航天器姿态跟踪控制毕业论文
2020-06-14 16:31:17
摘 要
航天器姿态控制系统是航天器系统中的重要组成部分。随着航天器的快速发展,也小更高的精度来控制航天器姿态。在硬件本身相差不大的情况下,姿态控制方法就显得非常重要。本设计主要采用基于李雅普诺夫分析的非线性控制方法进行航天器姿态控制算法的研究,既有效控制了航天器的姿态,也解决了姿态控制中实际存在的很多问题。
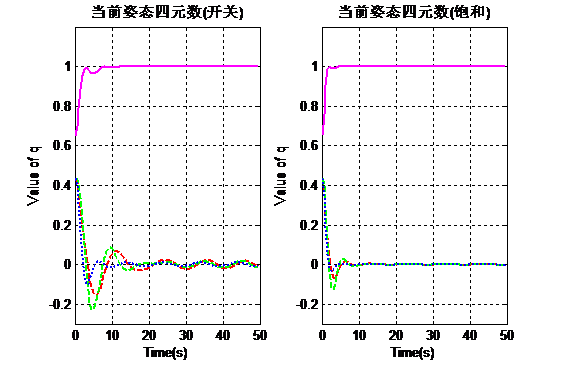
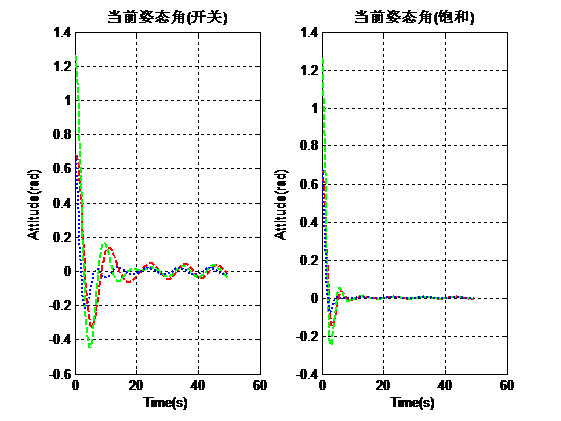
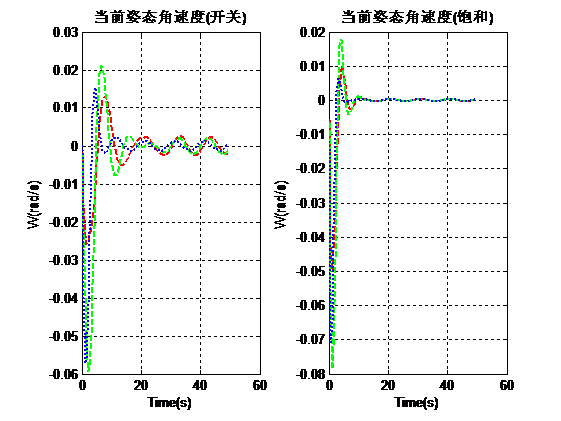
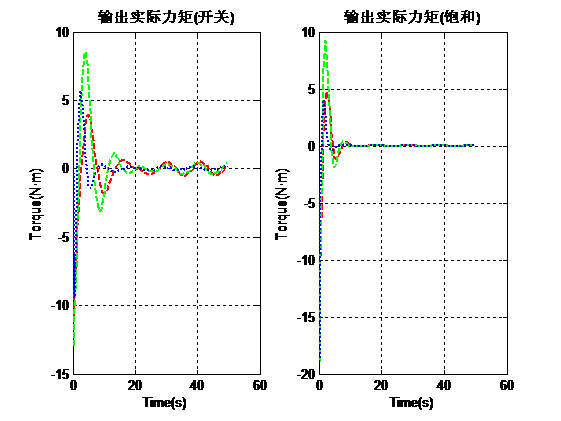
首先利用欧拉角和四元数的原理,设计了航天器在空间中的运动模型。设计了一种滑模变结构控制器,用来来解决航天器运动的非线性。为了让滑动模态慢慢达到恒定状态,而选择合适的滑模向量。为了减小抖振,用饱和特性来替代开关项。并且用MATLAB实现仿真验证。
根据所得到的仿真结论,可以知道到滑模变结构控制系统可以应用于航天器姿态控制。
关键词:航天器,姿态控制,滑模变结构控制,MATLAB仿真
Abstract
Spacecraft attitude control system of spacecraft system is an important part of the . with the rapid development of the spacecraft is higher precision spacecraft attitude control. The hardware itself in similar circumstances, it is very important to the attitude control method. This design mainly uses the research on spacecraft attitude control algorithm for nonlinear analysis of of control based on the method of effective control of the spacecraft's attitude, but also solve a lot of problems in attitude control.
of control based on the method of effective control of the spacecraft's attitude, but also solve a lot of problems in attitude control.
Firstly, the motion model of spacecraft in space is designed by using the Euler angle and the principle of four variables.The spacecraft designed a variable structure controller is used to solve the disorder of the spacecraft motion. In order to make the sliding mode slowly reaches a steady state, it is necessary to design a sliding mode control law. In order to reduce chattering, with saturation characteristics to replace the switch. And using MATLAB simulation.
According to the simulation results, it is easy to know that sliding mode variable structure control system can be applied to spacecraft attitude control. Keywords: spacecraft ,attitude control, sliding mode variable structure control, MATLAB simulation
目录
第一章 绪 论 1
1.1 引言 1
1.2 背景及研究目的和意义 1
1.3 航天器姿态控制系统概述 2
1.4 航天器姿态控制方法研究现状 2
1.4.1李雅普诺夫稳定性定理 3
1.4.2滑模变结构控制 3
1.4.3智能控制 3
1.4.5自适应控制 4
第二章 航天器姿态控制数学模型 5
2.1 姿态敏感器和执行机构 5
2.1.1 姿态敏感器 5
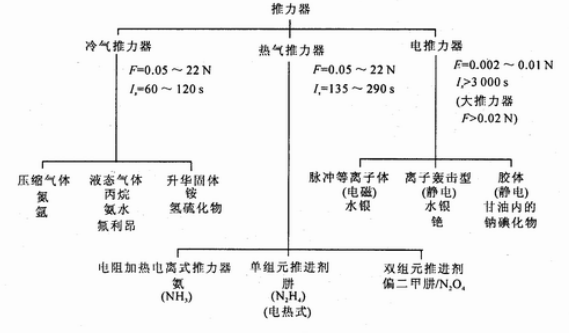
2.1.2 执行机构 7
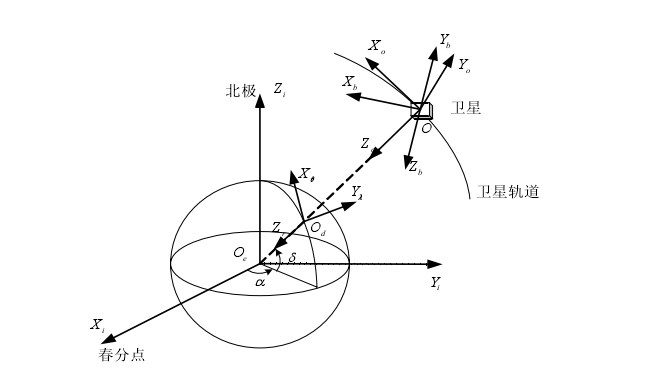
2.2参考坐标系 8
2.3 常用的航天器姿态描述方式 9
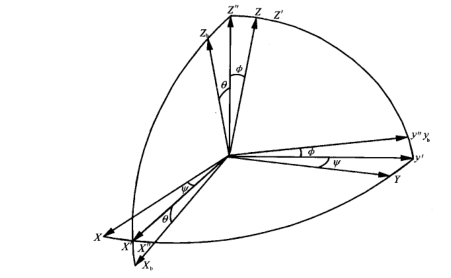
2.3.1欧拉角 9
2.3.2四元数 10
2.3.3欧拉角和四元数的转换关系 11
2.4航天器的姿态运动学方程 11
第三章滑模变结构控制 13
3.1 滑模变结构控制的定义 13
3.2滑动模态的基本特性 14
3.2.1滑动模态的存在条件 14
3.2.2滑动模态的到达条件 14
3.2.3滑动模态的稳定性问题 14
3.3滑模变结构控制系统的设计 14
3.3.1滑模控制系统设计基本方法 14
3.3.2滑模变结构控制器设计 15
3.3.3 仿真算例 17
第四章自适应控制系统设计 22
4.1 自适应控制理论 22
4.1.1 自适应控制的定义 22
4.2 自适应控制系统设计 22
4.2.1 小卫星姿态运动的反馈线性化 23
4.2.2 模型参考自适应控制器的设计 25
4.2.3 仿真算例 27
总结 30
参考文献 31
第一章 绪 论
1.1 引言
从人类向太空发射第一颗航天器开始,许许多多的国家都意识到了太空科技的发展对国民生活和国防的重要性,此后航天技术得到了迅猛的发展[1]。多年来,航天器已经运用于各个方面。科学探测航天器可以进行空间物理环境探测。应用航天器如通信航天器,平时人们最常用的GPS,现在中国大力发展的北斗导航系统等,对人们的出行提供了很大的便利。气象航天器很准确的为人们提供天气预报,资源航天器可以为国家寻找在地面上不易寻找的各种矿产资源,军事航天器可以增强国防实力,虽然在平时我们可能很少听说,也许只是在电视或者是网络上了解到一些关于国家发射航天器的新闻,但是实际上航天器的作用已经渗透到生活的方方面面。航天器技术在不断的发展,准确性和多样性也会越来越多越来越高。航天器对人类社会的发展起了非常重要的作用,并且在以后的作用将越来越重要。
1.2 背景及研究目的和意义
航天器技术的发展会极大地促进各国在太空中各种技术的发展。随着人造航天器功能的复杂多样化,人造航天器的体积和重量都慢慢增加,人造航天器的姿态调整与跟踪等问题便成为了发展航天技术的重中之重。如果无法确定航天器姿态,无法控制航天器姿态,那么航天器技术就没有办法继续开发。因为航天器在太空中飞行,如果不能控制它的运动,它可能就会进行无序翻滚。不同的航天器都有自己不同的任务,所以对不同航天器的飞行姿态也不一样。对航天器进行姿态控制则成为航天器技术发展中必不可少的环节。 航天器发展中最重要的是要研究如何使它的姿态更精确更稳定。航天器姿态控制系统具有很强的非线性,并且没有办法准确描述很多的干扰力矩,所以需要研究的非线性控制器要有很好的鲁棒性。因为滑模变结构可以非常合理的掌握非线性目标不超出范围,所以在目前有的各种方法中受到了很大的关注,但是不规则振动是一个非常大的缺点,局限了滑模变结构的使用。因此怎样才能更好的降低不规则振动,增加精确性,对滑模变结构是否可以被普遍使用起到了关键性的作用。
1.3 航天器姿态控制系统概述
航天器姿态控制是获取并保持航天器在太空定向(即航天器相对于某个参考坐标系的姿态)的技术,包括姿态稳定和姿态机动两个方面[2]。实现航天器姿态稳定和姿态机动的装置或系统称为航天器姿态控制系统[3]。
图1-1 姿态控制系统结构图
相关图片展示: