面向车联网的实时路况动态导航应用研究毕业论文
2020-02-19 07:53:36
摘 要
随着我国经济的飞速发展,人们的生活水平在不断提高,购买力也随之增强。与此伴随的是每年汽车的吞吐量在不断上升。然而,车辆数量的急速增加带来了很多负面问题,比如城市拥堵,交通事故频频发生等等。智能车载导航系统由此问世。智能车载导航系统是智能交通系统的重要组成部分,其主要功能是借助于电子地图规划最优行车路线,并在行驶过程中为驾驶员实时提供车辆位置、速度、方向以及周围地理环境等信息,以指导驾驶员快速、安全、准确地到达目的地。
本文结合车载导航的应用背景,基于Android系统设计了一种能在地图上实时显示路况信息,并能根据实时路况进行动态导航与车速引导的车载智能系统。该系统以Android studio作为软件搭建平台,能够在手机上进行安装应用。论文首先介绍了车路协同系统的构建,包括两个单元组成以及结构框架,然后介绍了基于车路协同系统设计了动态导航的相关算法,包含路径规划与车速引导,路径规划是基于Dijkstra算法来实现的,而车速引导是则是基于当前车速和信号灯信息来实现的,最后介绍了测试环境与测试的有关结果。
本文设计的车载导航系统的特点是能将收集到的实时路况信息显示在百度地图上并根据相关算法进行动态导航,能够解决一些实际问题,比如减轻路口的拥堵等等,具有一定的实用性。
关键词:Android、车载导航、实时路况、路径规划、车路协同、动态导航
Abstract
With the rapid development of China's economy, people's living standards are constantly improving, and their purchasing power is also increasing. Accompanied by this, the throughput of automobiles is increasing every year. However, the rapid increase in the number of vehicles has brought many negative problems, such as urban congestion, frequent traffic accidents and so on. Intelligent vehicle navigation system came out. Intelligent Vehicle Navigation System is an important part of Intelligent Transportation System. Its main function is to plan the optimal driving route with the help of electronic map, and provide real-time information of vehicle location, speed, direction and surrounding geographical environment for drivers in the course of driving, so as to guide drivers to reach their destination quickly, safely and accurately.
Combining with the application background of vehicle navigation, this paper designs an on-board intelligent system based on Android, which can display real-time road information on the map, and can dynamically navigate and speed guide according to real-time road conditions. The system uses Android studio as the software platform and can be installed and applied on mobile phones. Firstly, the paper introduces the construction of vehicle-road collaborative system, including two units and structure framework. Then, it introduces the relevant algorithms of dynamic navigation based on vehicle-road collaborative system design, including path planning and speed guidance. Path planning is based on Dijkstra algorithm, and speed guidance is based on current vehicle speed and signal information. Finally, it introduces the implementation of vehicle-road collaborative system. The test environment and the test results are given.
The characteristics of the vehicle navigation system designed in this paper are that the collected real-time road information can be displayed on Baidu map and dynamically navigated according to real-time road conditions, which has certain practical value.
Keywords:Android, Vehicle Navigation, Real-time Road Conditions, Path Planning, Vehicle-Road Cooperation, Dynamic Navigation
目录
摘要 I
Abstract II
第一章:绪论 1
1.1 研究目的与意义 1
1.2 研究现状与发展趋势 1
1.2.1 研究现状 1
1.2.2 发展趋势 3
1.3 论文的结构框架 3
第二章:车路协同系统构建 4
2.1 车路协同系统概念 4
2.2 车路协同系统组成与结构框架 4
2.2.1 车路协同系统组成单元 4
2.2.2 车路协同系统的结构框架 5
第三章:动态导航算法设计 7
3.1 智能车载导航系统的功能及框架 7
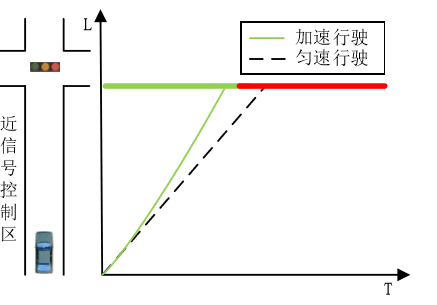
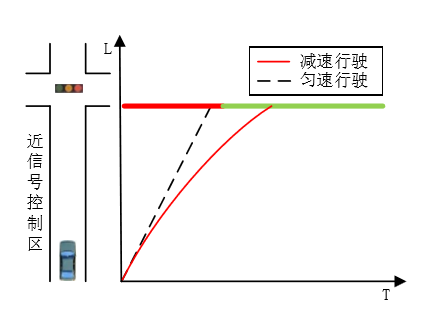
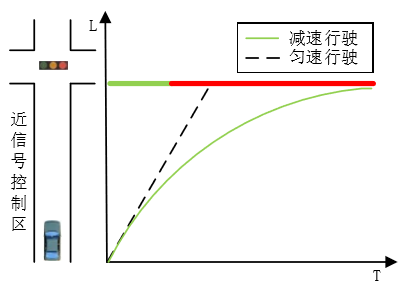
3.2 车速引导 7
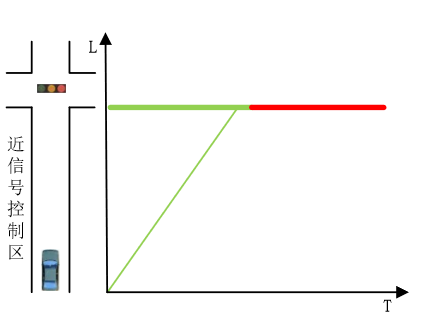
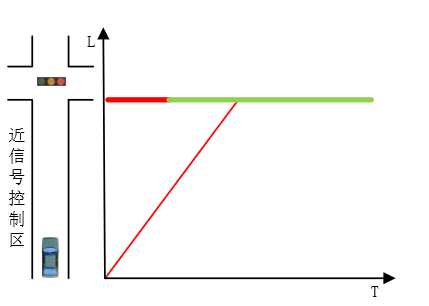
3.2.1 车速引导的应用背景 7
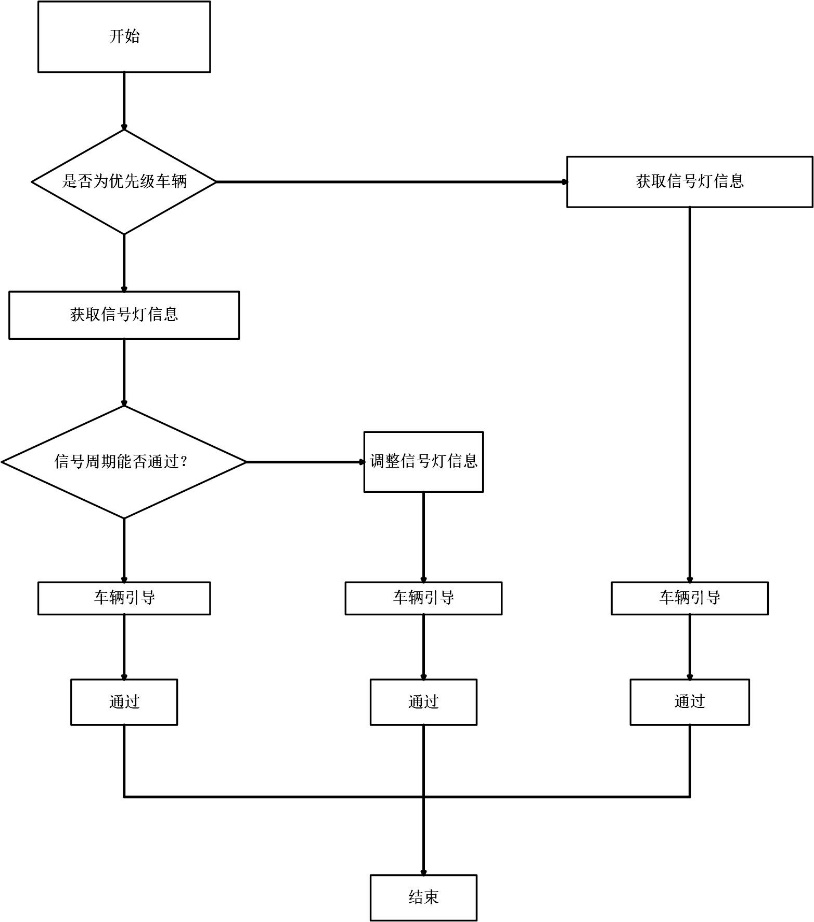
3.2.2 车速引导的工作流程 8
3.2.3 车速引导算法 9
3.3 路径规划算法 11
3.3.1 最优路径设计 11
3.3.2 最优路径规划算法 12
3.3.3 最优路径的评判标准 13
3.3.4 基于Dijkstra的路径规划算法优化 14
3.3.5 路况信息的图层叠加方法设计 14
4测试环境与测试结果分析 16
4.1 基于Android的开发环境 16
4.1.1 Android开发的优势 16
4.1.2 Android系统框架 16
4.2 测试场景与结果分析 17
4.2.1 车速引导的测试场景 17
4.2.2 车速引导测试结果 19
4.2.3 路径规划测试结果 19
5.全文总结 21
参考文献 22
致 谢 23
第一章:绪论
1.1 研究目的与意义
随着社会经济水平的提高,汽车数量在急速增加,驾车出行给人们的生活和工作带来了方便,也导致城市频繁发生的城市拥堵情况。交通拥堵造成环境污染、出行时间增加等诸多负面影响。基于此现状,国内外机构利用现有的技术对有交通状况进行分析,为出行者提供最优的实时路况信息,从而达到疏散交通的目的。由此,车载路径引导系统应用而生。车载路径引导系统由于在减少驾驶压力、拥堵、交通事故和空气污染等许多交通相关问题方面的潜力而在世界范围内得到了广泛的应用。
车载导航系统在解决城市交通问题中发挥着举足轻重的作用,比如避免交通事故、缓解交通压力、提高能源效率和交通效率、优化路网建设、降低行驶成本等作用。路径导航系统已引起世界各国的关注。一些国家已经开展了许多相关研究,一些商业产品已经开发并投入使用。车辆路径导航系统是现代多学科高新技术的结晶,集导航卫星与目标定位技术、GIS数字电子地图技术、城市智能交通管理技术、移动通信等高新技术成果于一体[1]。该系统的本质是在路网中寻找满足一定条件的最优路径。路线需要满足最短的总距离、最短的总行程时间、最低的总运输成本和最平滑的路线等条件。其中,高效、实用的跟踪算法是其核心技术,具有巨大的需求空间。目前,流行的车辆导航装置可以根据人们的需要确定出行路线,但基本上都采用基于静态地图的路线规划策略,不考虑交通拥堵、道路封锁、交通事故等可能的路况,需要提高实用性。
在此基础上,本文设计了一种基于车联网的车载智能导航系统。该系统的主要特点是:一方面在电子地图上实时显示车辆周围的路况信息,使驾驶员随时掌握车辆周围的交通状况;另一方面,根据实时路况,做出最优的路径决策,并根据当前道路状况,对车辆周围的交通状况进行实时监控与并进行车速引导[1]。该模型下的最优行驶路径大大降低了交通拥堵等交通事故发生的可能性,在一定程度上解决了交通拥堵导致的道路运输效率低下的问题。
1.2 研究现状与发展趋势
车辆导航系统已研究了40多年,自其建立以来,各国政府、研究机构和企业已被其巨大的价值和广泛的市场前景所吸引,已成为运输、电子、车辆和其他专业的研究领域。更重要的是,动态导航和定位系统车辆可以有效地解决城市交通拥挤问题,减少交通事故,并通过使用实时交通信息提高运输效率
1.2.1 研究现状
1.国外研究现状
因为车载导航系统有着巨大的发展空间以及光明的发展前景,欧美一些发达国家以及日本提早看到了车载导航系统的发展潜力,便迅速投入了大量的资金支持来提供研究。在日本,几乎所有的日本汽车制造商都加入了这场高科技竞争,例如,宏达、日产、本田、马自达、三菱、松下等等,这些公司都开发了自己的导航产品,随着市场的不断成熟,近年来就有30多个新的自主导航系统投入使用,说明了市场的强大需求。在欧洲,飞利浦和西门子早在在1995年就开发出了第一代车载导航系统,用于雷诺、菲亚特和其他大众民用车辆,随着车载导航系统的不断升级,系统的功能也日趋完善,安全性也在不断提升,目前,最新一代的车载导航系统已经是第五代了,该代车载导航系统非常人性化,能够实时为驾驶人员提供路况信息,并且基于车路协同系统,车载终端还能实时获取前方行驶路线中的车辆信息,并且通过将这些信息集成汇总,车载系统能够动态规划出一条最佳行驶路径;自20世纪90年代以来,梅赛德斯-奔驰-S系列,宝马-7系列,根据美国工业发展研究院在GPS world杂志上发表的数据,2007年,日本、北美和欧洲的年销售额约为2000万件。60-70%的汽车在2010-2015年出厂时将装配车载导航系统。今后,该系统的普及率将逐步达到90%。
2.国内研究现状
通过十多年的市场培育,我国的汽车导航技术逐步确立了用户的目标和需求,以及技术研发、市场培育和逐步完善。汽车导航设备的应用市场在逐渐起步和成熟,目前在高速发展中。北斗导航定位系统是我国在上世纪末推出、建立并逐步完善的交通运输业应用系统,将为车载卫星导航定位的发展 提供良好的基础条件和无限的空间。此外,我国的道路建设和电子地图技术,特别是汽车市场的发展,极大地推动了汽车导航技术的发展。21世纪初,北京四维测绘技术有限公司成功生产了汽车DVD测绘软件。2002年,在北京、上海、广州、天津率先使用了车载电子交通地图软件,开创了中国车载电子导航的先河。此后,上海长翔、深圳赛格导航、华北数十家从事导航技术研发和生产的重点科技企业,如北京和中四庄、灵图软件等,在中国逐步崛起。不过相较于欧美等发达国家,我国的车载导航系统发展起步较晚,目前的车载导航系统还不是很成熟,在以下几个方面仍有待提高1)地图服务只能提供静态的导航,当面对实时路况时不能进行动态导航。2)获取实时路况信息的手段太过单一,目前只能通过交通管制中心或者路标或者广播来获取。3)作为车载导航的核心,电子地图其存在的诸多问题更让人为担心。由于电子地图行业尚在起步,业内没有达成统一的标准,而且电子地图的定位精度不高导致与现实的路况匹配较差,更新周期长,这些问题给用户带来了糟糕的体验感。而且车载导航系统不仅需要算法提供框架,更需要硬件来提供支持,驱动车载系统的硬件在国内还不是很成熟,一些核心芯片还需要从国外进口,所以难免受到其他国家的掣肘,而且国内生产的芯片常常不够达标而导致系统奔溃,导致出现安全事故。总之,我国的车载导航系统还不够完善,目前仍处在初级阶段,仍需要不断地进行技术革新以及产品升级来优化。
1.2.2 发展趋势
1)车载导航逐步由中高端走向普及
由于汽车导航一直定位于汽车电子产品的高端装配,近年来汽车制造商普遍采用分层装配的策略,只有顶级和豪华车型才能配备汽车导航信息终端。随着国内保有量的增加和人们出行消费观念的变化,不熟悉道路的驾驶员数量也在迅速增加。此外,通过现代物流、租赁和旅游业的发展以及政府的日常管理,有必要消除和消除道路运输安全、货物运输安全和准时性方面的隐患。车辆导航系统不再作为豪华车的专用品,目前已扩展到公共汽车,出租车,甚至卡车,商用车。其安装舒适,对汽车外观和性能无影响,得到了广大客户的认可。在中低档车辆上普及车载导航信息终端已成为市场不可避免的趋势。
2)车载导航功能更加全面
车载导航信息终端的功能逐步升级,车载导航系统已经从DVD加导航功能升级到集娱乐、导航、安全、辅助驾驶、网络应用、呼叫服务为-体的智能电子信息系统。除了具备卫星同步精确定位、最佳路径搜索、同步语音导航、生活资讯查询等功能和城市地图精准导航之外还集成了移动电视、视频播放和电子相册的娱乐功能,以及蓝牙通讯、无线上网等功能。功能丰富并与汽车深度融合是车载导航信息终端区别于具有导航功能的手机、PDA产品的重要特征之一,从未来发展来看,更多功能、更人性化的设计将是车载导航信息系统的发展趋势。
1.3 论文的结构框架
本论文一共分文5章。
第一章主要介绍了研究车载导航的意义以及研究现状和发展趋势,表明了车载导航系统研究的必要性。
第二章介绍了车路系统的搭建,详细的介绍了它的单元组成以及框架。
第三章介绍了动态导航的算法研究,包括了路径规划与车速引导。
第四章介绍了车联网环境下基于真实路况的安卓应用终端测试结果。
第五章对本论文的研究和学习进行了总结。
第二章:车路协同系统构建
2.1 车路协同系统概念
车路协同系统,是指基于先进的无线通信、传感检测技术和最新的互联网等技术,全方位实施车车、车路信息交互和共享,然后利用采集到的动态交通信息融合使得车辆和基础设施之间能够相互配合,从而使得车辆能够主动进行安全控制,实现信息资源的充分利用以及减少交通事故和减轻道路拥堵的目标,从而形成安全,高效和环保的道路交通系统。
2.2 车路协同系统组成与结构框架
2.2.1 车路协同系统组成单元
车路协同系统由两单元组成,分别是路侧单元(RSU)和车载单元(OBU)。其中路测单元的功能是收集路况信息和车辆信息,然后将这些信息共享至附近完备的设施网络中,从而实现信息共享,并且它还负责将关键有用的信息通过广播循环地传递给车载单元。车载单元的功能除了接受路侧单元的信息外,还能通过路侧单元采集道路信息以及自身源源不断向周围的车载设备传递自身的信息。
1.路侧单元
车路协同系统的道路单元分布在交通信号灯、路灯、电线杆、路边指示牌等基础设施中,通过在其中增加DSRC通信设备,然后进行改装与集成优化,构成了车路协同系统的道路单元。路侧单元第一步对道路信息和车辆信息进行收集,然后利用通信网络实时与数据处理中心进行交互,然后等待下一步的指示。并且,对于关键的采集信息,路侧单元会利用DSRC通信技术手段将其发送到车辆中的车载单元,车载单元则凭借这些信息进行决策与判断。在本次研究中,路侧单元指的是在路边指示牌上安装的通信设备。RSU由射频控制器和高增益定向束控读写天线构成,如图2-1所示,覆盖区域约10到30米,遵循WAVE标准,其通信频率为5.9GHz。

图2-1 路侧单元
2.车载单元
车路协同系统的车载单元是由一个DSRC信号交换器和基于Android系统的车载终端所构成。其中,DSRC信号交换器类似于一个信息采集模块,负责收集周围的道路信息以及车辆信息,通常,DSRC信号交换器还能接收一些指令信息,然后它会把这些指令信息发送到Android设备上进行解码。而车载终端是指安装在各个机动车辆上的终端设备,一般以基于Android的操作系统为载体,使用起来方便简单,而且基于该操作系统可以进行丰富多彩的开发应用,能够应对不同的实际场景,延展性较好。简单的车载单元主要由收发器与信息存储介质(如IC卡)构成。V2I与V2V通信中的OBU设备比以往更加复杂,包括了嵌入式操作系统、高精度同步时钟和定位系统等,以满足多样化的需求,如图2-2所示为车载单元。
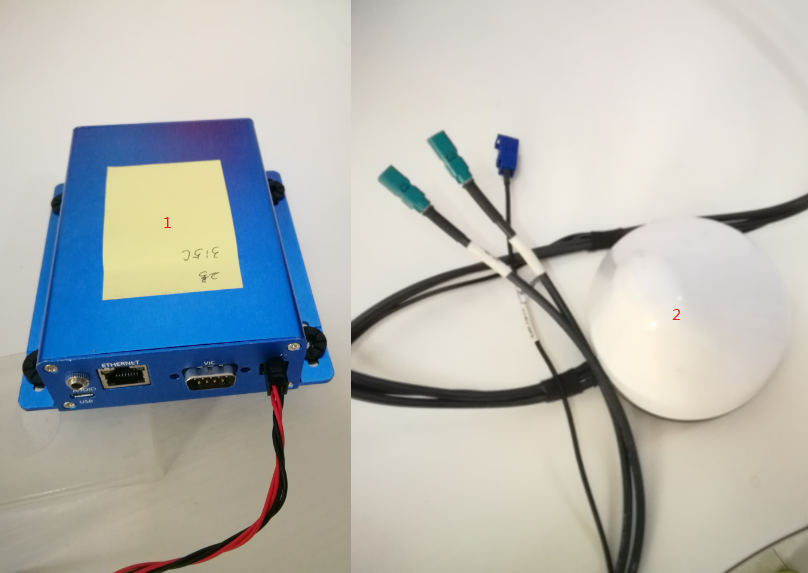
图2-2 车载单元
图2-2标号为1的部分为OBU的主体,此嵌入式操作系统运行Linux2.6.6内核,其作用是完成信息的收发和处理,而标号为2的部分为5.9GHz天线,它能为系统提供同步的UTC时钟与准确的地理位置,并通过与RSU设备连接以此形成无线传输通道。
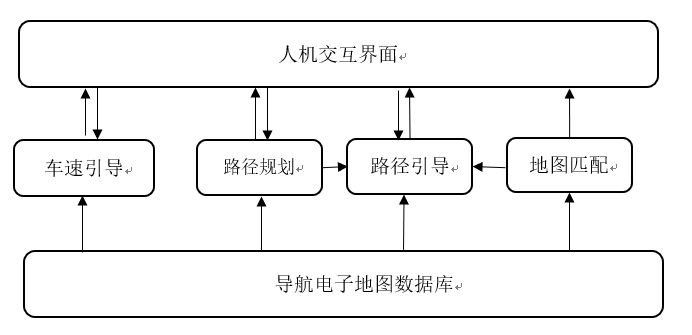
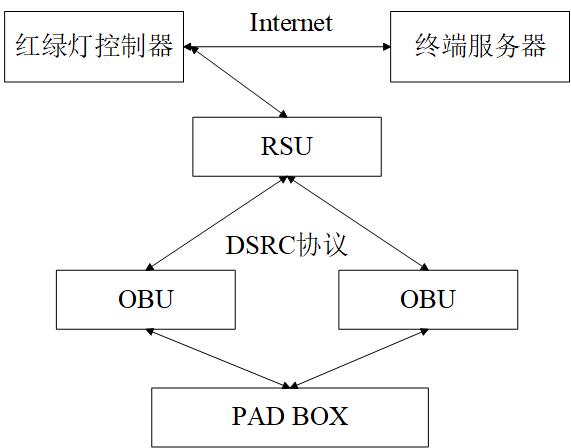
2.2.2 车路协同系统的结构框架
如图2-3所示为车路协同系统的整体框架,其中车载单元由人机交互界面、数据处理模块和通信模块组成,以DSRC协议作为通信协议,车载单元通过BOX与路侧单元进行通信,路侧单元在接收到车载单元的信息后将其发送到服务器端(Server)[2]。服务器可以在收集车辆信息(包括位置信息、速度、车辆数量等)和道路测试设备状态信息(红绿灯周期)后,然后预测交通拥堵并诊断道路测试设备。另外服务器通过与交通灯控制器通信,从而获取对它的控制,进而控制红绿灯的周期,确保车辆的安全行驶以及缓解道路拥堵。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: