某纯电动汽车动力系统匹配及整车性能仿真毕业论文
2020-02-14 14:54:04
摘 要
日益发展的汽车行业 给全球环境以及能源带来了巨大的压力,所以要想继续健康的发展汽车行业,需要采取一系列措施,这时纯电动汽车等新能源技术得到了人们的重视。纯电动汽车有效率高以 及污染小的优点,能够缓解目前全球环境以及能源难题。然而,纯电动汽车仍旧存在续航里程不足以及动力性不足等问题。而纯电动汽车的续航性能和动力性能又与其动力总成系统密切相关,对纯电动动力总成关键部件进行合理的选型和参数匹配,能够提高其整车性能,从一定程度上解决其现阶段所面临的问题。本文参照市场上的某款纯电动车型,采用约束匹配法对其动力总成系统进行了匹配仿真研究,首先依据整车动力性能指标进行了动力系统参数匹配计算,然后基于ADVIOSR仿真软件建立了纯电动汽车整车仿真模型,最后通过系统仿真验证了动力系统参数匹配的正确性。
关键词:纯电动汽车;动力系统;ADVISOR仿真;参数匹配
Abstract
The growing automotive industry has brought tremendous pressure on the global environment and energy. Therefore, in order to develop the automotive industry in a healthy way, a series of measures are needed. At this time, new energy technologies such as pure electric vehicles have received attention. Pure electric vehicles have the advantages of high efficiency and low pollution, which can alleviate the current global environment and energy problems. However, pure electric vehicles still have problems such as insufficient mileage and insufficient power. The endurance and power performance of pure electric vehicle are closely related to its powertrain system. Reasonable selection and parameter matching of key components of pure electric powertrain can improve its vehicle performance and solve some problems to some extent. Based on a pure electric vehicle on the market, this paper studies parameter matching of powertrain system by using constraint matching method. Firstly, the types and parameters of powertrain system are determined and calculated according to dynamic performance indexes of electric vehicle, afterwards, simulation model of electric vehicle is established based on ADVIOSR simulation software. Finally, the correctness of parameters matching for powertrain system is verified by simulation analysis.
Key Words:Pure electric vehicles; Power system; ADVISOR simulation; Parameter matching;
目录
摘要 I
Abstract II
第1章 绪论 1
1.1目的及意义 1
1.2国内外研究现状 1
1.3本文主要研究内容 2
第2章 动力系统参数匹配 4
2.1纯电动汽车的基本结构 4
2.2整车基本参数与性能指标 5
2.2.1整车参数 5
2.2.2性能指标 6
2.3动力参数匹配 6
2.3.1电机系统主要参数设计 6
2.3.2电池组的选型及参数设计 10
2.3.3 传动比计算 12
2.4本章小结 13
第3章 基于ADVISOR的纯电动汽车建模与性能仿真 13
3.1 ADVISOR软件介绍 14
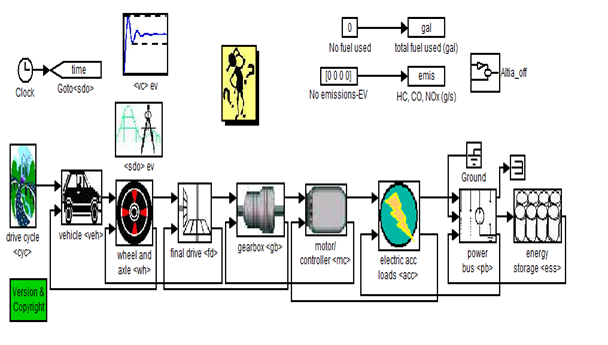
3.2基于ADVISOR的纯电动汽车整车模型构建 14
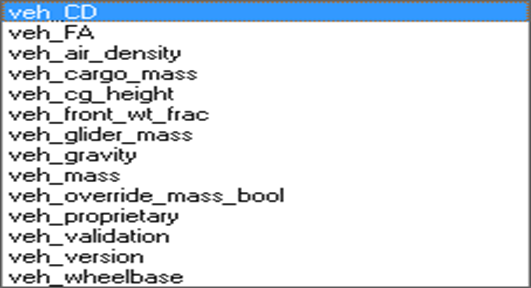
3.2.1整车车身部分模块 15
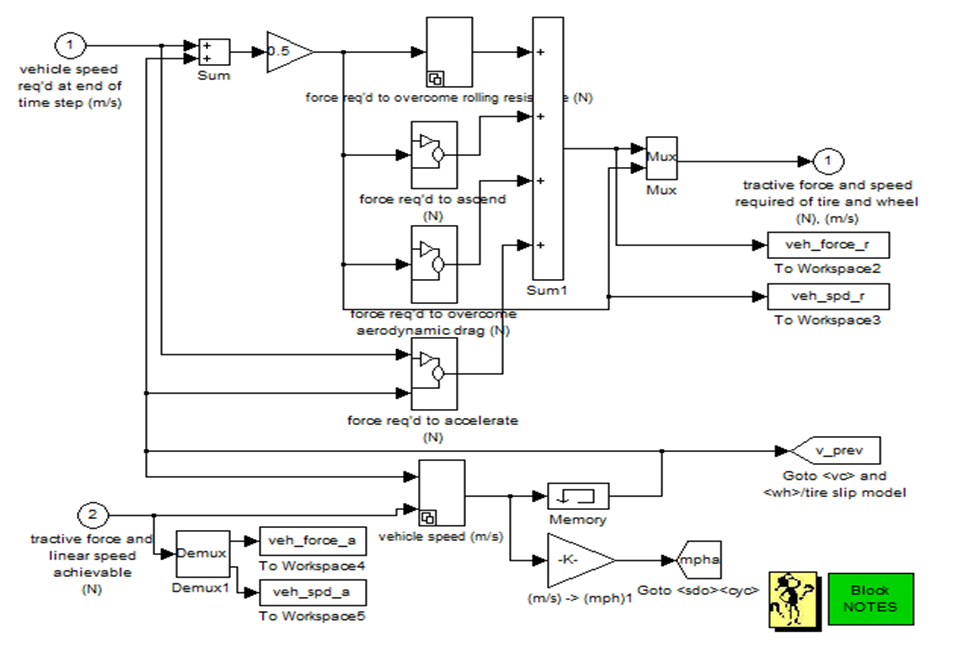
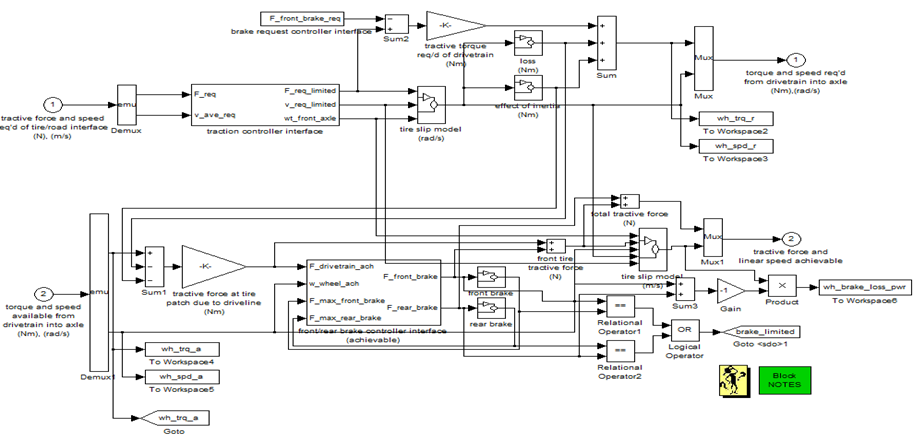
3.2.2车轮模块 16
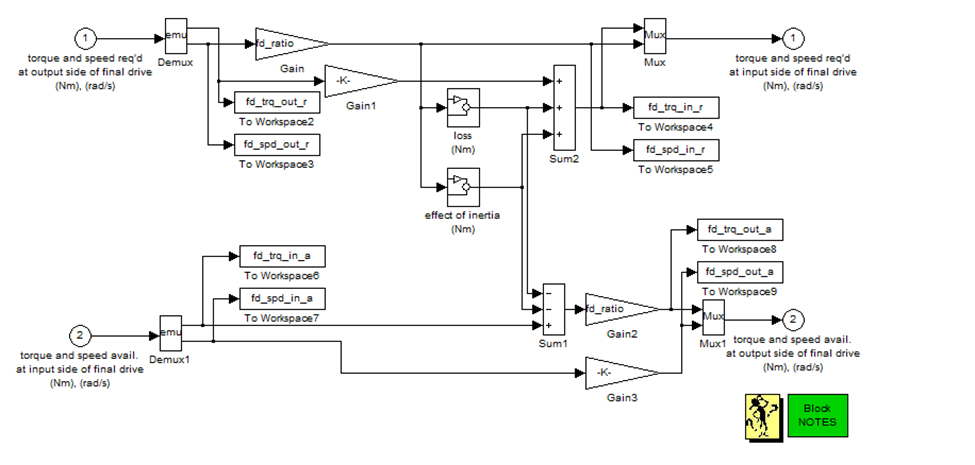
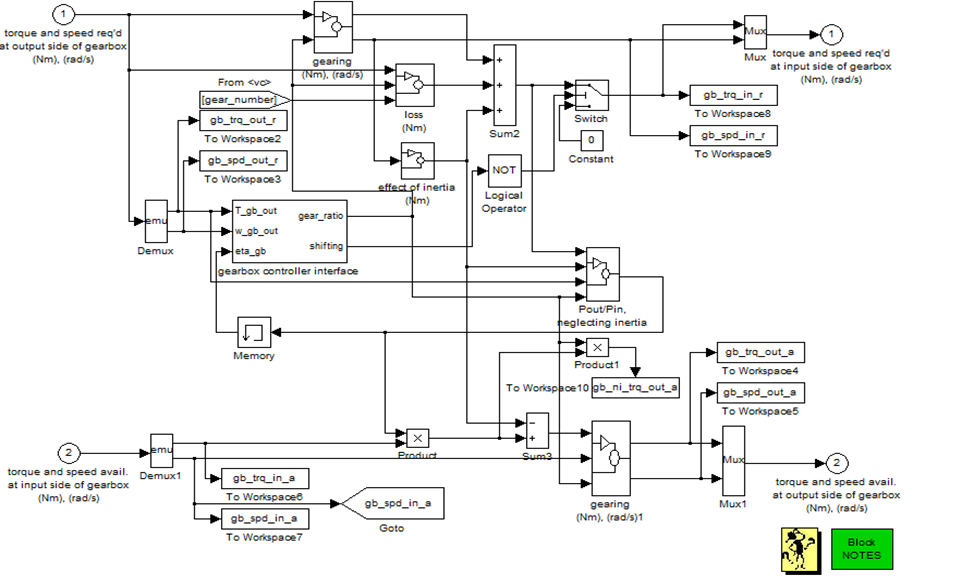
3.2.3变速器与主减速器模块 17
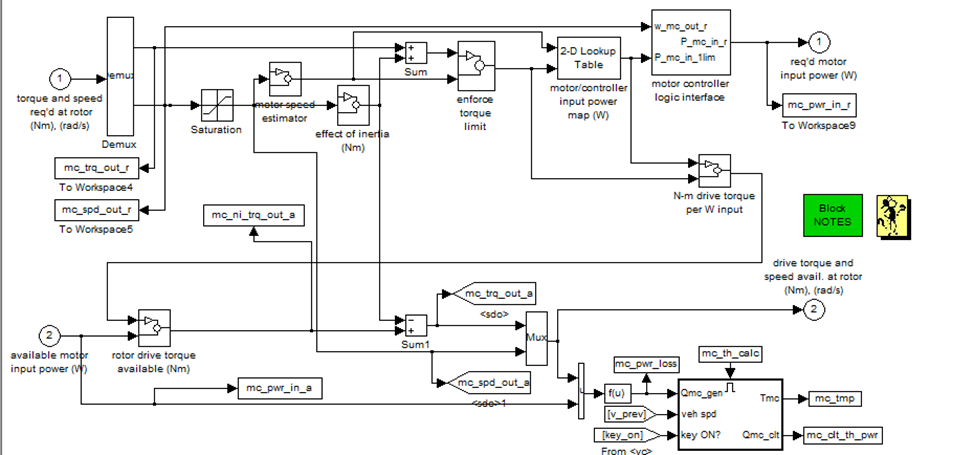
3.2.4 永磁同步电机模块 18
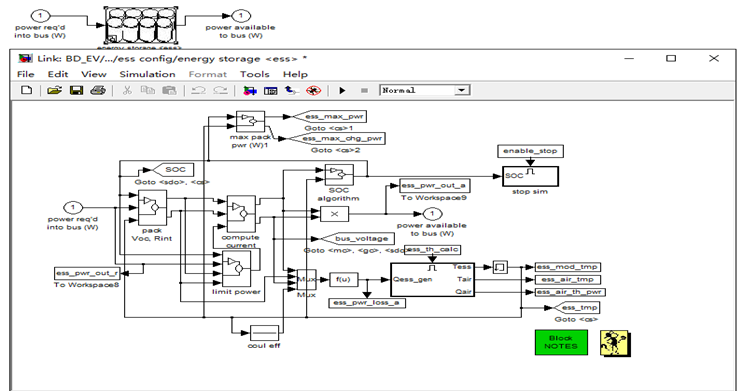
3.2.5锂电池模块 19
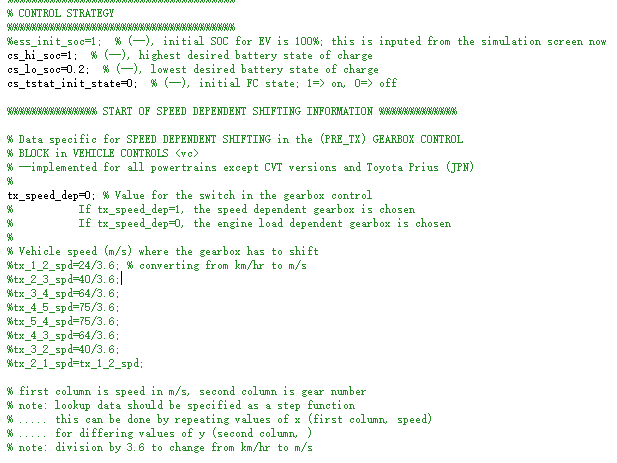
3.2.6控制策略 20
3.3仿真结果及分析 21
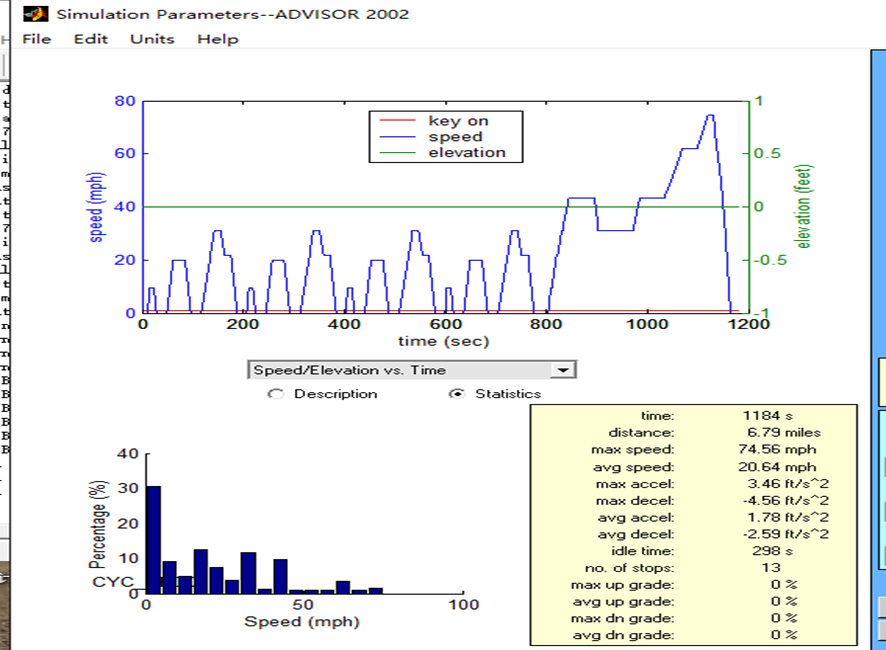
3.3.1NEDC工况的选择 21
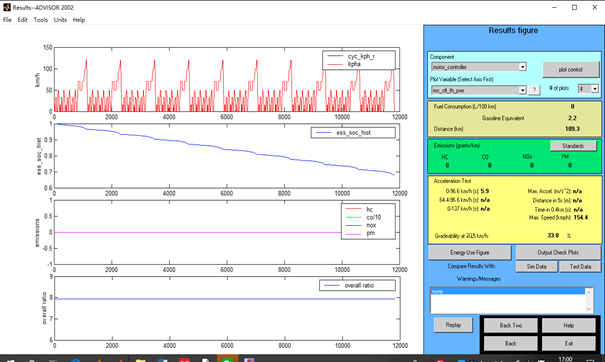
3.3.2仿真分析 22
3.4本章小结 22
第4章 结论 23
4.1全文总结 23
4.2工作展望 23
参考文献 24
致谢 25
第1章 绪论
1.1目的及意义
当今世界,汽车尾气的排放量逐渐增加,对人们赖以生活的生存环境造成了巨大的影响。基于这种情形,发展新能源汽车成为解决环境问题的一种有效方法。纯电动汽车在新能源汽车中占比很重,相对于传统的汽车其可以大大减少二氧化碳(CO2)的排放,当然能量利用率也很高 。因此,大力发展纯电动汽车对解决现在的问题有很大的帮助[1,2]。虽然,近几年纯电动汽车有了不错的发展,但是诸如充电时间长、电池容量不足等问题还是严重制约着纯电动汽车的发展速度[3]。
一辆汽车动力系统的匹配,其决定着所选动力的有效发挥同时也决定这辆车动力性和这辆车经济性的优劣。因此,合理的匹配纯电动汽车的驱动电机,动力电池和传动动力系统(变速器和主减速器)的 参数,可以提高各部件的工作效率,从而提高纯电动汽车的动力性 和经济性。因此对纯电动汽车动力系统进行匹配研究具有重要的意义,一方面可以从一定程度上解决纯电动汽车目前所面临的续航里程短的问题,另一方面也可以提高纯电动汽车的动力性与经济性。
1.2国内外研究现状
纯电动汽车动力匹配研究主要包含两种方法。第一种以满足性能约束条件作为设计目标,称为为参数匹配方法(简称约束匹配方法)。这种方法一般将动力性指标作为参数初选依据,然后在仿真软件中建立模型对其设计参数进行验证。第二种是以若干指标最优为目标的参数匹配方法(优化匹配法)。优化匹配法首先建立纯电动汽车的仿真模型,然后在满足性能约束的前提下应用优化算法以目标函数作为目标进行求解,得到动力系统最优参数。
基于以上两种算法,国内外的研究人员进行了各种研究。
在国内,韩宁针对纯电动汽车zwnj;zwnj;zwnj;zwnj;进行了选型和参数匹配,采用遗传算法对系统参数进行优化,使整车性能得到了很大提升 [4] 。李胜琴等按照整车性能要求,对车辆的驱动电机、锂电电池、传动比等动力参数进行设计匹配,然后通过仿真软件验证到其参数以及能量控制策略可以达到性能要求[5,6]。周飞鲲研究了纯电动 汽车的整车性能需求与影响车辆性能的主要因素,通过对整车性能需求 及影响因素的分析,为纯电动汽车性能优化 提出了可行的方向 和优化目标[7]。周豪也进行了纯电动汽车匹配,并经过仿真验证达到了要求[8] 。丁舟波等人依据纯电动汽车动力性指标进行了参数匹配设计,并通过仿真验证了系统匹配设计的合理性[9]。赵新红等以提升纯电动汽车动力性能为目标,研究了动力系统参数匹配关键技术,从而进一步的优化动力系统参数 [10]。牟海东以车辆的外形构造为框架,对纯电动汽车的部分参数进行了恰当的设计和匹配[11]。李朗等为了降低电动汽车的百公里能耗,针对电动汽车传动比提出了一种基于线性递减惯性权重粒子群算法(LDWPSO)的优化方法。优化结果表明,电动汽车百公里能耗下降了3.7%,性能均满足设计指标[12]。
在国外,Ripujit等人讨论了电动汽车的动力总成设计,该设计强调通过将变速箱与电动机耦合从而有效地延长行驶里程,从而降低电动机的扭矩要求,进而降低电池容量[13]。Pedro等人提出了由四个电动机组成的动力系统,每个电动机都在其中用不同的传动比连接到差速器的后桥上。提出了一种降低能量损失的策略,其中包括两个阶段应用。阶段1使用分而治之的方法来提高整体通过得到电机的最优转矩分布,提高了输出效率马达。第2阶段采用遗传算法求解最优值齿轮传动比,每一代的每一个个体都适用于第一阶段。结果表明,优化后的输出转矩和效率图动力系统的速度。效率的提高和降低通过数值实验,验证了能量损失的有效性驾驶循环[14]。Ustun等人详细的论述在考虑电力传动系统所有重要约束条件的基础上,对驱动系统的设计进行了研究。采用有限元法,在计算机上设计了合适的无刷直流电机环境和影响设计的因素进行了研究[15]。
1.3本文主要研究内容
本文研究的目的是进行纯电动汽车动力系统参数匹配及整车仿真。电池、电机和变速传动机构作为纯电动汽车动力系统的关键部件,其性能水平以及参数配置的合理性直接关系到纯电动汽车的整车性能。本文采用约束匹配法,对纯电动汽车动力系统进行了部件选型和参数匹配设计,在此基础上基于ADVISOR仿真平台验证了系统匹配设计的合理性。本文技术路线图1.1如下:
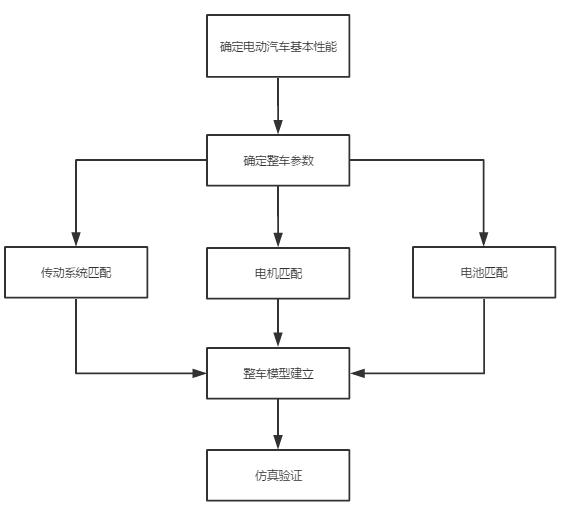
图1.1 技术路线图
本文的章节结构如下:
第一章绪论。本章阐述了纯电动汽车动力系统匹配的重要性,分析了国内外的发展现状,给出了本文的具体研究内容和技术路线。
第二章动力系统参数匹配设计。首先进行纯电动汽车汽车构型分析和选择,然后基于所选择的纯电动汽车结构,确定了整车基本参数和性能指标,最后基于上述参数进行了电池、电机和传动系统参数匹配设计和计算。
第三章纯电动汽车建模与性能仿真。本章首先介绍了基于ADVISOR软件的纯电动汽车整车建模过程,然后基于所建立的整车模型进行了性能仿真,最后通过仿真结果分析验证了系统匹配设计的合理性。
第四章结论。对全文工作内容进行了总结,并对此次毕业设计过程中的不足与需要改进之处进行了展望。
第2章 动力系统参数匹配
纯电动汽车动力系统参数匹配主要是指的是满足整车性能的基本要求下,对纯电动汽车动力系统参数进行合理的匹配能有效改善整车在不同工况下行驶时的性能。本章首先确定整车的结构与性能参数,再经过计算分析选择合适的电机,电池以及主减速器和变速器。
2.1纯电动汽车的基本结构
纯电动汽车传动系统在布置时,按照电机和驱动系统装置位置的不同,可以分成四种不同的动力布置形式,具体样式如图2.1:
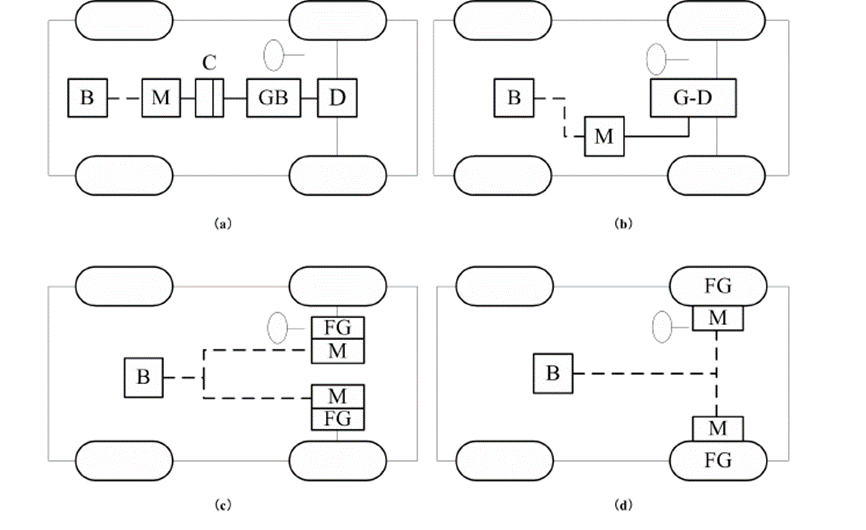
图2.1 纯电动汽车动力系统传动布置
图2.1中 B代表的使蓄电池;C代表的是离合器;D为主减速器;FG为主减速器;GB为变速器;M则代表电机;GD为变速器和主减速器一体。
(1)机械驱动布置式,布置方式见图 2.1(a)。这种形式就按照传统汽车的布置方式,用蓄电池替换内燃机提供能量,然后在以驱动电机来驱动。
(2)机电集成驱动布置式 ,布置方式见图 2.1(b)。这种布置形式不同于传统的汽车,它把机械部件集成为一个整体部件,同时驱动车轮以两个半轴连接。这种布置形式使结构变得紧凑、体积小,从而可以使纯电动汽车布置变得方便。
(3)机电一体化驱动布置式,布置方式见图 2.1(c)。其中用两个牵引电机去替代机械差速器,相应侧的车轮被两个电机所驱动。也正是因为每个电机可以独立控制,使其转速不同,故在车轮转弯时可以保证汽车的操纵稳定性。
(4)轮毂电机驱动布置式,布置方式见图 2.1(d)。该布置形式是与机电一体化有细微的差别,将电机和减速器直接与驱动轮相连,由电机直接驱动汽车行驶。布置空间得到很大提升,传动损失也因此降低。
参考市场上同款纯电动汽车,本文最终确定采用机械驱动布置形式。
2.2整车基本参数与性能指标
2.2.1整车参数
结合本文2.1节,本文采用的纯电动汽车的车型的设计整车参数如表2.1下所示。
表2.1 纯电动汽车整车参数
|
整车参数 |
数值 |
|
整备质量m (kg) 车长(m) 车宽(m) 车高(m) 轴距L(m) 旋转质量换算系数& 车轮的规格 轮胎的滚动半径r(m) 空气阻力系数CD 迎风面积A (m2) 滚动阻力系数 f |
1600 4.68 1.765 1.5 2.66 1.04 205/50 R16 0.305 0.35 2.65 0.01 |
2.2.2性能指标
纯电动汽车动力性主要由三个方面指标来评价[16],即:(1)汽车的最高车速;(2)汽车的百公里加速时间;(3)汽车的最大爬坡度
纯电动汽车经济性,即在动力电池在充放电的范围内,汽车可以行驶的最大续驶行程,其分为等速续驶里程和工况续驶里程。
综合考虑纯电动汽车以上指标,本研究纯电动汽车的性能指标如表2.2。
表2.2 纯电动汽车性能指标
|
性能指标 |
参考值 |
|
最高车速 加速时间 最大爬坡度 续驶里程 |
gt;130km/h 0~100km/h加速时间lt;8s 30%(车速为20km/h) 400km(NEDC综合续航里程) 480km(60km/h匀速) |
2.3动力参数匹配
2.3.1电机系统主要参数设计
在进行过电机的参数匹配时,我们首先要确定选择哪款电机,然后按照车型和设定的整车参数计算电机的功率,转矩,转速等参数。
(1)电机选型
电机选择款式时,要考虑到纯电动汽车的电机需要满足纯电动汽车行驶时的基本性能,还需要满足纯电动汽车行驶时的舒适性、环境适应性等要求。所以,在进行纯电动汽车电机款式的选择时,有以下几点需要满足:1)频繁启动/停车;2)加速/减速;3)低速和爬坡时要求高转矩;4)高速行驶时要求低转矩;5)变速范围大。
根据调查,市场上常用于纯电动汽车的驱动电机主要包括以下几种:1)直流电机;2)异步电机;3)永磁同步电机;4)开关磁阻电机。详细对比如表2.3所示。
表2.3 电机性能比较
|
性能及类型 |
直流电机 |
异步电机 |
永磁同步电机 |
开关磁阻电机 |
|
转速范围 功率密度 重量 体积 可靠性 机构坚固性 控制器成本 |
4000-6000 低 重 大 差 差 低 |
12000-20000 中 中 中 好 好 高 |
4000-12000 高 轻 小 一般 好 高 |
>15000 较高 轻 小 好 好 一般 |
这四款电机中,永磁同步电机的特点是效率高,转矩平衡性好,轻量化水平高和振动噪声低等特点,因此永磁同步电机在纯电动汽车上得到了较为普遍的应用。永磁同步电机还有较强的过载能力,可以在低速时输出较大的转矩,可以在起步及加加速超车时有很大的平稳性很适合纯电动汽车。由前述的整车性能指标可知,该款车需要有较大的转矩和很强的过载能力,故本文选择永磁同步电机作为设计车型的驱动电机。
(2)电机参数匹配
1)电机功率的确定
电机功率计算时,需要满足纯电动汽车在要求工况(NEDC)下的最大功率值,即最高功率需要同时满足最高车速、最大爬坡度及加速时间的要求。
针对汽车的动力性,峰值功率(也可以说最大功率)必须同时大于等于纯电动汽车在最高车速、最大爬坡度以及加速时间行驶情况下的功率,峰值功率可以用如公式2.1表示:
(2.1)
式2.1中分别为满足纯电动汽车最高车速、最大爬坡度以及加速时间的最大功率。
a)最高车速下的功率:
当纯电动汽车以最高车速 Umax(130km/h)在良好的水平路面上直线行驶时,所需的功率为:
(2.2)
本论文所设计的纯电动汽车的最高行驶车速(为130km/h,计算可得纯电动汽车以最高车速行驶时所需功率为36.73 kW。
式2.2中m为车辆质量,按照规定该质量为空载质量和所加附件质量之和①(1780kg); 为整车传动系统效率,0.9;其他参数见表2.1。
b)最大爬坡度下的功率:
在良好的路面上,按照所设定的速度爬上最大坡度路面时需要的功率,就是为纯电动汽车以最大爬坡度行驶时的最大爬坡功率。因此,我们假设汽车以匀速爬坡行驶,汽车所受到的加速阻力等于零,按照汽车所行驶的功率平衡方程可以计算汽车以最大爬坡度行驶时功率为:
(2.3)
本文所设计的爬坡速度Ua为20km/h计算可得以最大爬坡度行驶时所需的功率为32.04kW。
式2.3中:最大爬坡度,30%;其他参数见表2.1。
c)加速时间功率要求:
纯电动汽车的加速性能可以以原地起步加速性能和按照某个初速度去超车时的超车加速性能来确定。本论文参照第一个指标,测试该纯电动汽车原地起步加速性能,因此,该电动车在良好水平路面上以初速度(U=0)加速到末速度(Um=100km/h)所需的功率的计算公式为:
(2.4)
计算可得纯电动汽车在给定加速度下行驶时所需功率为108.19 kW。
式2.4中tm为加速时间,8s。
①见国标GBT 18385-2005
按照上文所计算出三种情形下的功率,为了满足汽车的动力性能,所选取的电机额定功率应满足纯电动汽车对最高车速的要求,峰值(最大)功率应能同时满足对最高车速、加速时间和最大爬坡度三者的要求。
根据市场上电机型号的对比,本文电机的峰值功率设定值为160kW,额定功率设定值为80kW。
2)电机转速的确定
参数匹配中的电机转速主要包含:最大转速和额定转速。
电机按照其最大的转速不同分为低速转速电机、中速转速电机和高速转速电机。其中,低速电机结构简单,但动力较弱,高效工作区间较窄;高速电机动力强,高效区间宽泛,但其结构复杂;中速电机按照使用情况装在中等配置的汽车上。
本文中根据功率大小,选用高速电机。
电机的最高转速与纯电动汽车最高车速的关系为:
(2.5)
由于电机类型为高速电机,根据同类型车辆对比,初选传动比为10。
计算得nmax=11305.8r/min,因此取nmax=12000r/min。
电机额定转速的表达式为:
(2.6)
式2.6中,beta;代表电机的最高转速与额定转速的比值,它是电机扩大恒功率区系数,一般取2-4,因此计算电机的额定转速等于5000r/min。
3)电机转矩的确定
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: