船舶发电机模拟装置外文翻译资料
2022-10-16 16:00:45
英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
船舶发电机模拟装置
摘要
现代电力推进的船舶上有许多系统。考虑到故障,恶劣的天气,复杂的海上作业的影响,研究系统和子系统时,对各个系统之间的相互作用和集成的研究是必要的。大部分的模拟装置,包括本文提出的模拟装置,主要分为定位系统和电力系统。本文介绍的模拟装置将两个系统结合起来,作为一个船用系统模拟装置MATLAB/Simulink数据库的扩展。同时介绍了预设案例和装置的选型。新的子系统模型包括基于动力的电气总线模型和简化的柴油机模型,两者通过仿真对建立的模型进行了验证。此外,对发电机、蓄电装置、推进器和常见的柴油机模型进行了总结。模拟装置在诸多领域的应用如下:1)受到环境影响的半潜式钻井平台;2)由电气总线决定的船舶的重新配置;3)混合动力的补给船。
关键词:航海技术、船舶、电力系统仿真、动力定位。
一、简介
A.船舶电力系统
对于大部分现代船舶上的操作系统来说,电力系统是最重要的。具有动力定位功能的柴油机电力推进装置在油气船和游轮上较常见。受水流、海浪、风影响的定位和机动运行能力主要取决于发电机的容量。电力不足可能会导致DP工作性能降低及定位不准,当电力极度匮乏时甚至会对船舶失去管制,导致船舶失控。
电力系统的功率容量、分配和冗余是一种降低电力系统故障风险的机制。这种保护机制的成本比较高。对于运行时间没有严格要求的设备、机器长时间运行所需要的维护保养、排放物的增加和燃油消耗的增加来说,经济性是一个重要的指标。
本文对于新型发电机控制方法和新能源利用有着积极的的作用。由于船舶发电机的复杂性、其内部紧密复杂的联系及能否充足供电的电网,数学模拟对于设计,实施和操作的各个阶段来说,是一个重要的工具。
B.准备工作
目前的一些船舶发电机模拟方案,使用的范围从商业领域覆盖到研究领域,内容从几个状态方程扩大整个软件系统。例如:
船舶控制论cybersea的主要内容为流体力学、电机学的模型和传感器 [1] 。它是在HIL测试 [2] 和动态性能分析 [3] 中使用的。
美国海军研究办公室的电动船研究与发展联盟的研究包括HIL仿真器[4]、高保真度的模型[5]、混合发电机[6]。
海洋系统模拟装置(MSS)数据库和MATLAB/Simulink模拟装置是由 [8, Sec. 1]海洋GNC工具箱[ 9 ]、MCSIM [ 10 ]和DCMV[ 11 ]组成的。它包括船舶动力学、环境(波浪、海流、风)负载、先进的推进器模型。
DNV GL的芝麻海洋风险管理软件 [12]包括海上作业MARINTEK的模拟(SIMO)运动和定位模拟装置。该系统能够进行多体建模。
意大利一体化的船舶发电机模拟装置通过Simulink实现了一个电力系统的集成模型 [13]。
NTNU模型包括发动机的功率消耗[14]和功率管理系统[15]。
NTNU的键合图模型[16]数据库包括船舶模型。通过全面的实验验证了该数据库。
一些解决方案主要集中在没有考虑到实际DP性能和相关消耗的电气系统。
C.模拟系统的设计
本文提出的模拟装置是一整套系统模拟装置。它的目的是模拟复杂系统内部各子系统之间的联系,通过模块化设计,实现了可以在不同的情况下进行研究。
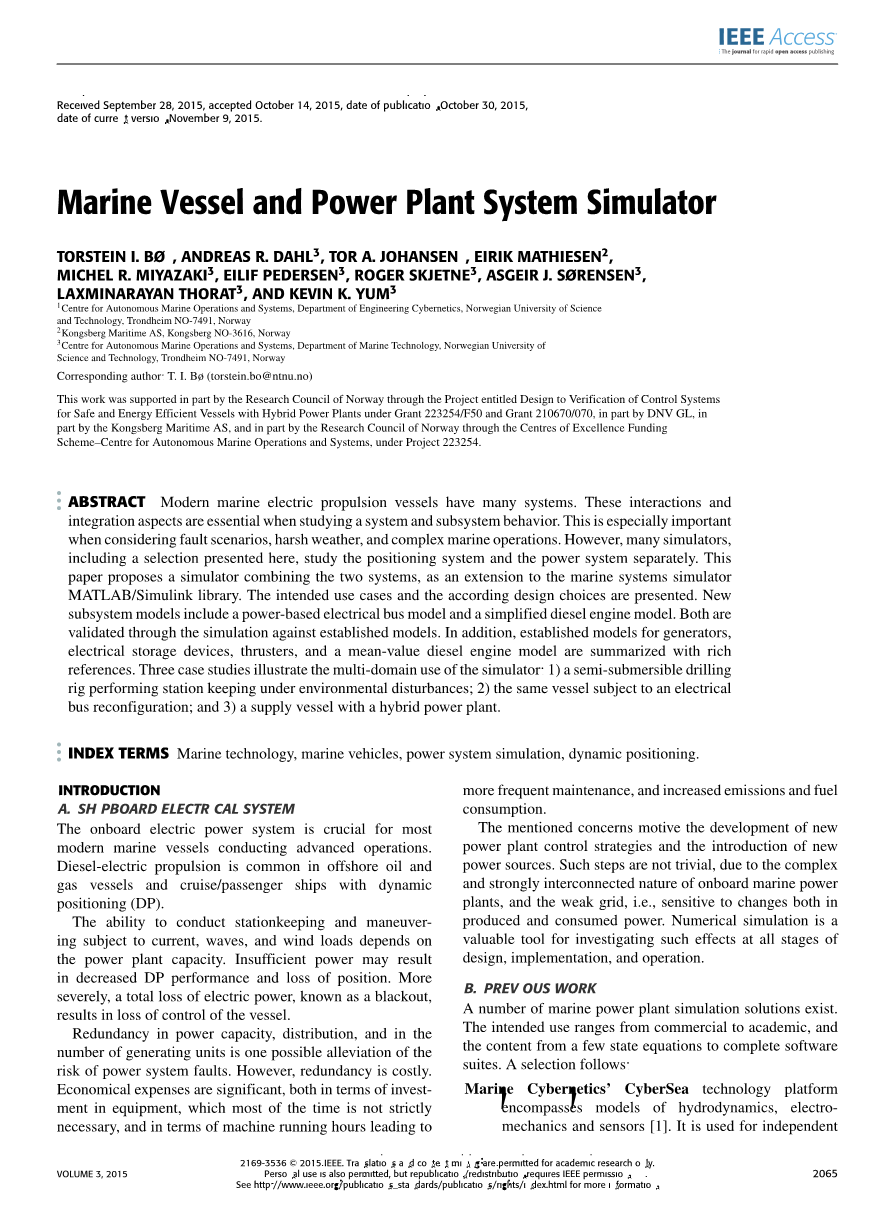
模拟装置的使用案例对我们需要进行建模和参数化的动力学有很大的帮助。多物理模拟装置的发展经过了几十年。为某一项特定的研究确立一个时间单位是必须的。在电力系统中,最小的时间单位是毫秒,准静态的研究如磨损的影响的时间单位是月和年。模拟短路时,必须对快速的动态变化进行建模,而环境的影响、磨损,可以假设为常数。因为电力系统的时间单位比船舶运动的时间单位小得多,电力系统可以被认为是在稳态模拟DP操作。图一列出模拟装置的时间单位。同时下文提出了不应忽略的组件模型。
随着组件的数量的增加和保真度水平的提高,系统模拟装置的复杂性也提高。随着保真度提高,需要更多高阶模型结构的参数和更彻底的验证,不过运算速度也会降低。研究较高的保真级别是必要的,但只要模型还原做得合适,并不是所有的子模型需要较高的保真度。通过采用模块化设计,可以容易地通过低高保真模型来确定哪里需要更高的保真度,从而将这些模型替换为高保真度的模型。由于其具有较高的复杂性,验证和校对系统模拟装置是有难度的。每个子模型可以进行自身验证,不过这不能说明当它们整合在一起时的情况。小规模或满量程测试可用于验证,但其成本较高,同时耗时较长。在大多情况下,通过一组经过训练人员的经验来预测系统性能是最实用的方法。
D.使用案例
很多研究领域都是用了模拟装置。
典型使用案例如下:
实时功耗性能:DP控制器和推进器模型与发电机相连,电力负荷波动以真实的方式来呈现。许多控制子系统之间的相互联系有PMS、推力分配、推进器扭矩或速度控制之间的相互作用[17]。模拟装置可以给分离出的子系统生成时间序列。(例如:柴油机模拟装置)。
故障结果分析:发动机可能出现的各种故障都可以通过模拟装置模拟出来[18]。 对DP性能进行分析,当假设推进系统是在稳定状态时,可以提高其性能的分析结果的准确性。发动机的瞬时变化也是十分重要的[3]。建模的详细级别包括每个子模块的状态参数,比如温度和功率输出。基于这些数据,废物排放量、维护保养和燃料的消耗可得到优化。
概念评估:较新的子系统的子模块,例如能量存储装置(ESD),可以连接到模拟器。这可以达到对新能源、整体控制和发动机性能进行研究的目的。
必须强调的是,模拟装置并不限于柴油电力推进,也不限于DP操作。
E.贡献
本文的重点在电力系统和DP系统的集成模拟器的建模。通过建立和验证一些新模型,来获得所需的精确度级别下的性能。大部分模型都是通过文献来验证的。模拟器的范围从高级别控制系统如定位系统和电力管理系统(PMS),到发电机(组)的存储、消耗的高精度模型诸如发电机组、电池和推进器。由于系统的复杂性,模拟装置的精确度必须进行定性验证。发电机定量验证的研究还未完成,不在本文做叙述。
本文是[ 19 ]的一个扩展,包括了模型的更多细节。此外,也提出了新模型的验证和新案例。
F.本文概述
本文由三个部分组成,第一部分介绍了模型的建模。第二部分对新模拟装置进行了验证。第三部分进行了展示。建模部分以模拟装置的概述为开始,接下来是电力管理系统的细节部分。介绍了交换机和发电机的电器元件。接着介绍了两个柴油机的模型,然后是推进器模型。最后是船舶的动力学模型、环境影响和DP控制系统。第二部分提出了电气总线的验证和简单的柴油机模型介绍。最后一部分,介绍了模拟DP作业的钻机状态,在其接通电源之前就可以找到模拟装置的故障。
二 建模
A.模拟装置概述
仿真的主要假设是:
稳态电力系统:通过假设电力系统在稳定状态下,来获得实时的电力性能。模拟装置动态变化时间单位为秒,而电力系统的动态变化时间单位为毫秒,因此可以假设其为稳定状态。这在第二部分A版块进行了验证。模拟电气变量的参数有频率、电压、有功功率、无功功率。因此模拟诸如低/超频率,欠/过电压故障的缓慢发展和逆功率等故障是必要的。然而,不能够模拟相位不平衡,瞬态电压故障,短路,和谐波失真。
中值发动机模型:柴油机以中值发动机模型为基础。大部分的柴油机系统部件在数学上的建模遵循物理定律。通过简化气缸内的过程,使它能给出一个周期内的平均输出如平均扭矩、燃烧气体的质量、释放的能量。
电力管理系统:PMS可以确保发电机安全有效地运行。在第一部分的B版块进行了详细的介绍。
保护继电器:断路器可通过定时器进行跳闸,保护继电器不需要建模。一些自定义保护继电器需要进行设置来模拟一个局部停电。当断路器断开时,可以进行检查。
定距变速器:假定该推进器是定距螺旋桨,可以进行变速运行。方向推进器和定向推进器可以向着任何方向旋转进行模拟。(如:隧道推进器)
使用针对研究对象的建模结构对船舶电站进行建模。模拟装置中的每个模块代表一个船舶上的组件,并且以子系统模块来表示更大的系统内部的组件。该模型的层级示图如图二所示。这个图表示了使用DP控制器的船舶运行控制时信息的传递。在运输、机动、或其他不使用DP控制器的操作时,推进器的给定值可以进行手动设定。
该图含有:
- 监控器;根据船舶的测量结果来推测船舶的运行速度和位置。
- DP控制系统;运算给定的推进指令。
- 推力分配(TA);将给定的推进指令转换为推进命令并传递给推进器。
- 推进器型电动系统;将推进命令转换为实际的推进动作,消耗电能。
- 环境模型;对环境进行模拟来生成负载。
- 船舶模型;计算在给定推进器和环境负载情况下船舶的运动
- 中央;此模块用于公共计算。
此发电机是在电力系统内部进行建模.图3介绍了一种发电机模型,它包括:
- 发电机组;包括一个原动机(例如,柴油机)、一个发电机、一个调速器、一个自动电压调节器(AVR)。
- 推进器驱动器;包括一个频率转换器、一个电动机、一个推进器、控制器。
- 其他组件;按照预设顺序来进行建模的钻机负载。该模块也可用于存储能量,如一个带有变频器的电池。当模块提供电能的时候,负载连接在负极。当模块消耗电能的时候,负载连接在正极。
- 配电板:连接负载和发电机。
- 断路器:控制元件的通断。
选择Simulink是为了扩大MSS工具箱[8]以容纳更大的推进装置模型和发电机。但是选择Simulink也有不易进行内部建模的缺点。根据Simulink的子系统结构很难将系统分为几个级别。我们使用顶级模型视图来研究船舶控制。该发电机是此视图中的一个子系统,通过一个单线图来表示。因为本地控制器给出一个不可修改的模式,所以使用硬求解器ODE15S来作为数字求解器。
一阶低通滤波器用于防止代数循环。由于有时需要忽略一些快速的动态变化,所以这个滤波器的时间单位要比相关模型最快的动态变化时间单位要小。滤波器可以看做忽略动态变化的简化模型。依赖于功耗的可用功率会产生代数循环,同时可用功率也限制了功耗。这可通过在电源上增加一个比耗电原件的时间单位更精确的低通滤波器来解决。同时可以对这些信号进行延迟处理和离散时间处理,但这降低了隐赋求解器的性能。
B.电源管理系统
使用PMS可以确保有足够的总可用功率,防止断电。如果发生断电,应尽快恢复电力系统。当发电机的额外功率太低时,PMS会启动其他的发电机。PMS通过计算发电机的功率,根据耗电原件的额定功率和优先权将电能分配给不同的耗电原件。可用功率的信号发送到一些耗电原件中,表明这个特定负载的最大功率限制。在一些特殊的情况下需要进行卸载(断开耗电原件)操作,并且当电源功率降低时必须立即完成(如:将频率降到最低)。
快速减载是迅速降低功耗的另一种方法。频率转换器可以快速的改变功耗,降低推进器驱动器负载。当清除故障或增大电源容量后,可以增加驱动器负荷。连接发电机组后逐步加载的过程中PMS可以通过调整垂直同步负载共享参数来调整负载分配。逐渐增加负载是为了使发电机产生的电力慢慢从空载增加到所需要的负载。
PMS算法通过C 和S-功能模块实现的,并且可以配置到不同的发电机上。模拟器的工作重点在PMS的实施,同时可以实现如自动启动和停止的新功能。
C总线电压计算
总线电压需要利用发电机分担的负载来计算。发电机的并联连接如图4A所示。负载被假设为独立的母线电压,其有功功率和无功功率都属于已知。Thevenin等效电路如图4B所示,连接发电机组用于计算母线电压。此电路由已知电能消耗和未知的阻抗负载来计算。
公式如下:
(1)
Pbus和Qbus分别为负载的有功功率和无功功率,V是每相的母线电压,I是电流,E是戴维宁等效电压,Z是戴维宁等效阻抗。公式(1)可能有一种解、两种解或无解。当有两个解时,通常选择绝对值较大的总线电压来作为结果。最大的电压可以使阻抗变高电流变低,使内部消耗的功率降低。低电压得到的电阻比戴维南等效电阻小,这是不符合物理定律的,因为大部分的电压降低发生在阻抗的内部,这样就产生一个高电流,使内部功耗增大。
在模拟期间可能发生无解的情况。这可能会出现在负载急速增加(只存在一个负载)和发电机的戴维南等效电压迅速下降(AVR发生故障或发电机断开)的情况下。在这种情况下,电压被设置为一个较低的值。这会使负载分配发生错误,但AVR电压会快速增长。在第二部分A的验证中,总线电压在0.1毫秒内恢复正常。相比于机械系统的时间单位,这个时间可以忽略不计。当有模拟电压保护继电器时,必须连接低通滤波器。
D.发电机
在船舶发电机上,通常用同步发电机产生动力。如前面提到的,发电机被假设为处于稳定状态,并具有平衡相。电气转矩公式是
(2)
其中p和Ploss是发电机的有功功率和功率损耗,r是定子绕组的电阻,q是无功功率,v是终端电压。终端线对中性点电压为[20]:
(3)
其中Z是发电机组的内部阻抗,Ia是相电流,Ea为感应线 - 中性点相电压。通常假设Ea的大小完全由AVR决定或比机械系统的动态变化快得多。这在第二部分A版块进行了验证。Ea的相位角为:
(4)
theta;是机械角,Npoles是发电机的极数,参数根据[20]所知。
AVR通过操纵感应电压调节端电压。在该模拟装置中,使用一个垂直控制器,将发电机组的无功功率设定为给定值。这需要分配无功负载。如果发电机电压下降曲线相同,则会提供等量的无功功率。
E.柴油机lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[151169],资料为PDF文档或Word文档,PDF文档可免费转换为Word



