使用硬装载主动隔振的两个传感器控制外文翻译资料
2022-10-31 14:32:07

英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
使用硬装载主动隔振的两个传感器控制
Michiel A. Beijen a,n, Dirk Tjepkema b, Johannes van Dijk a
(特文特大学机械部自动化、 机电一体化,荷兰,恩斯赫德,NL 7500 AE)
摘要:在隔离精密机器和地面振动时,通常采用主动隔振。在本文中,基于加速度和力反馈,两个传感器控制策略被针对于使用单轴式活跃硬装载的主动隔振。硬装载提供了有力的支持。一个主动控制系统用来获得所需的隔离性能。在我们以前的工作中,我们展示活动硬装载传感器融合控制策略可以用于同时实现三个性能目标︰隔离地面振动, 实现直接干扰力的低灵敏度,在支持的精密机器的内部模式中加入阻尼。在现在的工作中,提出了增强的控制策略,称为 双传感器 控制。我们将说明两个传感器控制优于传感器融合,因为它的回路成形可能性更大并且它具有更好的稳定性。这个两个传感器控制策略在设置的实验上验证成功。
关键词:主动隔振;振动控制;硬装载;两个传感器控制
1.前言
减振器被广泛地应用于高精度机器 (例如硅片扫描仪) (Heertjes,德格,amp; van der Toorn,2005年)。被动隔振器由物理弹簧和阻尼器之间的地板和支持的机器组成 (Rivin,2003年)。这种隔离器只能达到有限的性能是因为悬挂模式的大被动阻尼导致了高频率的较少隔振 (Karnopp amp; Trikha,1969年)。主动隔振器除了物理弹簧还包含了一种控制系统,实现了振动主动控制。
振动隔离器一般认为超过隔振系统悬浮频率的radic;2倍,通过分开的支持质量计算支承刚度的平方根。为了获得低悬挂频率(通常 1-2 赫兹),这台机器是通常安装在低刚度弹簧上,即所谓的软装载 (Heertjes et al.,2005年)。然而低的支持刚度会引起调配问题,它也使机器容易受到直接干扰力的影响(例如引起的电缆,加速阶段等)(范 Poel,2010年)。另一种方法使用积极的硬装载 (舒伯特,amp; von Flotow,1994 年;纳尔逊,2002 年;Tjepkema、范戴克 amp; Soemers,2011年;范 Poel,2010年)。其中提供更好的支持。由于悬浮频率较高 (通常 10 — — 20 赫兹)的地板振动传递率必须积极降低,使用软装载 (Tjepkema et al.,2011年)。积极降低悬浮频率的后果是,内部模式在频率也降下(Tjepkema et al.,2011年; 范戴克,2009年)。低阻尼内部模式结果相对下降程度较大的内部变形和沉降时间,和作为后果相对较大的偏差内机 (Holterman amp; 德弗里斯,2004年)。
为了提高主动隔振的性能,我们提出了一种同时满足三个性能目标的双传感器控制策略:(1)实现低频和良好的阻尼悬架模式,以获得低振动传递率,(2)提供坚固的支撑,(3)增加内部模式的阻尼。这可以表明,我们可以通过阻尼控制回路中的反共振来抑制主动硬安装的内部模式。我们还将显示当仅使用单个传感器时是不可能的。只要传感器和执行器并置,双传感器控制策略的结果始终处于稳定的系统中。控制器不需要内部模式的先验知识,因此不需要详细的模型,模型不确定性不会限制控制器的性能。本文提出的双传感器控制策略是从我们以前工作中提出的传感器融合控制策略(Tjepkema等,2011)开发的。使用传感器融合,加速度计和力传感器的输出被合并且反馈到单输入单输出(SISO)控制器。使用双传感器控制,为每个传感器信号设计分离反馈控制器,从而产生多输入单输出(MISO)控制器。因此,双传感器控制具有更多的环形成形可能性和更好的稳定性。
通过组合绝对运动反馈(例如使用地震检波器或加速度计)和力反馈的双传感器控制已经被用于几种隔振应用中。其中,Gardonio,Elliott和Pinnington(1997)研究了速度反馈和力反馈的组合,以减少从振动源到接收板的结构动力传递。 Hauge和Campbell(2004)在航空航天设备中使用双传感器控制来进行隔振,以满足地震检波器的低频性能和测力传感器的高频鲁棒性。Pantazi,Sebastian,Pozidis和Eleftheriou(2005)使用基于双传感器的H1控制,使得他们可以使用不同的传感器进行低频和高频范围来确定探头存储位置。 El-Sinawi(2004)和van der Poel(2010)使用双传感器控制来实现用于主动隔振的前馈反馈控制器,使用前馈传感器和用于反馈控制的机器传感器。然而,这些参考文献中描述的双传感器控制策略都不能直接用于同时实现上述提到的三个性能对象。因此,我们在本文中提出了一种双传感器控制策略,其特别旨在同时实现这三个性能目标。
本文的组织结构如下。 第2节描述了单传感器控制的局限性。 双传感器控制策略在第3节中对传感器融合进行了说明和比较。实验设置中提出的控制策略的验证见第4节。第5节和第6节分别提出了一个讨论和结论。
2.使用单个传感器进行反馈控制
本节首先介绍主动硬安装的工厂模型以及性能目标的定义。 随后,设计了单传感器控制器的控制器。 本节将讨论单传感器控制的局限性
2.1 平台描述
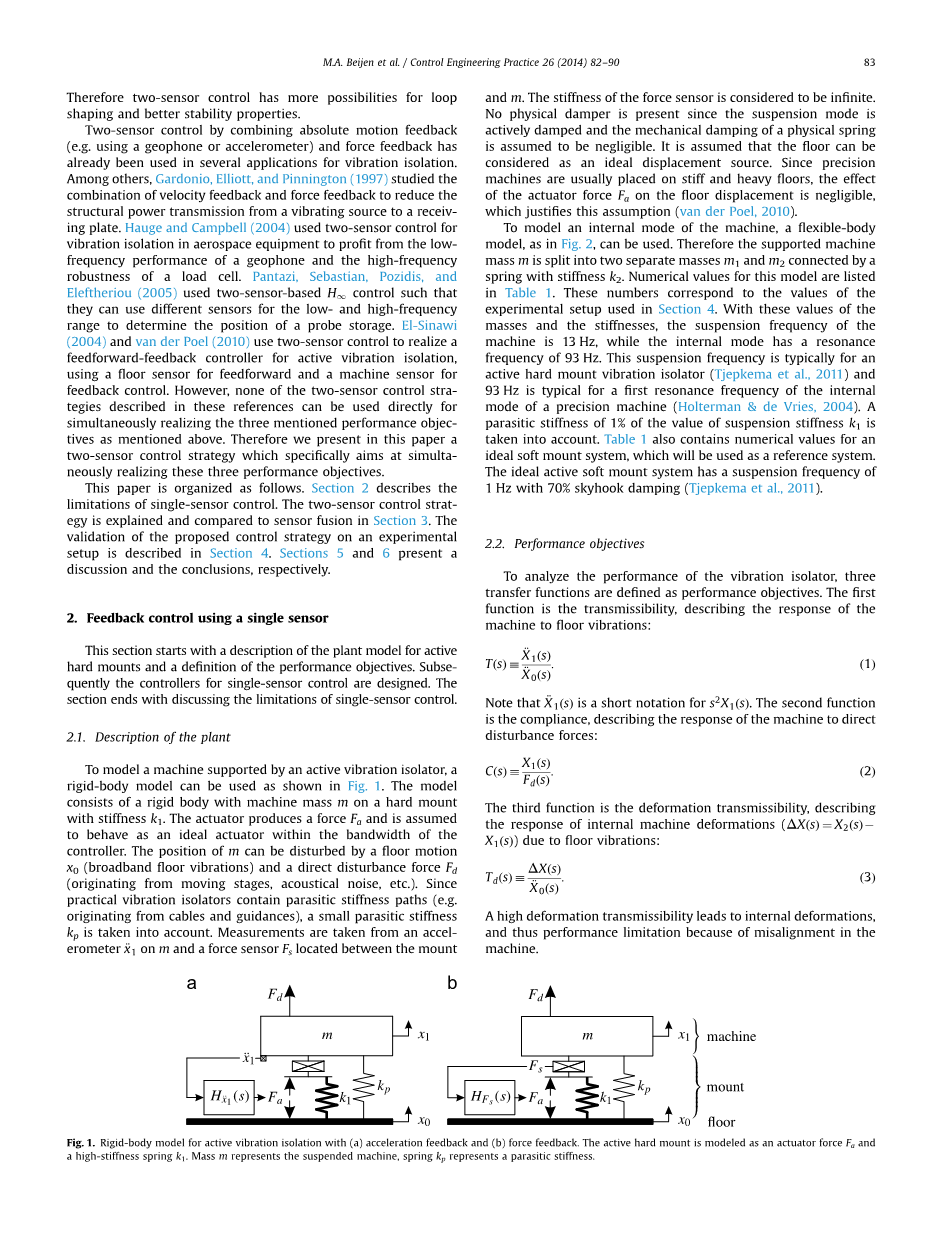
为了对由主动隔振器支撑的机器建模,可以使用刚体模型,如图1所示。可以使用模型刚体模型,如图1所示。该模型由硬度为刚度为k1的刚性机体组成。致动器产生一个力Fa,并被假定为在控制器带宽内的理想执行器。m的位置可能受到运动的干扰
x0(宽带振动)和直接干扰力Fd(声学噪声等)。由于实际的隔振器包含刚度路径(例如,从电缆和引导件引导),考虑到小的刚度kp。测量采用m的加速度计x1和位于安装座和m之间的力传感器Fs。力传感器的刚度被认为是有限的。没有物理阻尼器存在,因为悬架模式主动阻尼,并且物理弹簧的机械阻尼被假定为可以忽略不计。假设流域可以被认为是理想的位移源。由于精密机器通常放置在刚性和重型机翼上,致动器的力Fa对流量的影响可以忽略不计,这就假定了这一点(van der Poel,2010)。
为了机器的内部模式进行建模,建模如图1所示。因此,被支撑的机器质量m被分成两个由具有刚度k2的弹簧连接的分开的质量m1和m2。该模型的数值列在表1中。这些数字对应于第4节中使用的实验装置的值。使用这些质量值和刚度值,机器的悬架频率为13 Hz,而内部模式共振频率为93Hz。这种悬挂频率通常用于主动硬安装隔振器(Tjepkema等人,2011),93 Hz是精密机器内部模式的第一共振频率的典型值(Holterman&de Vries,2004)。考虑到悬架刚度k1值的1%的刚度。表1还包含了用作参考系统的理想软安装系统的数值。理想的主动软安装系统具有1 Hz的悬挂频率,70%的阻尼(Tjepkema等,2011)。
图1
2.2 性能目标
为了分析隔振器的性能,将三个传递函数定义为性能目标。 第一个功能是传输性,描述机器对振动的响应。
高变形传导率导致内部变形,因此由于机器中的未对准而导致的性能限制。控制器用过滤器延长,以提高控制系统的稳定性。
第三个功能是变形传递率,描述内部的响应的机械变形。
高变形传导率导致内部变形,并因此在性能方面对机器有限制。下表1为硬盘和硬盘系统的质量和性能。
2.3 控制器设计
本节介绍用于单传感器控制的控制器使用加速度或力反馈。 控制器用于降低悬挂频率的硬座和增加阻尼到悬架模式。
2.1 信号的返回
对于通过测量速度反馈,可以使用以下PI控制器来实现要求(Tjepkema,2011):
该PI控制器的物理解释是添加虚拟质量按比例(P)动作降低悬挂频率,通过积分(I)作用来阻尼悬架模式的阻尼(van Dijk,2009)。 数字Ka和Kv的值取决于期望的闭环传递性,即闭环悬挂频率及其相对阻尼。
从上式可以确定闭环参数omega;n和zeta;n可以设定为任何期望值,通过选择Ka和Kv的适当值来确定价值。 我们选择omega;n= 1。 2pi;rad = s和zeta;n= 0:7使主动硬安装系统的传输性能达到理想软件的传输性安装系统。给出这些控制目标,通过重写来计算控制器参数并使用表1中的数值。
上式表示具有加速度反馈的控制系统不会对所需的高静态负面影响
2.2 稳定性改进
控制器通过滤器延长以提高其控制系统稳定性。为了防止执行器饱和,控制器增益0.1 Hz的高通滤波器(omega;l= 0:1。2 rad = s,zeta;l= 0:7)。这个滤波器频率是10倍低于期望的悬挂频率(1Hz),所以滤波器不会影响控制器暂停频率下的动作。在高频时,控制器带宽由二阶低通滤波器限制,以防止稳定性问题以非模型化的高频动力学和传感器噪声。低通的转弯频率滤波器设置为20 Hz(omega;f= 20。2pi;rad = s),导致滤波器的衰减为50 dB,50 dB的衰减电平与软安装提供的衰减相当(Tjepkema等,2011)。可以设置低通滤波器的相对阻尼zeta;f,本文采用zeta;f= 0:07。 zeta;f的值越低,在omega;f周围的频率范围内进行更多的隔振。最后,在290Hz处为零(omega;z= 290。2pi;rad = s)以改善高交叉频率周围的相位裕度,其中环路增益的幅度的频率等于1。
2.3 模拟的结果
在图 3硬盘安装系统的性能与理想的软安装系统的性能进行比较,其中值列于表1中。被动软安装系统已经具有1 Hz的悬挂频率, 这是通过使用控制器用于Ka = 0和Kv的软安装。
图3(a)表示透射率T(s)。具有加速度反馈的主动硬安装系统和主动软安装系统的传输性在高达20 Hz的频率范围内是可比的。超过20 Hz时,低通滤波器会将硬安装座的控制器动作切断。具有力反馈的主动硬安装系统的传递性不是所期望的,因为可实现的悬架频率受到刚度的限制。
图3(b)示出了顺应性C(s)。使用加速反馈,静态符合度为1 =eth;k1thorn;kpTHORN;,它是期望。使用力反馈,静态符合度为1 = kp。软安装座的静态柔性约为硬安装座的静态柔顺度的170倍。
图3(c)表示变形传递率。对于软安装,主动硬安装的内部模式的谐振频率的大小比加速度反馈(66Hz)和力反馈(92Hz)都要高得多,这是不希望看到的。对于加速度反馈,内部模式频率降低,这也是不希望看到的。两种反馈策略都不能阻止内部模式。
a b c
3. 两个传感器控制
在2.2节中,三个表现目标是积极的安装系统定义。 第2.4节显示,这些目标中最多只有两个,即低传感性和低顺应性,可以与单传感器控制同时满足。在本节中,将显示可以满足所有三个性能目标同时使用双传感器控制(TSC)。 在本文中,TSC是一个组合加速反馈和力反馈。 本节介绍如何使用TSC来增加内部模式的阻尼给出了TSC的稳定性分析,并展示了如何使用TSC同时满足所有三个绩效目标。 在本节结尾处,显示SC胜过传感器融合Tjepkema等人描述的策略(2011年)
3.1 向内部模式添加阻尼
考虑图2中的闭环系统。 平台转移从输入j到输出i的函数Gij(s)可以从图2中的模型导出。 平台有三个输入,即一个加速度,直接干扰力Fd(s)和致动器力Fa(s)。 平台有三个输出,即加速度计,力传感器Fs,以及内部变形的虚拟测量。图2具有双传感器控制的闭环系统。图中已经省略了拉普拉斯算符
图2
图3加速反馈(灰色实线),力反馈的循环增益波特图(灰色虚线)和总环路增益(黑色实线)。 注意不同的反共振加速度反馈(66 Hz)和力反馈(92 Hz)的频率。
图3
其中c.l. 代表闭环,高等级L(s)结果内部变形强烈衰减。 另一方面, 阻尼反共振频率较差,内部没有主动衰减变形。 因此,L(s)在频率上不应包含较差的阻尼反谐振
内部模式必须被阻尼的范围。 从图3观察到,两者的含义和含义都包含在内。
3.1.1示例:阻尼内部模式
该示例表示可以在控制回路中使用双传感器控制抑制共振。这是有可能的,因为反共振频率彼此不紧密(66 Hz对92 Hz)。 但是,当反谐振频率几乎重合,加速度反馈和力反馈都不能对系统施加强大的控制来控制那个频率。其结果是,总和环路增益在该特定频率下仍然具有反谐振,导致内部模式仍然很差。在我们的示例中,由于质量比m2 = m1足够大,反共振位置彼此相距足够远。
图4
3.2 控制器设计和建模结果
为了满足第2.2节的所有三个性能标准,加速反馈(第2节)用于低频率,TSC(第3.1节)用于高频率。TSC限制了加速反馈控制器的速率.这些值是相同的,单传感器控制的力反馈控制器(20)不用于TSC,因为它不再扮演虚拟质量和阻尼的角色。在低频时,控制力反馈的控制器增益必须限制,以防止失真。这是实现由二阶高通滤波器20赫兹的频率(omega;ffrac14;20。2pi;rad = s)。
下图为波德图。在低频率,加速反馈是显性的,因为力反馈受到寄生刚度效应的影响。在高频的情况下,外相特性得到了加速度反馈和力反馈之间的关系。波德图显示的影响不同r
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141787],资料为PDF文档或Word文档,PDF文档可免费转换为Word



