海洋平台双桨补给船动力装置设计外文翻译资料
2022-09-16 10:25:08

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
|
Integrated Design and Realization of a Hubless Rim-driven Thruster Min-Fu Hsieh, Jeng-Horng Chen, Yu-Han Yeh, Chi-Lu Lee, Po-Hsun Chen, You-Chiuan Hsu, and Yen-Hung Chen Department of Systems and Naval Mechatronic Engineering National Cheng Kung University Tainan, Taiwan, R.O.C. E-mail: mfhsieh@mail.ncku.edu.tw Abstract-This paper presents the integrated design and realization of a hubless rim-driven thruster for remotely operated vehicles (ROV). The design process considers the integration of hydrodynamics, propeller design, motor design and driver design. The integration technique is particularly emphasized, where the output of the motor should match the characteristic of the propeller. Also, for such a hubless rim-driven construction, the motor is embraced within the duct, and the motor size will consequently determine the duct thickness. Therefore, the drag force due to the duct should be analyzed and calculated as a design consideration for the propeller and motor. The specifications of the thruster are determined based on the thrust requirement of the target ROV. Several types of software are used for analyses of hydrodynamics, motor magnetic field, etc, and the design information is exchanged around. The rim-driven thrust is successfully designed, and a prototype is manufactured and tested for functionality. Index Terms-remotely operated vehicle, thruster, rim-driven thruster,motor design, propeller design I. INTRODUCTION The oceans cover approximately 72 percent of the Earth surface, and therefore there is plenty for humans to explore. As a country surrounded by seas and oceans, Taiwan is obligatory to pay more attention to the research and technology concerning oceans. Significant effort has been put in research on underwater remotely operated vehicles (ROVs) or autonomous underwater vehicles (AUVs) for exploring over the oceans and performing required tasks. The key technology for underwater vehicles includes material, mechatronics ,hydrodynamics, communication, positioning and navigation,etc. With a complex oceanic environment and the strong current surrounding Taiwan, it has become a severe challenge for commercial underwater vehicles to operate at this area.This leads to a necessity to develop a capable vehicle.Figure 1 presents an ROV developed by the joint team of National Cheng Kung University (NCKU) and National Sun Yat-Sen University (NSYSU) in Taiwan. It is realized that, in addition to the hydrodynamic characteristics of the ROV itself,the thruster capability can be a key to the enhancement of the system performance under strong current. Some research is found on development of high performance thrusters [1-2].Figure 2 shows a conventional thruster with the motor and hub in the duct center, which would expectedly affect the flow. In contrast, the 'hubless' thruster is shown in Fig. 3, which should have a better hydrodynamic performance. This type of thrusters can be called the 'rim-driven thrusters,' whose motors are constructed as the rim and embedded into the duct.In addition to the hydrodynamics aspect, the potential safety problem, i.e., propeller tangling is another major consideration. Common thrusters as seen in Fig. 2 can be easily tangled by foreign matters or ropes and cause danger to the vehicles.Without the hub (Fig. 3), the tangling can be easily avoided.
This paper is dedicated to the development of an efficient propulsion system and presents the entire design process for the hubless rim-driven thruster. Via the multidisciplinary integration, i.e., hydrodynamics, propeller shaping,electromagnetics, and driving circuits, the integrated design can therefore be accomplished and a high performance and efficiency propulsion system can be achieved. Each of the above four sub-topics requires intensive design in order to accomplish the target thruster. This paper is arranged as follows. In Section II, the multidisciplinary design process for the thruster is discussed.Section III describes the design results and system integration,and theexperiments are presented in Section IV. Conclusions are finally given in Section V. II. THRUSTER DESIGN The design process for the thruster can be explained with the flow chart in Fig. 4. The thruster specifications are given based on the speed of the sea/ocean current where the ROV expect to be operated. This will decide the thrust required to be generated by the thrusters. With the given specifications ,the propeller should first be designed to meet the thrust requirement. Because this is a rim-driven thruster, the duct is where the motor locates (embedded in the duct). Hence, the duct size will depend on the motor size, which also has relations with motor output power. Consequently, this duct size will generate a drag force under flow, and this drag force should be taken into account for the overall thrust of the propeller. Therefore, from the above description, all component characteristics are related to one another and should be designed in an integrated manner.
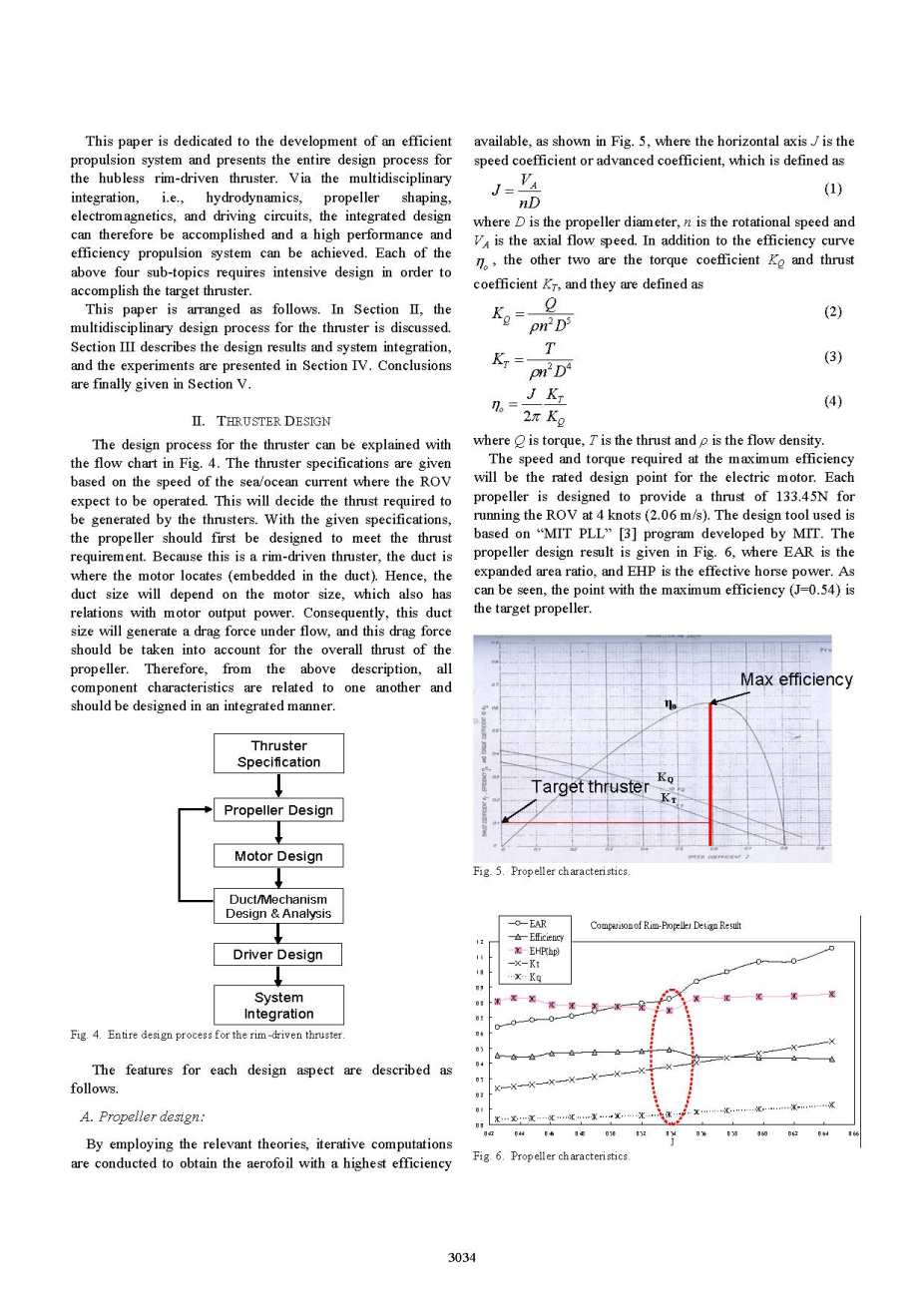
The features for each design aspect are described as follows. A. Propeller design: By employing the relevant theories, iterative computations are conducted to obtain the aerofoil with a highest efficiency available, as shown in Fig. 5, where the horizontal axis J is the speed coefficient or advanced coefficient, which is defined as (1) where D is the propeller diameter, n is the rotational speed and VA is the axial flow speed. In addition to the efficiency curve C, the other two are the torque coefficient KQ and thrust coefficient KT, and they are defined as (2) (3) (4) where Q is torque, T is the thrust and p is the flow density. The speed and t 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[148664],资料为PDF文档或Word文档,PDF文档可免费转换为Word |



