基于负载扰动观测器的永磁电机无传感器控制毕业论文
2020-06-16 07:07:33
摘 要
永磁同步电机(以下简称)具有结构紧凑,动态性能好,工作效率高等特点,在一些中小功率拖动装置中大量使用。本文从的物理状态入手,讨论了其在和坐标系下的系统建模。本文采用基于矢量控制技术的双闭环结构作为控制系统的基本结构,因此对相关内容进行了介绍。本文还对技术进行了简介。
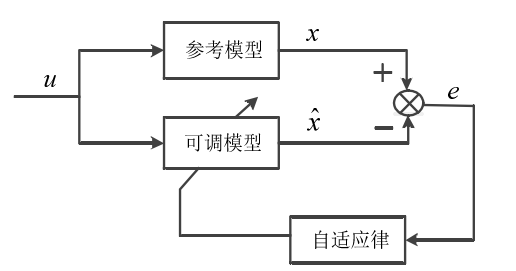
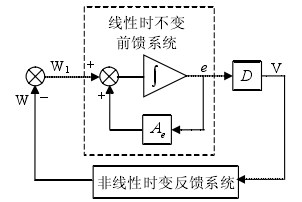
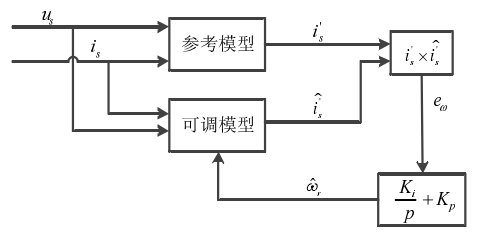
本文分析了的基本原理,指出其关键问题在于自适应律的设计。根据MRAS基本原理结合的数学模型,给出了可调模型的状态方程,并且利用超稳定性理论简要证明了系统在自适应律下的稳定性。最后分析了用于辨识的转子状态(转速和位置)的设计方法。
本文同时介绍了全维和降阶两种观测器的基本原理和搭建手段,并且结合电机转矩方程设计了应用于的具体方案。通过比较发现,降阶观测器结构更加简单,实现容易,故将其选为估算负载转矩的方法。
最后本文构造了基的实验模型,对控制系统和关键模块重点做了介绍分析。测试结果显示,该系统对的估算存在明显偏差,在中速情况下开机能力良好,高速情况下电机速度波动相对严重,低速情况下对转子位置估算不准确,无法稳定工作。该调速系统受到扰动后存在电机震荡的问题。
关键字:PMSM、矢量控制、MRAS、负载扰动观测器
SENSORLESS CONTROL OF PERMANET MAGNET SYNCHRONOUS MOTR USING DISTURBANCE TORQUE BOSERVER
ABSTRACT
Permanent magnetic synchronous motor (here in after referred as PMSM) has a compact structure, well dynamic performance and high efficiency, widely used in a variety of small and medium power control system. In this paper, we start from the physical structure of synchronous motor, based on that, discussed the mathematical model of PMSM both in natural coordinate system and dq0 coordinate system. The double closed-loop structure based on vector control technology is used as the basic structure of the control system, so the related content is introduced in this paper. This article also introduces the SVPWM technology.
This paper analyzes the basic principles of MRAS, pointing out that the key problem here is the design of adaptive law. According to the basic principle of MRAS and the math equation of , the state equation of the adjustable model is given, and the stability of the system under PI adaptive law is proved by Popov stability theory. Finally, the MRAS design method for identifying the rotor state (speed and position) of PMSM is analyzed.
The basic principles and design methods of both the whole order observer and the reduced order observer are introduced, considered the motor torque equation , the design scheme for PMSM in both two observers are given. the reduced order observer is chosen as the method to estimate the load torque, since comparing the two methods, it is simpler and easier to implement.
Finally, this paper builds a simulation model based on MATLAB / Simulink, introduces the control system and the key module in it. The relevant results show a large divergence in the estimation of the burden torsion. Talking about the starting performance, it is good in the medium speed range. The motor speed fluctuation is more serious in the high speed range, and in the low speed range the rotor position could not be estimated accurately and the whole system is not be stable. In this system there is a problem of motor oscillation in the occasion of being disturbed.
Keywords: PMSM , vector control , MRAS, disturbance torque observer
目 录
摘要 I
ABSTRACT II
第一章 绪论 1
1.1 课题研究的背景及意义 1
1.2的基本控制技术 1
1.3无传感器技术的发展及现状 2
1.4 本文的内容安排及主要工作 4
第二章 的数学模型及矢量控制原理 5
2.1的数学模型 5
2.1.1的基本结构 5
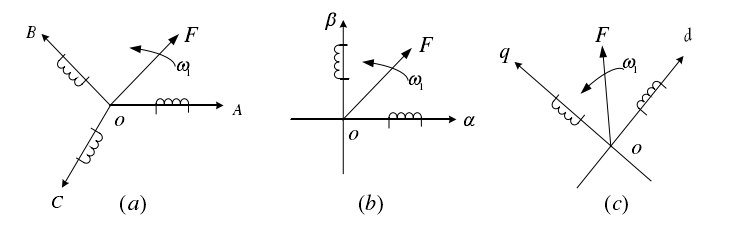
2.1.2在自然坐标系下的数学建模 6
2.1.3的轴数学模型 7
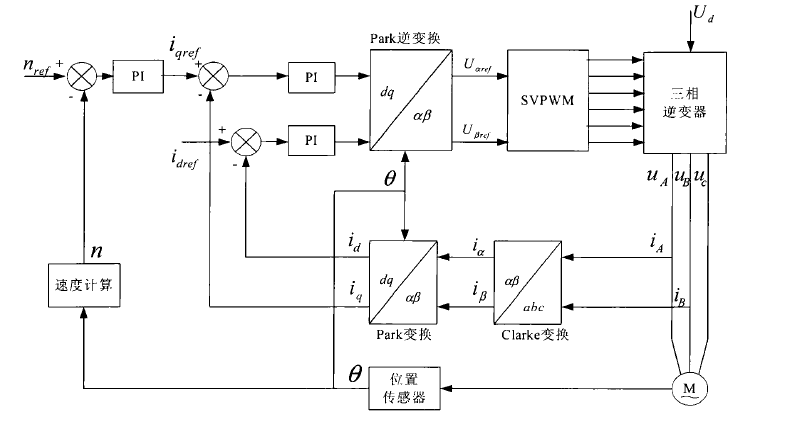
2.2的矢量控制技术 9
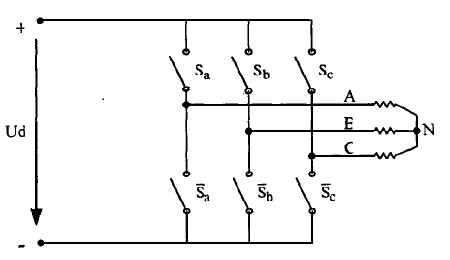
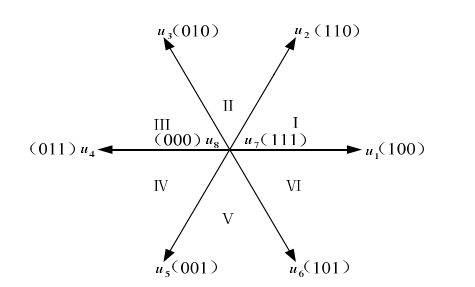
2.3电压空间矢量调制技术 10
2.4本章小结 11
第三章 的无传感器控制 12
3.1 的基本理论 12
3.2基于的的转子位置和速度的辨识 13
3.3本章小结 16
第四章 负载扰动观测器的设计 17
4.1全维状态观测器 17
4.1.1全维观测器基本原理 17
4.1.2应用于的全维观测器设计 18
4.2降阶状态观测器 19
4.2.1降阶观测器基本原理 19
4.2.2应用于的降阶观测器设计 21
4.3本章小结 22
第五章 基于MATLAB的仿真 23
5.1 控制系统的实现 23
5.2基于的仿真设计 23
5.3仿真结果分析 26
5.3.1负载扰动观测器的仿真分析 26
5.3.2调速系统性能的仿真分析 27
5.4本章小结 30
第六章 全文工作的总结与展望 31
本文工作总结 31
未来工作展望 32
参考文献 33
致 谢 35
第一章 绪论
- 课题研究的背景及意义
同步电机作为一种重要的拖动设备,由于其转速由电流频率决定,因此机械特性很硬。以其为核心构成的交流拖动设备存在诸多优点,比如占空间小、相对转动惯量小、可控性好、工作效率较高等。永磁同步电机(Permanent Magnet Synchronous Motor,以下简称)的转子采用稀土金属永磁体制成,相比于普通绕线电机,其转子磁通的密度更高。在相同容量下,体积更小且结构更紧凑,转动惯量更小,因此动态特性更好;而且不存在转子绕线引起的的损耗,效率得到了提高。由于这些突出的优点,广泛应用于航空航天、数控机床、船舶推进、汽车与工业自动化等领域。
的运行状态与转矩角有着密切关系,仅在的范围内才能稳定工作,因此在直接投入电网时,电机的运行存在失步与启动困难两大难题。调速系统运行时受到来自负载、电网电压等的扰动,要获得良好的调速性能,必须对系统进行闭环控制。要实现对的闭环控制并解决失步问题,就必须实现对转子状态信息的测量,通常采用加装机械传感器的方法,常见的有各类编码器,以及旋转式机械-电压转换设备。但外加传感器,特别是加装精度高的机械传感器,会极大提高系统的整体开销,且在某些受到限制的情况下,不允许加装外在机械式传感器件,因此必须实现对调速系统进行无传感器的控制。
相关图片展示: