基于立体视觉的物体快速定位算法毕业论文
2020-06-17 21:33:47
摘 要
随着科学技术的飞速发展,基于立体视觉的研究和开发也开始快速崛起,机器视觉的研究逐渐受到关注。机器视觉又被称为计算机视觉也被叫做人工视觉,是为了代替人眼来进行监测等工作。目前在很多领域都有应用。视觉导航,产品的检验和监视工作都离不开这一技术。本文选用的是双目视觉进行定位,因为机器的双目视觉更像人的眼睛,更能模仿人类工作。因此对双目立体视觉的研究成为现代机器视觉系统研究的主流方向。
本文主要研究的是双目立体视觉的定位,在进行定位时,采用了综合性能较好的SURF算法。相比SIFT算法匹配效率更快,准确率更高。由于SURF算法在提取特征点时过于依赖主方向,这会在后面的特征点匹配时容易出现匹配不成功,导致错误的匹配点,为了消除或减少这些错误的匹配点,本文采用了RANSAC算法(随机抽样一致算法);为了提高匹配速度,本文加入了FLANN(快速邻逼近搜索函数库)。经实验表明,此方法能够对双目视觉定位的精度和速度有很高的提升。
本文在结构上分为五个章节,后续会一一介绍工作的内容,最后会对本文的工作进行总结以及展望。
关键词:机器人;立体视觉;SURF算法;RANSAC算法;FLANN算法;特征点匹配
Binocular Visual Positioning Based on Improved SURF Algorithm
Abstract
Machine vision is also known as computer vision is also called artificial vision, is to use the computer to simulate the human eye to work, with the rapid development of science and technology, robot vision has gradually been the researchers attention, the current computer vision has been widely used in Various areas such as visual navigation, product inspection and surveillance. Among them, in the classification of robot vision system, binocular stereoscopic vision system is the most widely used, because binocular vision is more able to imitate the human eye.
In this paper, we mainly study the fast positioning algorithm based on machine vision, and use the SURF algorithm with good performance to extract and match the feature points when positioning objects with binocular stereoscopic vision. Because the SURF algorithm is too dependent on the main direction when extracting the feature points, it will appear to be unsuccessful when the subsequent feature points match. In order to eliminate the misplaced point, this paper uses the RANSAC algorithm and FLANN to describe and match the key points with SURF. The experimental results show that the method can effectively improve the accuracy of binocular vision positioning.
This paper is divided into five chapters in the structure, the follow-up will be one by one to introduce the content of the work, and finally the work of this article will be summarized and prospects.
Keywords: robot; visual positioning; SURF algorithm; RANSAC algorithm; FLANN algorithm ;feature point matching
目录
摘要 I
Abstract II
第一章 绪论 1
1.1立体视觉的研究背景及意义 1
1.2国内外发展现状 1
1.2.1国外发展现状 2
1.2.2国内研究现状 2
1.3论文结构 3
第二章 双目立体视觉定位原理及摄像机标定 5
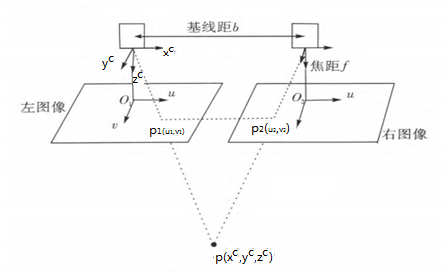
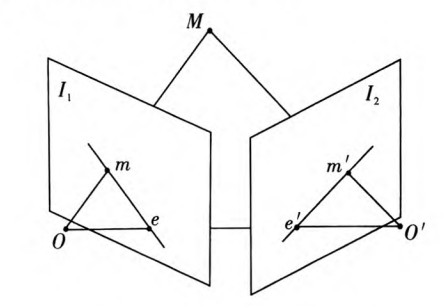
2.1双目立体视觉定位原理 5
2.2摄像机标定 5
2.2.2内外参数的标定 7
2.2.3外参数标定 8
2.3 本章小结 8
第三章 立体匹配 9
3.1 SURF算法 9
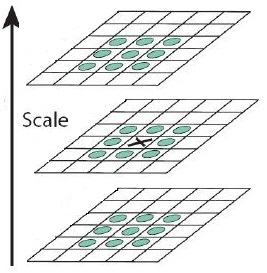
3.1.1特征点检测 9
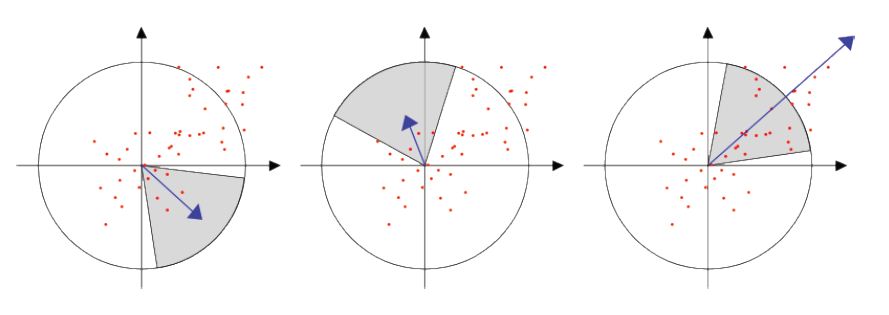
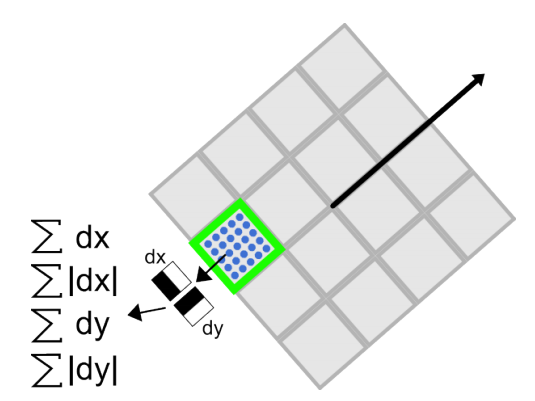
3.1.2特征点描述 11
3.1.3特征点的匹配 12
3.2 SURF匹配算法的改进 12
3.3 本章小结 17
第四章 双目视觉定位的实验测定 18
4.1 实验测定 18
4.2 实验结果误差分析 21
4.3本章小结 21
第五章 总结及展望 22
5.1总结 22
5.2展望 22
参考文献 23
致谢 24
第一章 绪论
1.1立体视觉的研究背景及意义
时代在变迁,科技不断地前进,社会在向前,机器智能已经不再是我们想想而已,它将会是在我们的生活中很常见。计算机视觉就是使用计算机来获取周围信息的学科。进一步来说,比如双目机器视觉就像人的眼睛,在获取目前景物时会得到深度信息,经过对这些深度信息的处理就可以得到目前景物的状态、位置等。
人类在获取信息时,对图片的信息获取效率要远远高于文字。在基于人类视觉系统发展起来的机器视觉系统成为机器人获取信息的重要来源。目前机器视觉发展非常迅速,已经广泛应用到各个领域。机器视觉具有非接触性测量的特点,可以进行对危险场景的感知等情况。
计算机视觉综合了生物学,心理学,数学,计算机科学等学科,在机器智能方面占据着重要的地位,从60年代至今科学家们对其的研究已经取得了非常重大的成果,比如在航天方面,机器视觉被用在探月工程,火星探测工程,为我们对宇宙的探知提供了重要的信息,对于机器视觉的研究,每个国家都是给予大力支持。相信在不久的将来,这将属于机器行业的天下。
相关图片展示: