混合动力太阳能汽车的优化设计与动态仿真外文翻译资料
2021-12-22 22:41:06
混合动力太阳能汽车的优化设计与动态仿真
Ivan Arsie, Gianfranco Rizzo and Marco Sorrentino
意大利萨勒诺大学机械工程系
摘要:
本文在考虑能量流、重量和成本的基础上,基于纵向车辆动力学模型,对太阳能混合动力汽车的最佳尺寸进行了详细的研究。该模型描述了太阳能电池板面积和位置、车辆尺寸和动力装置部件对车辆性能、重量、燃油节约和成本的影响。结果表明,考虑到成本和价格的预期趋势,在平均功率有限的情况下,间歇使用可实现显著的燃油节约,在未来可实现经济可行性。
介绍:
近年来,人们越来越关注太阳能在汽车上的应用。各种太阳能汽车原型已经建造和测试,主要目的用于赛车和演示[1] [2]。
尽管有重大的技术努力和一些惊人的成果,但一些限制,如低功率密度、不可预测的太阳能资源可用性和能源缺陷(即由于附加部件而增加的重量、摩擦和空气动力损失),使得纯太阳能汽车仍远不具备实际可行性。另一方面,太阳能电池板辅助的混合动力汽车的概念看起来更为现实[3][4][5][6][7]。事实上,由于相关的研究工作[8],在过去的几十年中,混合动力电动汽车(HEV)工业发展已经十分成熟。这些车辆现在代表了对重要问题的现实解决方案,例如减少城市行驶中的气体污染以及节能要求。此外,有大量的司机每天都在使用他们的汽车进行着短途旅行和有限的电力需求。英国政府最近进行的一些研究报告表明,约71%的英国用户通过汽车到达办公室,46%的人的出行时间短于20分钟而大多数只有一名乘客(即司机)[9]。上述考虑为太阳能电池板与“纯”电动混合动力汽车(即“三混合动力”汽车)的集成提供了广阔的前景,甚至对在停车阶段存储能量的机会也特别感兴趣。
尽管他们有潜在的兴趣,但是太阳能混合动力汽车在文献中的关注相对较少[7]。90年代,西华盛顿大学(Western Washington University)开发了一个新的原型,采用了先进的材料来解决空气动力减阻和峰值功率跟踪的光伏功率最大化的方案。日本研究人员[3][4]和昆士兰大学[10]也提出了太阳能混合动力汽车的其他研究和原型。
尽管这些工作证明了这一想法的一般可行性,但在文献中,对结果和性能的详细介绍以及对太阳能混合动力汽车设计的系统方法似乎仍然缺失。因此,需要适当的方法来解决技术方案的快速变化和创新、更高效的组件和日益增长的解决方案的可用性问题。开发混合太阳能汽车(HSV)模型的一个特殊困难涉及到能量流、发电厂动力传动系的平衡和尺寸、车辆尺寸、性能、重量和成本之间的许多相互作用,这些相互作用比传统或混合动力汽车的连接更为关键。作者最近对高铁车辆中的能量流进行了初步研究[11][12]。本文对太阳能混合动力汽车的最佳尺寸进行了较为详细的研究。优化分析基于纵向车辆动力学模型,该模型不仅考虑了重量和成本的影响,还考虑了能量流的影响以及所采用的控制策略。
太阳能混合动力汽车的结构:
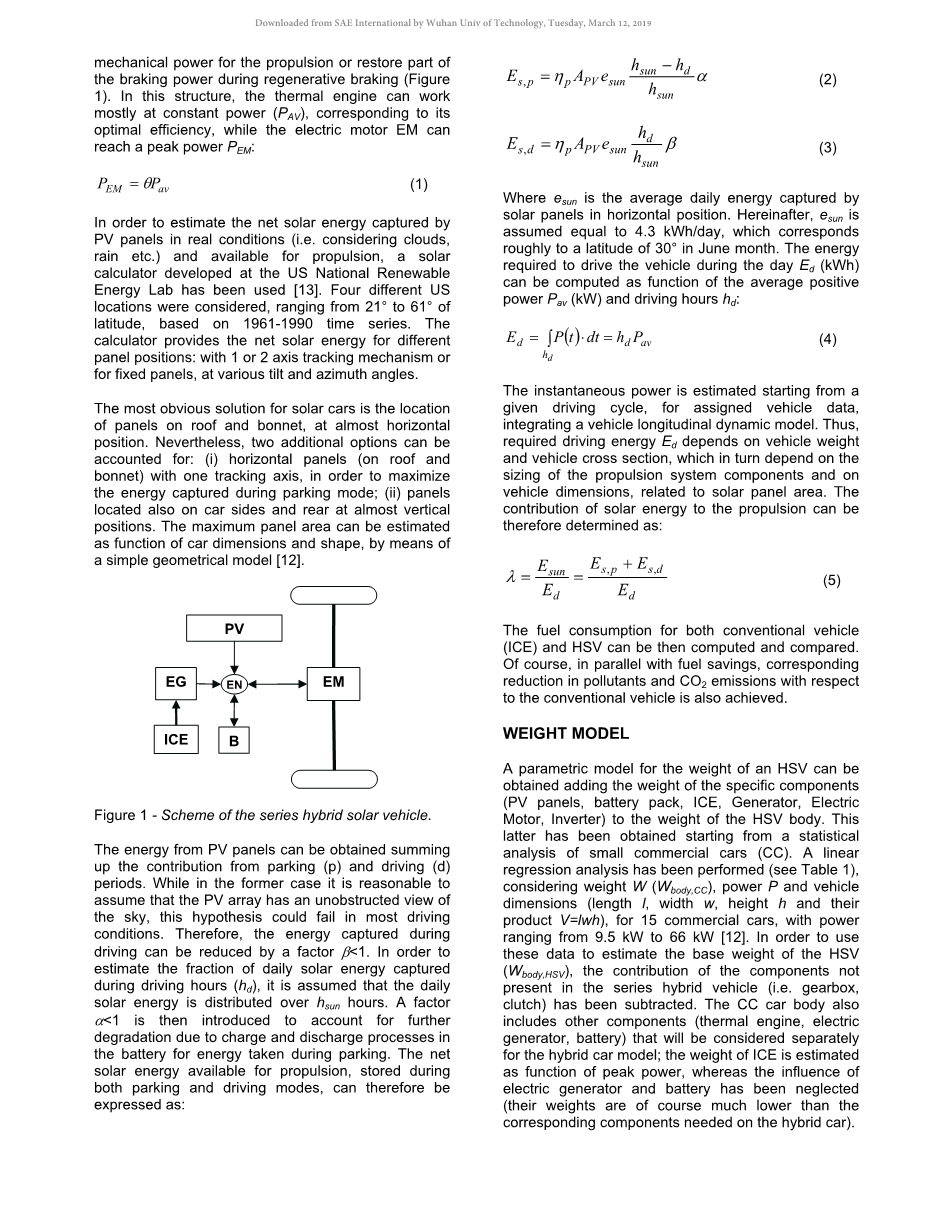
不同的体系结构可以应用于HEV:串联、并联和并联。后两种结构已用于市场上两种更广泛使用的混合动力汽车:丰田普锐斯(平行系列)和本田思域(平行系列)。相反,对于太阳能混合动力汽车来说,系列结构似乎更可取[7],因为它很简单,就像最近的一些HSV原型[10]一样。通过这种方法,光伏电池板(PV)帮助由冰驱动的发电机,例如,通过电气节点EN,在停车模式和驾驶条件下为电池组B充电。电动机EM可以提供再生制动过程中推进或恢复部分制动功率的机械功率(图1)。在这种结构中,热机主要在恒功率(PAV)下工作,与其最佳效率相对应,而电动机EM可以达到峰值功率PEM。
PEM=theta;Pav
为了估算光伏电池板在真实条件下(即考虑云、雨等)捕获并可用于推进的净太阳能,使用了美国国家可再生能源实验室开发的太阳能计算器[13]。根据1961-1990年的时间序列,我们考虑了四个不同的美国地点,纬度在21°到61°之间。计算器提供不同面板位置的净太阳能:1或2轴跟踪机构或固定面板,在不同的倾斜和方位角。
太阳能汽车最明显的解决方案是将车顶和发动机罩上的面板置于几乎水平的位置。然而,可以考虑两个附加选项:(i)带有一个跟踪轴的水平面板(在车顶和发动机罩上),以最大限度地提高驻车模式期间捕获的能量;(i i)也位于车辆侧面和后部几乎垂直位置的面板。通过一个简单的几何模型[12],最大面板面积可根据汽车尺寸和形状进行估算。
图1-串联混合太阳能汽车的方案
从光伏电池板获得的能量可以得出停车(P)和驾驶(D)阶段获得的能量。在前一种情况下,如果光伏阵列具有无障碍的天空视野是合理的假设,但这种假设在大多数驾驶条件下都可能失败。因此,行驶过程中捕获的能量可以减少系数elt;1。为了估计在行驶时间(hd)捕获的每日太阳能的比例,假设每日太阳能分布在hsun小时。然后引入系数dlt;1,以考虑由于蓄电池充电和放电过程而导致的进一步退化,从而获得驻车期间的能量。因此,在停车和驾驶模式期间,可用于推进的净太阳能可表示为:
其中,esun是太阳电池板在水平位置捕获的平均日能量。在下文中,假设esun等于4.3 kWh/天,大致相当于6月时处于纬度30°。白天行驶车辆所需的能量(kWh)可根据平均正功率pav(kw)和行驶小时hd计算得出:
从给定的行驶循环开始,结合车辆纵向动力学模型,对指定的车辆数据估计瞬时功率。因此,所需的驱动能量E d取决于车辆重量和车辆横截面,进而取决于推进系统部件的尺寸以及与太阳能电池板面积相关的车辆尺寸。因此,太阳能对推进力的贡献可确定为:
然后可以计算和与传统车辆(ICE)和HSV相比较的燃油消耗量。当然,在节省燃油的同时,也相应地减少了传统车辆的污染物和二氧化碳排放。
权重模型
将特定组件(光伏板、电池组、ICE、发电机、电动机、逆变器)的重量与HSV主体的重量相加,即可得到HSV重量的参数模型。后者是从小型商用车(CC)的统计分析中得出的。对15辆商用车进行了线性回归分析(见表1),考虑了重量W(Wbody,cc)、功率p和车辆尺寸(长度l、宽度w、高度h及其产品V=lwh),功率范围为9.5千瓦至66千瓦[12]。为了使用这些数据来估计HSV(Wbody,HSV)的基本重量,已减去串联混合动力车辆(即变速箱、离合器)中不存在的部件的重量。CC的车身还包括混合动力车型将单独考虑的其他部件(热机、发电机、蓄电池);ICE的重量估计为峰值功率的函数,而忽略了发电机和蓄电池的影响(在混合动力汽车所需的部件中它们的重量当然比相应的重量低得多)。
表1——商用车车身质量回归分析。
因此,HSV的车体(即Wbody、hsv)和整个(Whsv)质量可以表示为:
平衡HSV最大功率所需的模块数量估计公式如下:
其中Pb,u是单个电池模块的额定功率。假设功率重量比(ptwhsv)不变,计算电机功率(Pem),相当于由75 kW汽油发动机驱动的1250 kg传统汽车(cc):
成本估算
为了评估HSV对传统车辆的好处,需要估计混合动力和太阳能电池板带来的额外成本,以及可实现的燃油节约。附加成本CHSV可以从每个部件的估计单位成本开始表示:
最后一个术语解释了相对于传统车辆(其中PICE=PICE,CC),HSV中内燃机的成本降低(假设PICE=PEG/K EG)。
传统车辆的日节油量可从节油量和燃油单位成本开始计算:
因此,根据传统车辆获取额外成本所需的年数,可估算为:
有关eqs中引入的一些参数的含义和值的更多详细信息。从2到13,读者可以读到以前的作品[12]。
车辆动力学模型
在之前的一篇论文[12]中,我们进行了扩展优化分析,从面板面积、车辆尺寸和重量方面研究了纬度、成本、价格和布局对最优车辆结构的影响。通过采用简化方法计算与传统车辆相比的HSV燃油节省量,得出了所述结果,假设两种情况下的燃油消耗平均值和平均年太阳能数据。虽然该方法足以评估高速车辆的一般可行性,并了解主要变量对成本和节能的影响,但不能准确评估车辆重量和尺寸对行驶循环中惯性力和空气动力的影响。此外,还需要更精确的分析来分析控制策略对能量流的影响,同时考虑季节性对太阳能的影响。为了克服这些限制,基于作者开发的动态车辆模拟器,开发了一个纵向车辆模型来模拟HSV和常规车辆在行驶循环中的动态行为[15]。Advisor模型[16]模拟了电池、电动机和发电机。
HSV发动机控制
在大多数混合动力电动汽车中,采用了持续充电的策略:在行驶路径的末端,电池的充电状态应保持不变。对于太阳能混合动力汽车,应采取不同的策略,因为电池也可以在停车时间充电。在这种情况下,可以追求一个不同的目标,即在一天结束时恢复初始充电状态,而不是在一条行驶路径之后。为此,内燃机应尽可能以最大效率运行,与功率Popt相对应。如果恢复电池充电所需的能量低于在整个行驶时间hd(情况B)内持续使用Popt所需的能量,则可以采用间歇操作(情况A1-A2)。如果需要更多的能量,内燃机将在Popt和Pmax(案例C)之间以恒定功率运行。不同的操作模式可以用变量ф来描述,从0到фmax=Pmax/Popt,如表2所述。
最佳ф值是通过假设在行驶时间内由ICE和光伏电池板提供的保证全天的电荷维持量的能量策略得出。这种情况的公式为:
表2–高速车辆的发动机控制策略
假设持续时间为hd小时的驾驶计划由一系列ECE-EUDC循环组成,通过在一个循环内迭代求解以下非线性方程,可以满足等式(14):
其中,Ncycles被评估为每个模块持续时间Tcycle(h)的函数:
图2至图4显示了选定HSV配置的模型输出,在ECE-EUDC驾驶循环中进行模拟,并根据表2中定义的策略进行控制。
图2——ECE-EUDC循环的功率贡献(APV,H=3 m2,Peg=35.5 kw,L=4.2 m,W=1.75 m,H=1.5 m)。
由于在选定的情况下,最优I值小于1,因此热机可以间歇地以与最高效率相对应的恒定负荷和速度运行,如图2(黑线)所示。根据所实施的控制策略,发动机在行驶循环的后半部分工作,当驱动车辆所需的功率达到其最高值(蓝线);这样发动机动力供应至动力传动系,而不储存在蓄电池中,从而最大限度地减少峰值功率时间窗口(1050–1150 s)中的充放电损耗。另一方面,在瞬态的前一部分中,驱动电源完全由经历充电状态(SOC)降低的电池(红线)提供,如图3所示。这一趋势在700秒左右发生了逆转,当发动机启动时,由于低功率需求,主要用于给电池充电至800秒(见图3)。随后,发动机与蓄电池同时为车辆提供动力,导致瞬态(1050–1150 s)后期的荷电状态急剧下降,此时蓄电池被要求提供大部分驱动电源。
图3-电池充电状态(APV,H=3 m2,PEG=35.5 kW,L=4.2 m,W=1.75 m,H=1.5 m)。
首先出现的是放电过程,随后是充电过程,这将进一步有利于电池损耗,因为SOC越低,充电阶段越有效。由于等式(15)引入的约束,最终SOC与初始值之间的差异是停车时间内存储能量的一小部分。
图4——ECE-EUDC循环期间CC和HSV转速的比较(APV,H=3 m2,PEG=35.5 kw,L=4.2 m,W=1.75 m,H=1.5 m)。
图4显示了混合动力车辆和传统车辆的发动机转速比较,证明了在后一种情况下(实线),ICE在大多数情况下处于部分负载工作时比油耗值更高。
这里值得一提的是,还有其他的一些策略是可有能的,例如让ICE在停车模式下运行:在这种情况下,发动机可以通过始终以其最大工作效率来恢复电池的电量。
参数分析
为了评估HSV配置对传统车辆的能量效益,进行了参数分析,从发电机(EG)功率为10-60kw,光伏面积为0(与纯混合动力电动汽车相对应)到6.5平方米。通过施加恒定的总最大功率(即PEM)与车辆重量比来进行分析;因此,通过增加电池模块来补偿EG功率的降低,从而导致重量增加,最终获得更大的总功率。在此分析中,车辆尺寸一直保持与参考车辆尺寸相同(L=4.2 m;W=1.75 m;H=1.5 m)。
分析的目的是比较传统与混合动力太阳能汽车的燃油消耗量,并处于行驶小时数hd=2相对应的时间范围。图5显示了车辆质量与EG功率的预期趋势:随着EG功率的增加,维持施加的最大功率所需的电池模块数量减少。这种行为导致车辆重量较轻,因为特定的EG功率(kw/kg)大于特定的电池功率。此外,该图显示,引入面板导致质量的拟线性状态增加。
控制变量ф对EG功率的依赖关系如图6所示:根据所采用的控制策略,随着功率的增加,EG在较短的时间内提供所需的能量,从而缩短了运行时间。尤其

英语原文共 7 页
资料编号:[3883]



