船舶动力定位(DP)系统的功能和任务外文翻译资料
2022-07-26 20:48:56

英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
罗马Smierzchalski
控制工程系
格但斯克理工大学
格但斯克,波兰
电子邮件:roman.smierzchalski@pg.gda.pl
摘要
本文讨论了船舶动力定位(DP)系统的功能和任务。 分析的问题包括船舶转向,特别是在低机动速度下稳定船舶位置和运动方向(实际路线)
和常用的DP船型。 引用了分类社会对DP船舶的要求。 提出了DP控制系统的多层结构,特别注意信号过滤,测量和非测量量的估计,选择控制等问题。
方法和DP控制器,方向舵和驱动器分配。 该文件的形式概述了DP船舶控制的基本问题。
关键词:DP船舶定位结构,动态定位,船舶模型,DP船舶要求
. 动态定位(DP)
在海洋导航中,可以命名两种基本的船舶转向模式,即:沿轨迹转向和动态定位(DP)[4]。由于海洋和海床矿物和原油勘探技术的飞速发展,以及海上风能产业等形式
水下活动越来越受到研究人员的关注,正在考虑如何有效控制用于服务上述类型活动的动态定位船。 DP控制特别适用于在没有系泊系统帮助的情况下,应以一定的精度稳定位置和航向的船舶。分析由DP执行的控制功能和任务
我们假设船舶具有动态定位能力(DP),如果能够以一定的精度保持其位置和方向(航向)。为了执行这些功能,船舶配备有专门的自动控制装置
以及能够在三个方向控制船舶运动的系统。在专门的钻井船舶用于在大海深处寻找原油的情况下,这种船舶的能力特别重要。 DP系统还用于控制复杂的海洋物体,例如:挖泥船,钻井和生产平台的供应船,运输油罐,在海底铺设电缆和管道的船舶,产品油轮,巡航船和水文研究船。动态定位任务还可以指电缆铺设在海床上的精确转向,例如在窄通道,端口等中的低速机动。
上述船只通常以低速执行任务。 船舶转向的基本方法考虑了船速,区分低速和高速。船舶运动速度低于2 m / s [2,3,4]为低。 以这种速度进行的控制过程包括动态定位,其目的是保持恒定的地理位置和方向(实际)
船舶,即相对于北(N)船的船角(其他名称保存,消声)的角度,不管作用在其上的扰动(图1)
动态定位在船舶转向中构成了一组特殊的问题。它包括以下任务:扩展卡尔曼滤波估计测量方向,位置,速度和加速度值,控制多维非线性系统,预测控制,螺旋桨分配,优化能量供应,适应参考模型等。 [6,7]。船舶位置由一个或多个参考设备测量,航路信息由陀螺仪传送。设定值和测量值之间的差值被解释为误差,DP系统自动起作用以最小化该误差。动态定位精度需要先进的控制算法[12]。假设船舶运动控制在三个方向上独立发生,分别是:纵向(浪涌),横向(摇摆)和弓形偏转(偏航),后者也称为实际偏转或回转。 2)。 DP转向系统利用船舶螺旋桨,推进器和方向舵系统
补偿由风,海浪和海流产生的海洋环境扰动,并作用于船体。
DP系统的准确定义可以在船级社颁布的规定中找到,例如在[1]中,根据IMO海事安全委员会[7]和[5]的决议。
对DP船舶的要求
船上安装的DP系统使其任务和操作特别是原油生产更加容易。这些船舶可以在没有拖船帮助的情况下履行其功能,其操作也具有对天气条件或运行参数变化的快速反应的特征。所有这些都增加了其使用的多功能性。 DP系统的缺点是应用解决方案的复杂性很高
因此,它们对组成系统的特定设备的故障的敏感性。可能严重影响DP系统运行的样品扰动包括电源故障,缺乏推进,即推进器故障,
和/或致动器故障,或自动控制或测量系统。关于动态定位系统的要求在船级社规定的基础上,根据海事安全委员会发布的IMO决议645号通知[7]。为确保海上安全,本决议规定了船舶定位过程的范围,以及涉及控制系统的结构,设备,运行,运行和维修的必要要求,以及
用于测试DP船舶是否符合这些要求的方法。船级社颁布的规则,如ABS,DNV和劳埃德船级社以及其他出版物[8,9]中也列出了详细的要求清单。我们可以假设主要要求是DP船在出现不可预见的随机故障或特定系统组件的故障运行之后保持执行其基本功能的能力。定义DP系统类别的评估参数是其对某些个别故障的抵抗力。为了提高其运行安全性和可用性水平,现代DP系统解决方案配备了二次多余的设备。海事安全委员会通过的决议645 [7]定义了三大类DP系统的安全要求和必要的设备。而1级则不需要冗余
3级需要最高级别的设备倍增 - 最多3个。冗余意味着选定的多余设备或系统的数量,确保船舶运动的可用性和操作安全性,相对于其位置和方向保持。 冗余确保了螺旋桨系统,发电机组,配电系统,计算机系统和位置评估系统等船舶系统发生故障后船舶运动的连续性。 冗余
例如在DP能力的暂时丧失不会对人身安全或设备故障造成威胁的研究活动中,海上某些作业是不需要的。
B. DP船舶的型号
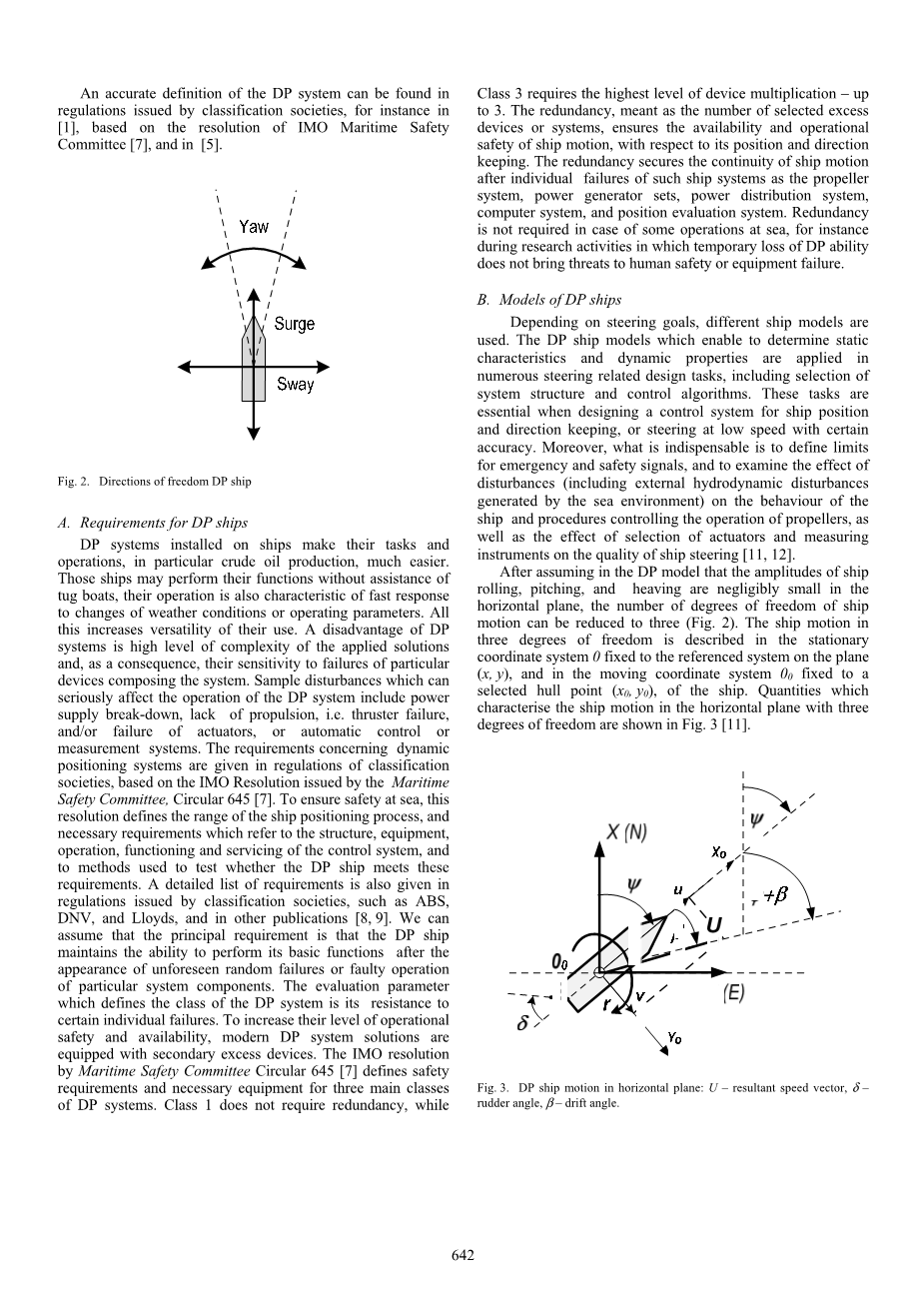
根据转向目标,使用不同的船型。能够确定静态特性和动态特性的DP船模型应用于众多与导向相关的设计任务,包括系统结构和控制算法的选择。这些任务在设计用于船舶位置和方向保持的控制系统或以低速转向时具有一定的准确性。此外,不可缺少的是定义紧急和安全信号的限制,并检查干扰(包括海洋环境产生的外部水动力干扰)对船舶行为和控制螺旋桨运行程序的影响,以及选择执行器和测量仪器对船舶转向质量的影响[11,12]。在DP模型中,在水平面上船舶滚动,俯仰和起伏的幅度可以忽略不计,船舶的自由度数
运动可以减少到三(图2)。在三维自由度的船舶运动在固定在参考系统的平面(x,y)上的固定坐标系0和固定在选定船体点(x0,y0)上的移动坐标系00中进行描述船。在三个自由度的水平面中表征船舶运动的数量如图1所示。 3 [11]。
34/5000
II。 DP控制系统的结构
DP船的控制系统可以呈现为多层船舶控制系统[11](图4)
在DP船舶控制系统的多层结构中,重要的是控制层和导航块(图5)。船舶命令层没有
参与控制过程,如大多数DP操作模式,所有转动点和参数的所有设置都由操作员直接引入,而不是
自动计算。因此,在DP船舶控制系统中可以省略命令层。根据早先采用的假设,DP控制以较低的船速进行,并要求操作者设置要达到这些点的转向点和参数。这些参数包括实际课程,船舶应达到特定的转折点,速度和转弯
这些点的方法的半径。以上数据为采用动态定位系统的改进结构提供了依据(图5)。该系统包括两个控制回路:具有高级反馈的开环,其中由风模块产生反馈信号,以及将设定位置和过程参数与估计值进行比较的闭环。在DP控制系统中,由于具有一定精度的位置保持任务的特定性质,引入了一些附加块。该系统基于船舶适应性模型,其中包括船舶动态特性的流体力学描述,并能够估计位置和航向参数。考虑到阻力和附加质量系数的不同特征,该模型描述了船舶运动和船舶对作用在船体上的力和力矩的响应。设计的船型在海上试验期间进行调整,
从而最大限度地减少模型偏离真实船舶的行为。图。 5. DP控制系统DP系统使用的测量仪器不会因风,波浪和海流的作用而直接测量作用在船体上的力和力矩的机会。在该系统中,借助于扩展的离散卡尔曼滤波器进行的信号滤波使得能够以三自由度即横向和横向估计船舶在水平运动中的位置,速度和航向,以及在实际过程中偏离的方向,基于船舶的适应性模型。以考虑到风向和速度(DP系统中不测量波浪起伏和海流),螺旋桨叶片的旋转速度,偏转角度和在船上运行的推进器的旋转角度等可测量的数量,可以建模和引入信号 对船体行事。风力模型给出了风力产生的力量,考虑到变化的系数作为测量的风速和方向的函数。螺旋桨和推进器的模型基于测量的转速,螺旋桨叶片的偏转角度和转数(来自螺旋桨和推进器的反馈)的变化特征,提供了作用在船体上的推力的力和方向。 DP系统的操作方案,如图1所示。 5,说明基本任务包括:信号过滤和测量和非测量数量的估计,控制方法和DOP控制器的选择以及方向舵和螺旋桨的分配。由于不是可以测量所有参数的所有值,所以应该从描述估计值和测量值x(t)之间的关系的数学模型估计缺失值。测量信号和状态估计的过滤是DP系统的重要组成部分。在船的纵向和横向速度较低的情况下执行动态定位,因此不可能直接测量这些数量。它们可以根据国家测量的船舶位置和方向的值估算
观察者。船舶位置和方向测量受到风,波浪和海流的影响以及所使用的测量仪器的噪音的干扰。所有这些扰动都具有低频(LF)干扰的形式,并对其施加波频(WF)干扰。振荡WF干扰将被滤除,使得它们不构成输入信号的一部分到闭合位置和方向控制系统。同时,与设定位置和过程相关的偏转相关的滤波低频干扰将由推进/推进器系统补偿。上述任务使用测量位置和方向信号的波滤波(LF和WF)进行,并进一步进行状态估计。在DP系统中,使用扩展卡尔曼滤波器进行波滤波和状态估计。这种方法的一个基本缺点是运动学运动学方程被线性化以表征方向[3,10]的一组固定角度。在导航系统中由仪器测量的位置和方向信号被收集在DP系统中,并与从模型获得的值进行比较。如果观察到某些差异,则使用实际值更新模型。调整船舶模型是一个适应过程,随着调整的进行,基于从安装在船上的传感器获得的实际测量结果,模型不确定性随着学习的结果而降低。扩展卡尔曼滤波器能够:(1)在测量位置和航向信号中波频干扰的最佳和自适应滤波,以及(2)从不同位置估计系统获得的测量的最优融合。在后一种情况下,为每个计算方差
位置测量系统和该测量的重量被确定(所谓的多传感器融合)[11]。位置测量的融合提供了处理由不同测量源测量的量的机会,以获得新的和更完整的测量数据,这些测量数据无法从一个来源获得。如果某些位置测量结果丢失,则系统能够从先前评估的位置计算位置。这意味着系统可以在没有测量更新的情况下计算近似位置。
III。最终结论
本文概述了船舶动态定位系统的基本功能和任务,掌握了控制结构。 DP系统执行的任务包括稳定船舶的地理位置和方向(实际路线)。所讨论的问题涉及以低速进行的DP船的控制和模型,以及关于这种类型的船舶的船级社的要求。详细分析了DP船舶控制系统结构的特定层的功能。控制DP船舶最重要的问题包括:选择控制算法和方法,信号
测量量的过滤和估计,以及驱动器分配的优化。
REFERENCES
[1] Dynamic Positioning Systems. Norway : Det Norskie Veritas AS, 2011.
[2] Fossen T. I., Guidance and Control of Ocean Vehicles. Chichester : John
Wiley amp; Sons Ltd., 1994.
[3] Fossen T. I., Marine Control Systems: Guidance, Navigation and
Control of Ships, Rigs and Underwater Vehicles. Trondheim : Marine
Cybernetics AS, 2002.
[4] Golding B. K., Industrial Systems for Guidance and Control of Marine
Surface Vessels. Trondheim, Norway : Norwegian University of Science
and Technology, Department of Engineering Cybernetics, 2004.
[5] Holvik J. 1998. Basics of Dynamic Positioning. Hiuston : Dynamic
Positioning Conference, 1998.
[6] International Marine Contractors Association. 2007. Guidelines for The
Design and Operation of Dynamically Positioned Vessels. Londyn :
International Marine Contractors Association, 2007.
[7] International Maritime Organization. 1994. Guidelines for Vessels with
Dynamic Positioning Systems, IMO MSC Circular 645. London : IMO,
1994.
[8] Marine Technology Society. DP Vessel Design Philosophy Part 1 i 2.
Houston, Dynamic Positioning Committee , 2011.
[9] Rowley U.H. 2002. DP Integration and Technology Growth on
Workboats. Dynamic Positio
全文共6139字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144526],资料为PDF文档或Word文档,PDF文档可免费转换为Word



