虚拟操作级液压舵机建模毕业论文
2020-04-09 15:23:27
摘 要
近几年计算机新媒体越来越广泛应用于学术领域。主要是在教学中让学生对事物有一个更加形象地理解和认识,使枯燥无味的教学变得生动、有趣的视频和图片。对于当代学生来说,学习的都是一些理论知识,没有实物对他们来说是不小的挑战,但是在教学中辅以网络教学、新媒体教学、计算机动画就有效地提高了学生们对一些相关知识的更加深入的认知,吸收起来比较容易,有效地提高了老师的教学效率和学生们的学习效率。本文主要是借助3DMAX软件对辅机实验室液压舵机进行模拟,对液压舵机有一个更加深入地认识的同时达到研究的目的。论文对液压舵机进行了比较深入的研究,完成了如下的工作:
(1)运用辅机液压舵机以及工程图学的相关知识,在测量数据以及假设的基础上,进行相应的计算,对辅机实验室液压舵机建立数学模型。得到液压舵机各个部分的数据,方便后面的建模。
(2)对3DMAX软件进行深入的学习,建立一些简单的模型,慢慢的了解深入。最后对液压舵机进行建模。
关键词:液压舵机;3DMAX;数学建模
Abstract
In recent years, new computer media has become more and more widely used in academic fields. Mainly in the teaching to allow students to have a more image of the understanding and understanding of things, so boring teaching becomes vivid and interesting videos and pictures. For contemporary students, learning is a bit of theoretical knowledge. There is no physical object that is not a challenge for them. However, the use of network teaching, new media teaching,and computer animation in teaching has effectively improved students' The more in-depth knowledge of relevant knowledge, it is easier to absorb, effectively improving the teacher's teaching efficiency and students' learning efficiency.This article mainly uses the 3DMAX software to simulate the hydraulic servo of the auxiliary engine laboratory. It has a deeper understanding of the hydraulic servo and achieves the purpose of research at the same time.This article mainly uses the 3DMAX software to simulate the hydraulic servo of the auxiliary engine laboratory. It has a deeper understanding of the hydraulic servo and achieves the purpose of research at the same time.The paper conducted a relatively in-depth study of the hydraulic steering gear and completed the following work:
(1) Based on the related knowledge of the auxiliary hydraulic steering gear and engineering drawings, based on the measurement data and assumptions, the corresponding calculations were carried out to establish a mathematical model for the auxiliary hydraulic steering engine. Get the data of each part of the hydraulic servo to facilitate the later modeling.
(2) In-depth study of 3DMAX software, the establishment of some simple models, and slowly understand the depth. Finally, the hydraulic servo is modeled.
Key Words:Hydraulic steering gear;3DMAX;Mathematical modeling
目录
第1章 绪论 1
1.1研究课题的目的及意义 1
1.2国内外的研究现状分析 1
1.3基本内容 2
1.3.1研究内容 2
1.3.2技术方案 3
1.4 本章小结 3
第2章 舵机概述 4
2.1 舵机设备组成和舵的类型 4
2.2 舵的作用原理 4
2.2.1舵的水动力及对船舶运动的影响 5
2.2.2 转船力矩 5
2.2.3 转舵扭矩 6
2.2.4 船舶液压舵机工作原理 6
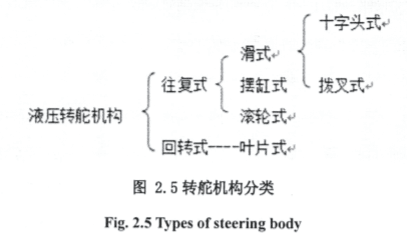
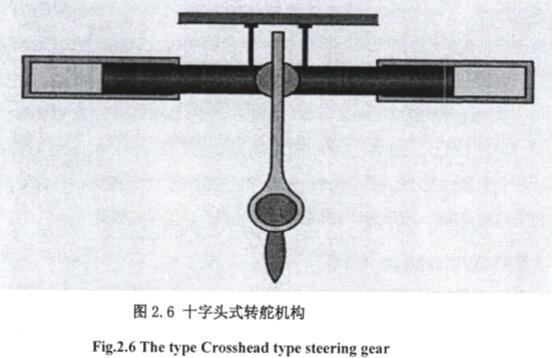
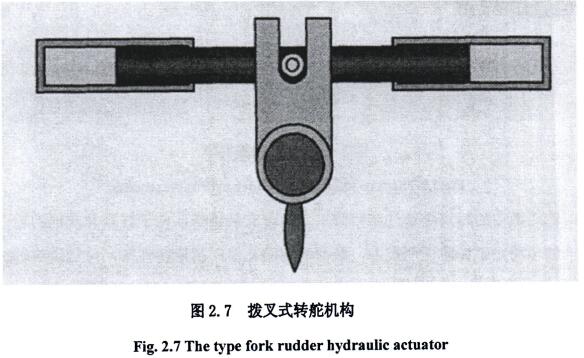
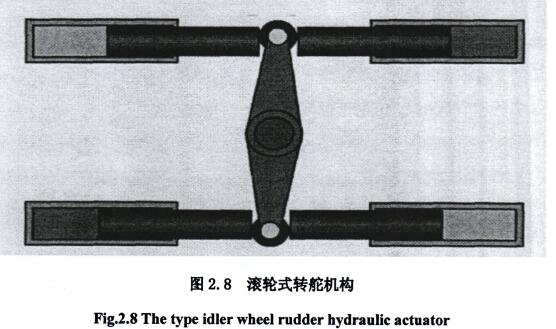
2.2.5 液压舵机转舵机构简介 7
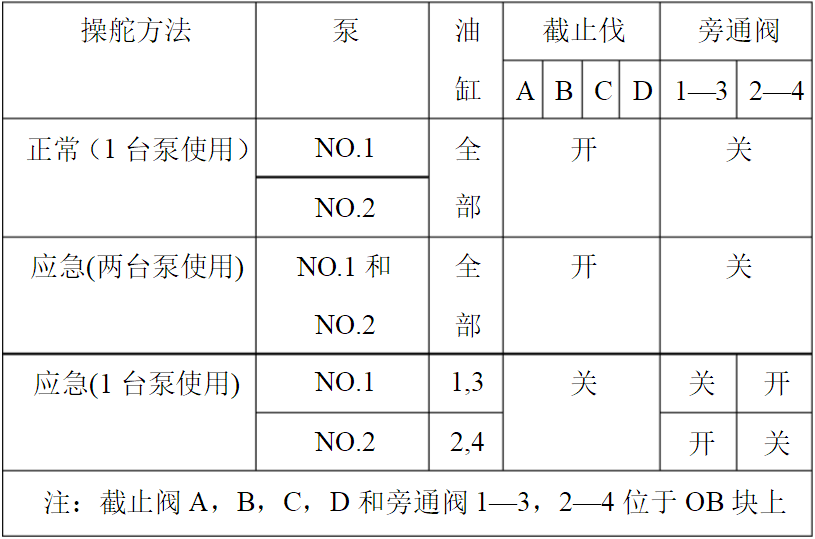
2.2.6舵机应急操作 9
2.3 本章小结 10
第3章 建模工具介绍 11
3.1 版本介绍 11
3.2 3DS MAX2015界面 12
3.2.1 开启3DS Max的基本方法 12
3.2.2 3DS MAX设计所需环境 12
3.2.3 启动3DS MAX 12
3.2.4了解界面各区域功能简介 12
3.3 本章小结 12
第4章 液压舵机模型建立过程展示 13
4.1 建模前期 13
4.2 建模中期 13
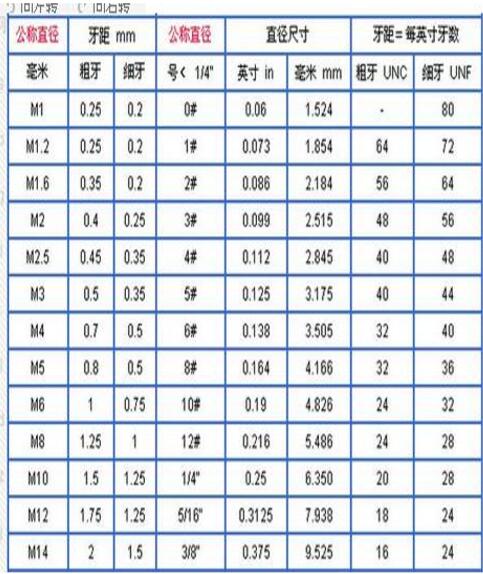
4.2.1 螺栓 13
4.2.2 油位计 16
4.2.3 压力表 16
4.2.4 管路弯曲连接处 18
4.2.5 阀 18
4.3建模后期 21
4.4 本章小结 22
第5章结论和展望 23
5.1 结论 23
5.2 展望 23
参考文献 24
致 谢 25
第1章 绪论
1.1研究课题的目的及意义
由于全球经济化和世界区域一体化的影响,全球的航运界运输量需求的不断增加。海运在世界上被广泛应用,这造成船舶增加,同时,随着船舶推动动力的变化,船舶自动化的成长,航速不断的提升等等特色,这些都在使得船舶发展变得更加迅速,因此我们需要更加成熟的技术。
船舶要能正常的航行,除应当具备良好的推动机能外,还需要有优良的操作技能。操舵系统有液压舵机和主动操纵仪。其中舵机自电动舵机发展到液压舵机,由小型阀控型舵机发展到现在泵控舵机,装备变得更加的庞大。主动操舵仪的功效不断的增加,控制算法也在不断的更新。若是操舵系统内各装备存在妨碍工作的装置,或者是装备之间的匹配存在问题,轻则使得船舶操舵系统不稳定、机动性差,重则致使船舶失控,不但在经济上会造成庞大的丧失,还会对环境造成的污染。
实践证明,船舶事故中,80%以上的事故都是人为因素引起的,因此提升船员的综合素质,增强轮机管理人员专业培训,强化轮机技能的训练等是减少事故发生的最有效的措施,而液压舵机系统的建模与仿真研究可以作为智能化考试系统和轮机模拟器的重要组成部分,为船员实操提供一个逼真形象的操作环境,同时也可用于舵机的性能预测和故障判断,对提高船员综合素质有着重要的意义[1]。
本文操纵3D MAX对舵机系统建模有利于提早发现液压舵机系统中存在的问题,进一步提高操舵系统的安全性和可靠性!
3D MAX 是 Auto-desk 公司下的一款 3 维动画软件。在 3 维的高档建模中主要有 4 种,多边形建模、面片建模、网格建模、NURBS 建模。3D MAX 建模软件的利用很是普遍,具备可操作性强、功能强大、模型形象传神、质感强等特点,但是其在建模过程中数据量很大[2]。
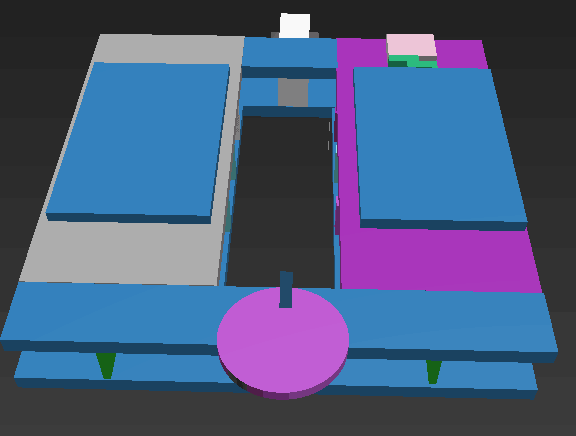
本文设计的液压舵机模拟系统主要是利用3DMAX建模来使液压舵机形象化,达到更深一步了解液压舵机系统和方便以后研究的目的。
1.2国内外的研究现状分析
舵是船舶安全航行的三大基本要件之一,它的诞生具有重要的意义 [14]。
舵是用来控制船舶航向的设备,舵机对船舶控制具有不可替代的作用,所以从船舶诞生的那天起就产生了最原始的舵,只不过最初的舵只是一个船尾舵桨[3]。为了增强对船舶的控制作用,尾舵桨的面积得以增大,逐渐演化出了与现代类似的舵。从蒸汽机发明取代了人力驱动的舵机,到后来的电动舵机和电动液压成为主流,其中,电动液压舵机不仅具有电动舵机响应快的特点,而且输出功率大,是目前应用最广泛的舵机[4]。电动液压舵机按照传统转舵机构的不同又可以分为往复式和转叶式两种。其中往复式舵机包含滑动式、滚轮式、摆缸式三种形式[5]。
贯通近代中国海洋经济整体发展的断代史和专史研究领域,诸多问题或未能涉猎,或缺乏系统的考据论证,许多新材料、新问题未能深入研究,还需要进一步突破[6]。但在当代,国内的一些研究值得我们关注,一些方面发展的很迅速。例如与液压传动相关的技术也一直在飞速发展,许多新型液压元件不断更新,如逻辑阀、比例调节阀等[7],这些液压元件的广泛利用和一些响应的钻研也不竭的鞭策着液压舵机系统的成长前进,比方:邓琦,邓攀等成立的一种新型船舶系统建模与控制钻研,推导了液压舵各个部分的传递函数,利用Multi-skilling软件对液压系统进行了建模与仿真剖析。他们所采用的PID控制参数设计提高了系统的响应与及信号的跟踪性能,对实际系统地设计很有帮助[8]。李彦波,熊宽等,针对采取通例的控制方式液压舵机系统响应速度慢、抗干扰能力差等问题,按照控制理论成立了液压舵机伺服系统的数学模型,对液压舵机系统举行仿真来到达进步液压舵机系统的快速性和抗干扰性钻研的目的。对船用液压舵机故障模拟平台的建设目的进行详细的阐述,并简要介绍了故障模拟平台的设计要求、基本结构和工作原理[9]。李琳,吴进等经由过程对船用液压舵机故障模拟尝试平台的研制,经由长期尝试验证,达到液压舵机尝试钻研和讲授演示要求。为学校教学、科研提供了一种新的实验手段[10]。徐超,刘刚等人基于泵控液压舵机的潜艇深度及纵倾控制计划的垂直面上纵倾和深度模型,联系液压系统模型与非线性控制算法的钻研论证了该系统在潜艇垂直面活动控制上的可靠性。与此同时,对液压舵机滞后、振荡性进行的仿真及试验分析,也表明系统可有效降低滑模变结构控制带来的抖振问题[11]。Henge Shantung发明了一种基于3DMAX脚本技术进行模型映射优化的方法。脚本处理代替了原来繁重的手工操作,节省了手工成本,简化了执行方案,提高了模型制作效率,映射优化得到了极大的改善,模型的碎片UV被调整为更适当的大小的地图,并且资源浪费减少[12]。国外的Gunner Schmidt 和Bait Barf基于Java的智能编程环境Cocktail作为工具,用图形方式描述系统的多极模型,并以用户喜欢的方式执行模拟。设计人员不需要专注于编程,而是可以将模型与生成的代码一起使用[13]。典型的实时混合仿真(RTHS)设置中,伺服液压执行器用作计算和物理子结构之间的接口。制动器动力学引发的时间延迟和制动器与试样之间的庞大相互作用对RTHS的稳定性和准确性有不好影响,Maghreb, A min和 Dyke, Shirley J.从加载到目标执行器的各种试件质量和刚度组合收集的实验数据通过遗传算法获得,明显改善RTHS性能的识别系统参数的控制器,而且建立伺服液压系统的分析和计算仿真,帮助研究人员解释系统不稳定性并改进实验设计[15]。
1.3基本内容
1.3.1研究内容
1.学习3DSMAX工具软件,了解其特点,掌握基本的三维建模方法;
2.熟悉液压舵机的基本工作原理;
3.基于所学的专业知识,对液压舵机系统进行建模,包括:液压油泵、油箱、液压油缸、阀件、管路等,并进行纹理和材质的处理;部分阀件和转舵装置要求可操作;
1.3.2技术方案
在数据收集过程中,应根据建设过程对于舵机、液压泵等部分的要求不同, 选
择不同分辨率和精确度的数据和图片。在原始资料取得后,将单个物体的轮廓线从摄入照片中提取,作为建筑模型的底图资料而且依照一定的比例把图片做成地形贴图。测量出舵机各个部分的尺寸。
3D MAX 在虚拟现实建模中的关键问题:
(1)基本建模方面。固然经由3D MAX能实现模型精细,效果美好的模型,但是全部过程的数据量是惊人的,此外3DMAX存在于其他软件连接不方便的问题,有鉴于此,为达到二者兼容,3D MAX 建模中应尽可能利用简略写法。为保证数据的准确性,模型在不影响全部舵机系统质量的前提下应尽量简略。
(2)数据整理方面。在模型中,纹理是影响数据量的重要因素。纹理的形状直接关系到文件的渲染速率和全部数据量长度。因而,在处理液压舵机部件时,应将纹理尺寸(在不影响模型表面的前提下)调到尽量小,同时要现场测量相关的实际数据。
1.4 本章小结
本章节主要是介绍了液压舵机在国内外的发展现状以及一些建模相关的研究成果展示,包括液压舵机建模过程的技术方案。液压舵机的建模对于现代教学领域有很大的现实意义,能够加深学生对于事物的学习和认知,同时能够提高教学效率和学生们的学习效率。
第二章 舵机概述
2.1 舵机设备组成和舵的类型
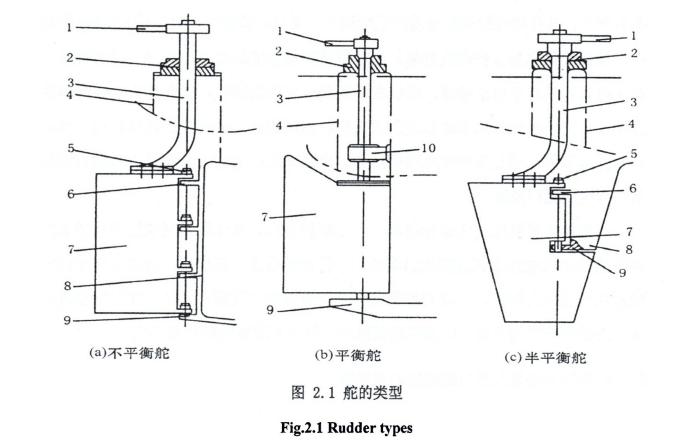
图2.1舵的类型
1舵柄2上舵承3舵杆4舵杆套筒5舵销6舵钮7舵叶8舵柱9舵托10 舵承
不平衡舵--舵杆轴线靠近舵叶导边(舵叶前缘)的舵; .
平衡舵--舵杆轴线置于舵叶导边后面一定距离的舵;
半平衡舵--下半部分做成平衡式舵。
当平衡转向和部分平衡转向不同时,那么水流对方向盘轴前后叶片前后的冲击是相反的,这样可以减少所需的转向扭矩。
水流在舵叶的前叶片表面和后叶片表面上的作用力被反转,可以减小转向扭矩。
2.2 舵的作用原理
船舶舵机的分类方式有很多,按照驱动动力可分为电动液压舵机、蒸汽舵机、
电动舵机等;依照舵灯信号分类可分为模拟舵机与数字舵机。在各类舵机中,电动液压舵机具备重量轻、故障率低、反映迅速、机器尺寸小的特色,在各类工况
工作安全且可靠,即使在暴风雨天的时候,也可以低噪音进行操作,并且可以有效缓冲风浪对舵叶的冲击,起到保护舵叶,延长舵叶使用寿命的作用,此外还可以实现无级变速,单元能耗小,运营成本低,有用功率的规模广。基于电动液压舵机有很多的优点,其在当代船舶中有着广泛应用。文章在阐述时,以川崎FE一400型泵控型液压舵机作为分析研究工具。大多数液压转向齿轮泵通过由外部电机操作而运行。由于液压油具有不可压缩性,所以舵机利用液压油的特性,并将液压油作为能量的传播介质,首先将机械能转换为液压油的压力能量,然后油将压力能传递给转向机构,然后转换成机械能并且可以通过液压的压力实现能量的转换,改变循环油量流动方向。就可以实现对船舶舵机系统的远程操控。
船用液压转向机由三部分组成:第一部分是转向机构,将液压油的液压能转化为机械能,实现舵叶的挠曲,第二部分是液压系统,由液压系统提供液压能油泵转换,转向系统也可配备所有转向系统的保护装置,第三部分是转向系统的控制系统,通过得到操作系统通报舵的指示,实现舵的精确操作。
2.2.1舵的水动力及对船舶运动的影响
舵角α:舵叶横截面直径与船舶垂直线之间的夹角,当舵(α= 0°)时,水流动力作用在舵叶的两侧。
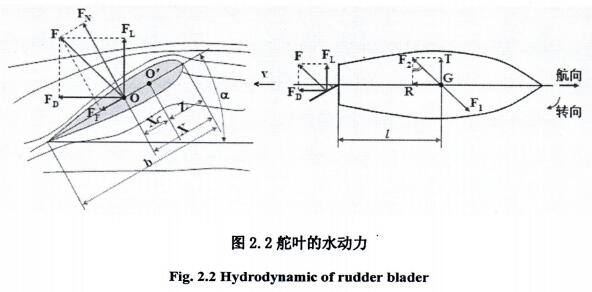
图2.2舵叶的水动力
FN:转向压力(液压耦合力),F:流体力,R≈F1=sin:阻力,;
0:转向压力中心FL=顺时针转矩;FF =摩擦力,FF≤FN;
T≈F1cosα:漂移; F与重心G不在同一水平面:纵倾,横倾;
2.2.2 转船力矩

- 船舶重心G到舵杆轴线的距离,m;
Xc-舵压力中间O至舵杆轴线的间隔,正航时Xc=X-Z,Z是舵杆轴线至舵叶导边的间隔;
CL-舵的升力系数;ρ-水的密度,kg/m³。
- 舵叶的单侧浸水面积,㎡;
V舵叶片的水速m/s为航行速度的1.15至1.2倍。
拧紧扭矩与舵叶的水下部分和水速的平方成正比,对水速没有搅拌作用。
舵角α在一定范围内增加时,舵叶的升力系数CL增大,翻转力矩M也增加,在舵角一定时,转舵的转矩给出最大值,之后舵角继续减少。转船力矩会呈现最大值是舵角称之为最大舵角αmax,海船αmax=35°,内河船αmax=35°-45°;
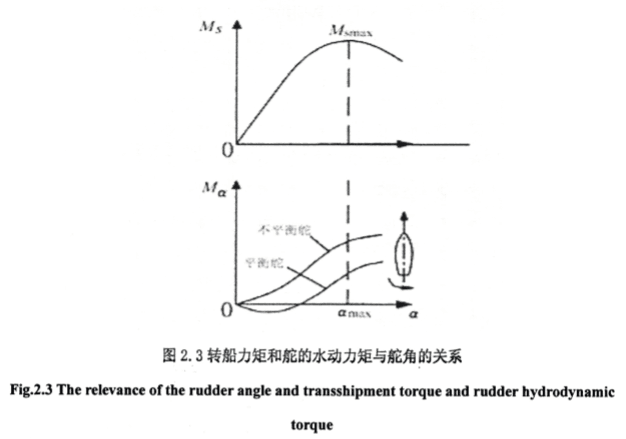
图2.3转舵力矩和舵的水动力矩与舵角的关系
2.2.3 转舵扭矩
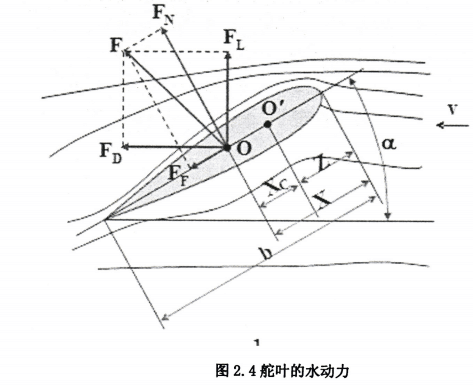
图2.4舵叶的水动力

舵叶水动力F相对舵杆轴线的力矩称为舵的水动力矩Ma。
舵机工作时施加于舵杆的扭矩称为转舵扭矩M。
M=Ma M1
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: