微型自主行驶车辆底盘设计毕业论文
2020-04-12 15:58:45
摘 要
近年来无人驾驶技术得到巨大发展,尤其是在感知、定位、决策和控制领域。目前,大多数科研机构和企业多是采用改装车的方法进行无人驾驶实验,对应用于无人驾驶的底盘的研究还未深入。本文利用Creo对以选择的智能车底盘各零部件建模,并完成各零部件的拼装,得到一个可视化效果。运用Creo对智能小车的三维模型进行仿真和调试,完善智能小车的模型;并根据模型进行小车底盘拼装,并编写电机控制程序,实现智能小车底盘的前进、转向和制动。
通过本文的研究,能够清晰地认识Creo的建模和仿真的方法。该方法为智能车底盘制作提供了良好的平台,对于验证智能车快速实现智能车底盘的搭建具有重要的意义。
关键词:智能车底盘;Creo;建模;电机控制
Abstract
In recent years, unmanned driving technology has been greatly developed,especially in the areas of perception, positioning, decision making and control. At present the test of unmanned vehicle was carried out by means of reloading vehicle for most research institutions and enterprises, but the corresponding research on unmanned chassis has not been carried out in depth. This paper uses Creo to model the parts and components of the selected intelligent vehicle chassis, and completing the assembly of each part and get a visual effect. Besidesthe 3d model of intelligent car is simulated and debugged by using Creo to perfect the model of intelligent car and the car chassis is assembled and the motor control program is written to realize the advance, steering and braking of the intelligent car chassis according to the model.
Through the research of this paper, the modeling and simulation methods of Creo can be clearly understood. This method provides a good platform for the production of intelligent vehicle chassis, and is of great significance to verify the rapid construction of intelligent vehicle chassis.
Key Words: Chassis of Intelligent Vehicle;Creo; Modeling; Motor control
目 录
第1章 绪论 1
1.1 研究的背景与意义 1
1.2 研究现状及发展趋势 1
1.2.1转向系统方面 1
1.2.2动力系统方面 1
1.2.3主避障系统方面 2
1.2.4底盘方面 2
1.3 本课题主要的研究内容 2
1.3.1 主要研究步骤 2
1.3.2 主要章节概括 2
第2章 智能小车原理及设计要求 4
2.1智能小车的控制概述 4
2.2 智能小车综述 5
2.2.1 行驶系统 5
2.2.2 能源系统 5
2.2.3 电池 6
2.2.4 电机的选择 6
2.2.5 避震系统 8
2.2.6转向系统 8
2.3本章小结 8
第3章 智能小车CREO模型的构建与仿真 10
3.1 CREO软件介绍 10
3.2 智能小车Creo模型的建立 10
3.2.1 智能小车各零件模型的建立 10
3.2.2 智能小车模型的装配 20
3.3 智能小车CREO模型的仿真 23
3.4 本章小结 26
第4章 智能小车电机驱动的程序控制 28
4.1 CodeWarrior软件介绍 28
4.2 控制程序的编写 28
4.3 控制程序的检验 31
4.4 本章小结 32
第5章 结论与展望 33
5.1 工作结论 33
5.2 展望 33
参考文献 34
致 谢 35
第1章 绪论
1.1 研究的背景与意义
随着智能小车在近几年的飞速发展,智能小车的研究已经从智能玩具发展到到各行业,其主要可实现的功能有循迹、避障、检测贴片寻光入库、避崖等。比较出名的飞思卡尔智能小车更是走在[1],自主行驶车辆也叫无人驾驶车辆,是一个集环境探测、决策规划和多种辅助驾驶等功能于一体的综合行驶系统,智能偱迹小车可广泛应用于军事侦察、勘探、矿产开采等不便于人实地堪察的情况,加以改造,可应用于军事反恐、社会治安维稳等领域,从而实现最大限度的防止人员伤亡,保留战斗实力的目的,所以,智能小车的研究有着重要的军事和经济意义。由于汽车工业的快速发展,其与电子信息产业的结合速度也明显提升,汽车行业逐渐向电子化、多媒体化和智能化方向发展,使其在作为一种代步工具的同时又具备交通、文娱、办公和通信等多种功能。本课题将进行微型自主行驶车辆的底盘设计。
1.2 研究现状及发展趋势
目前对微型电动智能汽车的研究主要包括以下几方面:转向系统、动力系统、自主避障系统、底盘的布置这几方面。
1.2.1转向系统方面
西北农林科技大学的张国远采用四轮转向技术,增加平台机动灵活性能,可显著改善高地隙平台的机械性能[2];中北大学刘志岗提出一种新的转向方式,在原有普通差速器基础上进行结构改进,并借鉴限滑差速器的功能特点和履带式车辆的转向方式,提出辅助转向差速器的原理设计[3]; 武汉理工大学胡国强对四轮转向车辆的操纵稳定性评价指标进行了分析,又对四轮转向车辆与前轮转向车辆运动进行比较,结果表明四轮转向的操纵稳定性比前轮转向好很多[4]。可见,差动转向系统结构简单,适用于智能小车。
1.2.2动力系统方面
湖南大学周伟运用仿真软件AVL Cruise模块化的平台,搭建了相应的纯电动汽车模型进行仿真计算,对于提升微型纯电动客车整车动力性、提升续航里程有一定的指导意义[5]。华东理工大学肖华桥以新能源电动汽车为背景,以燃料电池为主能源,镍氢电池为辅助能源,从电机的损耗出发,通过电动汽车电机的数学模型来计算效率,针对损耗模型进行分析计算,得出最优条件下对应的各种参数,从而显著地减小电机的各种损耗量[6]。沈阳工业大学闫峰研究并设计了更为高效且易于实现的混合动力汽车动力匹配控制系统,通过对比电力辅助式混合动力驱动控制系统,验证了该动力系统仿真模型及控制策略的正确性与可行性[7];国外学者模拟Matlab/Simulink环境下的仿真结果和电机的额定峰值、功率动态车辆的估计和相应的齿轮箱的设计与印度驱动循环整个操作所需的加速和爬坡性能[8];通过讨论计算混合动力汽车最大功率要求的步骤,说明了各种混合动力汽车的结构并提出了一种算法对电机的选择从而确保电机不太大或太小[9]。
1.2.3主避障系统方面
南京航空航天大学孙兰兰分析了几种典型的陷阱环境,通过设置虚拟目标点的方法进行陷阱避让,给出了具体实现方案设计了自主避障系统的研究和设计[10]。西安科技大学翟林静在自主避障系统的研究中,将Kinect与无人驾驶小车相结合设计了一种小车自主避障行驶系统[11]。
1.2.4底盘方面
长春理工大学聂焱研究了非路面全向电动底盘系统,通过对底盘关键结构部件的有限元分析,保证了底盘结构在正常行驶下的强度要求,通过对底盘虚拟样机的动力学仿真分析,完成了对底盘转向方式的选择,并给出了高、低车速的转向建议,对于全向电动车辆研究具有一定的参考意义[12]。山东建筑大学董旭研究了履带式越障车底盘。在不同的工况下,分别对履带式越障车底盘进行动态特性分析,通过对底盘的运动学仿真,得出不同路况下车辆的位移曲线图、速度曲线图以及加速度曲线图,为运动学的控制提供数据支持,结合运动学的理论分析和仿真计算结果对底盘运动稳定性提出改进优化的方向[13]。国外学者通过快速原型动力循环底盘开发硬件(BAAM),设计了车辆底盘,并分析了电池电量和量程扩展器操作的底盘测功机结果,以显示该机构的好处[14]。
1.3 本课题主要的研究内容
1.3.1 主要研究步骤
(1)学习掌握绘图软件CREO的建模与装配技术[15];
(2)调研微型自主行驶车辆底盘结构及工作原理;
(3)确定底盘结构并进行底盘结构设计与部件选型;
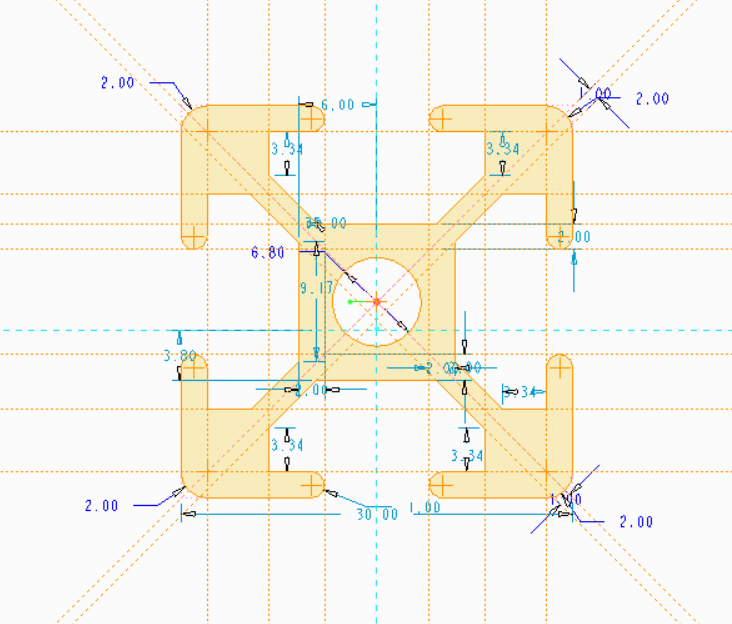
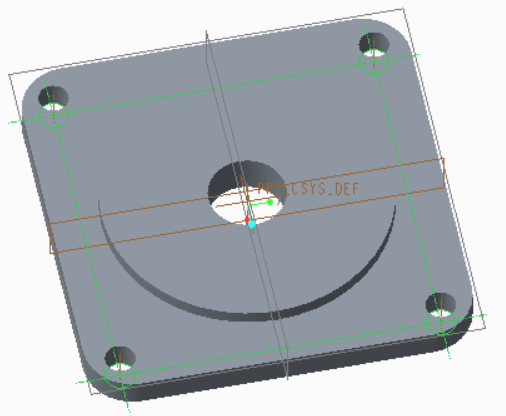
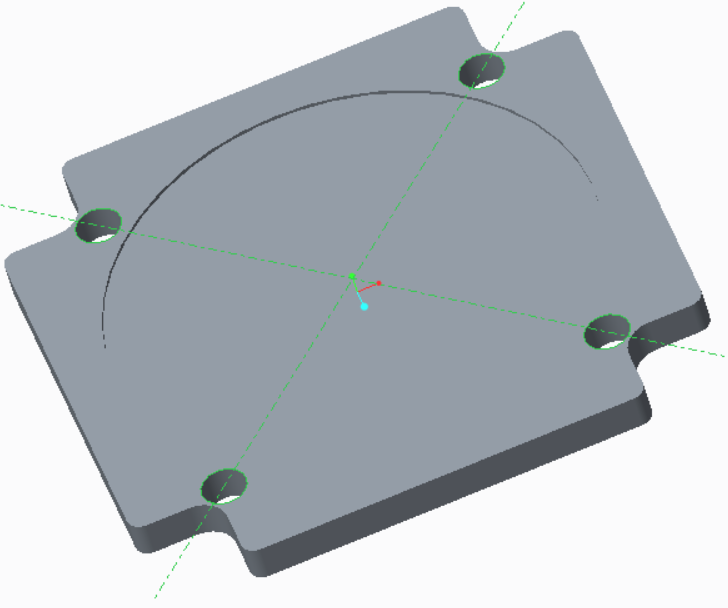
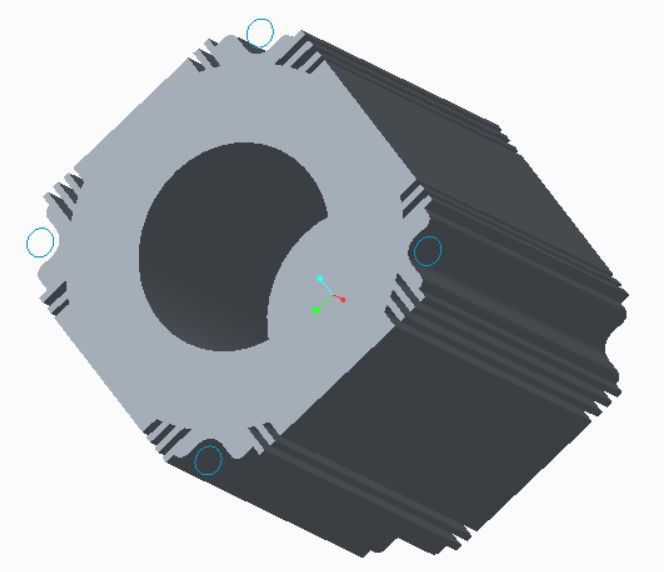
(4)利用CREO进行智能小车的三维建模,并完成智能小车各组成零件的建模及装配;
(5)初步设计底盘驱动控制电路软硬件,初步实现底盘的前进、后退与转向。
1.3.2 主要章节概括
第1章主要介绍了本课题的研究背景与意义,讲述了本课题的研究现状以和发展趋势, 并且对本课题的主要的工作内容进行了介绍;
第 2 章介绍了智能小车原理和设计要求,包括智能小车整体的概述,微型无人驾驶小车底盘设计的综述,以及本课题简化的智能小车模型结构;
第 3 章主要介绍了使用 CREO构建智能小车的三维模型的过程,具体包含CREO软件的简介、 智能小车CREO模型的建立与装配,以及智能小车CREO模型的仿真;
第4章介绍了智能小车空间运动的程序控制,CodeWarrior软件介绍、控制程序的编写以及控制程序在实际实验中的检验[16];
第 5章阐述了本文研究内容的结论,并且对今后的工作内容做了一个简单的展望。
第2章 智能小车原理及设计要求
2.1智能小车的控制概述
智能车的制造过程主要包括了自动控制、模式识别、传感器、电子、电气、计算机、机 械与汽车等多学科内容。在这些内容中,将智能车的控制模块可以划分为如图 2.1 所示的形式:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
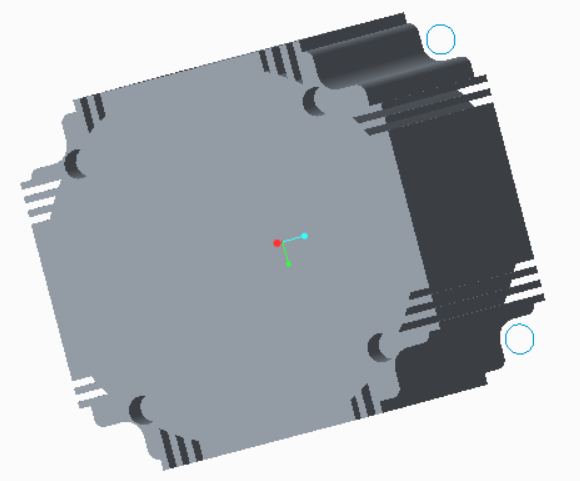
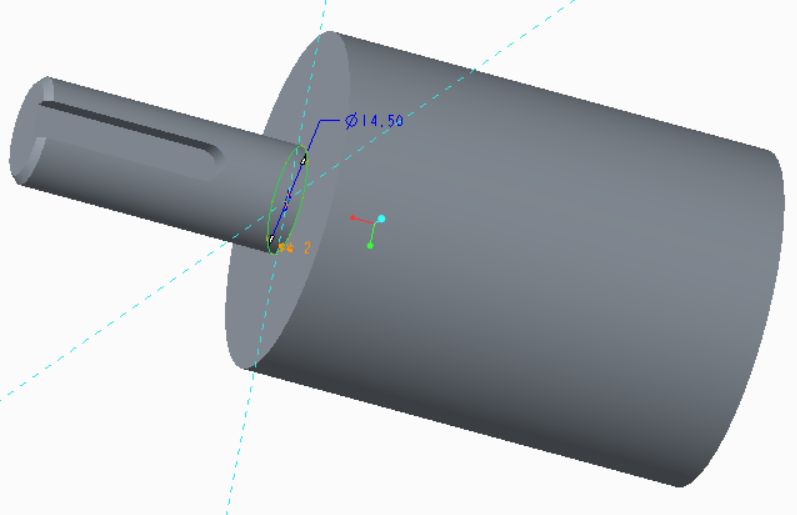
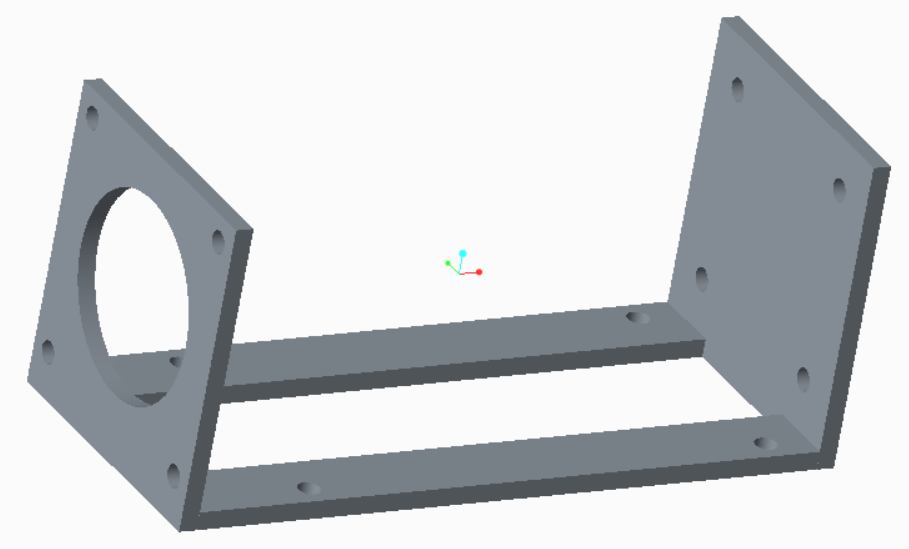
相关图片展示: