能,但容易发生液体泄漏等情况,液压元件要有良好的密封性能且精度要高。 |
气压驱动 | 动力来源方便,成本较低,组成简单,动作反应迅速,但由于气压变化较快,速度难以控制,且气压不可太高,无法抓取过重物品。 |
电气驱动 | 传动结构简单,抓取力较大,灵活度高,信号检测处理方便,控制方案多样化。 |
机械驱动 | 工作稳定可靠,但系统灵活度较低,一旦成型,难以调整。 |
对于驱动方式的选择,在本次设计中,机械手的移动,即沿X轴的伸缩和沿Z轴的升降,是通过伺服电机带动的。通过编写的程序可利用PLC控制伺服驱动器,进而控制伺服电机,以此达到控制机械手移动的目的。该种控制方式结构简单,且可通过修改程序控制机械手移动的各个方面,方便快捷,属于电气驱动模式。在整个应用环境中,机械手服务于抓取对象。但就本系统的抓取对象而言,有时会存在需抓取玻璃盖子的情况,需使用吸盘吸取,显而易见的这需要改变吸盘气压,属于气压驱动模式。经过以上探讨,确定使用电气驱动的模式完成机械手沿轴的移动动作,而机械手的夹取动作则采用气压驱动模式。
对于机械手的执行机构,根据机械手所要执行的任务,托盘的夹取需要用到夹持式手部,而对于有些有盖子的托盘则需用到吸附式手部取走盖子,因此,在本系统中,既采用到了夹持式手部,也采用到了吸附式手部。
控制机构通过对驱动机构以及执行机构的控制,使机械臂按照指定要求动作。在工业生产过程中,最为常见的是采用PLC控制,这也是本设计中所要采取的控制方式。
图2.3 机械手的气爪和吸盘
根据设计题目给出的具体要求,容易得知机械手实现的主要作用是:生产线上有1、2、3三条传送带,机械手需将材料从传送带1抓取至2或3传送带。其坐标形式为直角坐标,动作表现为沿X轴的伸缩、沿Z轴的升降以及气爪的开合。由于气爪的开合不会改变材料的位置和方向,由此可以确定二自由度机械手即可满足生产要求。
在本系统中,空气压缩机产生压缩空气,经过两位五通电磁阀和单向节流阀后进入开合气缸。两位五通电磁阀电磁线圈的通断决定了气缸的动作。比如需要控制机械手做气爪张开动作时,PLC发出指令,两位五通电磁阀通电,开合气缸活塞伸出,引导两侧夹爪张开。当行驶至限位开关时,电磁阀断电,张开动作停止。同理,机械手的气爪的闭合也都依据相似原理进行动作。吸盘在与吸取对象接触后,通过真空发生器作用,内部形成真空状态,与外部大气压形成压力差,将对象牢牢吸住,完成吸取工作。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: