基于Modbus-TCP协议的航行器导航数据分发软件设计开题报告
2020-02-18 19:37:16
1. 研究目的与意义(文献综述)
当今,无人水下航行器(UUV)已成为世界各国争相研究的重点,它具有体积小、航行噪声低、自主化程度高、续航时间长和搭载能力强等优点,因而被广泛应用于情报收集、监视、侦查等军事领域,同时,在执行水下目标探测、水温、压力、海流测量等民用领域也发挥着重要作用。对于水下航行器而言,通讯系统的作用就显得格外重要,目前无人水下航行器主要以CAN总线、RS-485 通信和网络通信为主。本次毕业设计期望研究并设计基于工业以太网标准的Modbus/TCP通信协议的无人航行器通信软件,用于管理航行器的导航信息,包括经纬,航向,潜深及姿态等信息,将这些导航信息实时,准确地分发给指定的下级设备。本设计包含服务器端和客户端。要求服务器能够按照指定协议,从数据库中提取对应信息,重新编码,并完成一对多的实时信息分发。局域网中的客户端能够实时接收导航信息,完成数据的提取,并存入指定数据库中。
关于无人水下航行器的研究始于20世纪40年代,主要用来代替潜水员进行深海探测、沉船打捞以及水下作业。无人航行器发展至今,各国的研究重心各不相同,目前以美国与日本两国的发展最为领先,美国的研发侧重于航行器的自主性与续航能力,日本最大的特色是与商业相结合,有较优良的监控管理系统。我国较为突出的“潜龙一号”于2013年在太平洋完成5000多米潜行实验创下我国下潜深度记录。在过程控制与自动化领域,传统的现场设备与仪器仪表多采用4-20mA的模拟信号通信,布线复杂,传输易受干扰,现在现场总线控制技术凭借其系统的开放性与结构的高度分散性已成为发展热点之一。本次设计采用Modbus现场总线控制技术。
2. 研究的基本内容与方案
2.1 基本内容
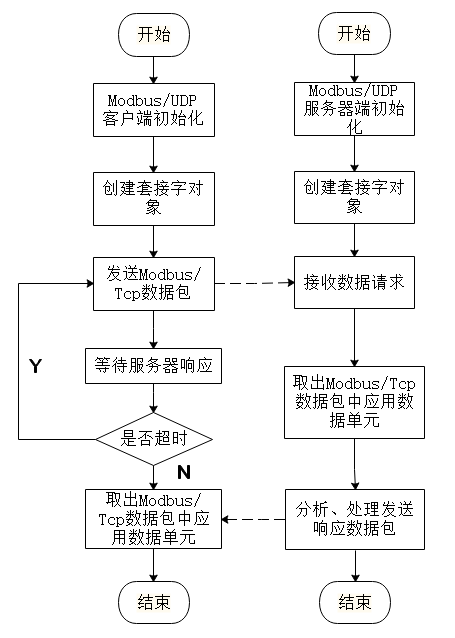
本次毕业设计以无人水下航行器为应用对象,采用modbus总线作为实施方案,利用qt creator软件开发应用程序,水下航行器的数据传输系统包括水面服务器端和与之对应的水下客户端(航行器),两级系统的交互基于标准化的接口和数据格式,航行器通过传感器获得自身位姿、状态等信息,并基于modbus/tcp协议通过光纤和光纤收发器周期性地将位姿状态信息通过构建modbus应用数据单元以报文发送给水面服务器,水面服务器响应航行器的请求完成数据信息的接受、显示与存储。水面监控台也可实时采集操纵面板或监控界面的按钮输入信息,处理后基于modbus/tcp协议实时发给航行器,达到航行器
预期的效果。服务器端和客户端数据收发流程如图所示:
3. 研究计划与安排
1 ~ 3 周:调研、查阅资料、结合毕业设计任务书,确定总体方案,完成开题报告。
4 ~ 6 周:完成通讯协议的设计。
7 ~ 9周:完成通讯协议的调试和软件框架的设计。
4. 参考文献(12篇以上)
[1]丁天成. 无人水下航行器推进系统总线通信技术研究[d].大连海事大学,2017.
[2]马少泽. 水下航行器测控系统控制软件的设计和实现[d].哈尔滨工程大学,2010.
[3]傅金祝. 无人水下航行器与自主水下航行器的价值与发展前景[j]. 2006,(3):1-6.



