一种新AUV控制体系的开发外文翻译资料
2022-09-22 10:22:27

英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
一种新AUV控制体系的开发
摘要:本文提出了一种新开发的自主水下航行器(AUV)的体系结构,名为KAUV-1,设计成一枚鱼雷的样式,具有重量轻,体积小的特点,适合用于海洋勘探和监测。KAUV-1有一个独特的导管螺旋桨在尾部的位置偏航时驱动作为舵。深度运动,KAUV-1设计质量移器机制改变车辆重心和内部控制其螺旋角和深度运动。本文还提出了一种分析的运动方程KAUV-1大规模移器机制和一个新的深度KAUV-1控制策略。KAUV-1的可行性仿真实验验证了所提出的控制策略及其性能。
关键词:水下机器人平台、深度控制、质量移动机制、鱼雷状
- 简介
如今,由于自主水下航行器(AUV)具有广泛应用在海洋经济、海洋科学、海上安全和海军的能力,使其成为世界上许多研究人员极感兴趣的研究课题。在机动精度之外,航行器自主操作时间也是一个重要因素。因此,水下阻力低,使能耗减小,从而可在水下运行很长时间的鱼雷状AUV,具有较好的发展前景。
鱼雷状AUV通常在尾部配一个固定的螺旋桨,用鳍控制驱动系统。各种鳍配置已经得到应用。例如:在REMUS- 100[1]中两对十字形模式鳍控制偏航和俯仰,在[2]中一对垂直的鳍尾控制偏航和两双水平鳍在首部和尾部提供倾斜控制,在REMUS- 600[4]中四个独立鳍形成十字形图案Ivert2[3]或三个独立的鳍构成一个倒“Y”模式,其不仅提供偏航和俯仰控制,还可以提供滚动控制。然而,这种AUV的缺点是运用鳍控制系统,在低速航行时不能有效的工作。
为克服上述障碍,okpo - 300[5]在首部安装了一对垂直的螺旋桨和一对水平螺旋桨,分别控制航行器的倾斜和偏航,而不是用鳍。然而,这种AUV的构架需要更多的空间来安装其螺旋桨,且需要更多的能量来完成操作。
更高级的AUV没有任何的体系结构鳍被设计为蓝鳍[6],它的螺旋桨在一个双万向节排列可以驱动水平方向和垂直方向,既是一个方向舵和一个升降舵。在这个配置中,航行器更干净整洁,控制系统更小。然而,航行器的方向舵和升降舵与单螺旋桨相似,所以他们之间的互操作性可能是非常有限的,例如,假设在急转弯时伴有转动,结果产生了不理想的深度变化。这个问题需要一个耦合控制系统同时使用方向舵和升降舵使干扰深度最小化,该言论在[7]中被提到。
本文提出了一个新的AUV架构,命名KAUV-1,适合海洋勘探和监控。它的设计可以克服上文提到的缺点。其位于尾部的导管螺旋桨,只能作为一个舵在水平方向驱动。对于升降舵,KAUV-1使用质量切换机制,类似于一个经常使用的水下滑翔机。例如,Seaglider, Spray和Slocum [8],利用改变了航行器重心来控制自身倾斜角,然后控制其深度。另一种改变重心的方法是使用压载系统,像ITB-SGAUV[9]中。然而,这些压载系统占了很大空间,使航行器较大。此外,控制倾斜的反应是缓慢的,而且重心可能由于自由面运动和压载舱液体晃动而产生振荡。这些问题导致利用压载系统的航行器性能不好。所以,KAUV-1使用质量移动装置代替压载系统来实现升降。对于提出的结构,方向舵和升降舵完全分开,因此,它很方便的使用两个控制系统。此外,倾斜的控制是由质量移动执行的,而偏航的控制是由水平螺旋桨执行的,即使是在航行器低速运行。
在水下滑翔机中,在上升或下降时所需的螺旋角是预先确定的常数,它是靠浮力发动机和大规模移动装置驱动。水下滑翔机的轨迹线是齿状的和深度的超调量没有太大关系。此外,滑翔机控制器可以关闭,或“休眠”,可间隔节约能源[10]。这些推断水下滑翔机深度控制的性能不是那么重要。与水下滑翔机不同,KAUV需要有很好的深度控制性能。它应该能够快速移动到所需的深度并保持这个深度没有过度。因此,在KAUV-1中提出了一个特定的深度控制和倾斜控制策略,即大规模移器机制的深度控制器。
本文将提出的架构中,方程运动和深度控制策略是为KAUV-1开发的。深度控制策略通过仿真和实验进行验证。
术语
无负荷时导轨表面的阻力
总摩擦力
法向力
倾斜转子受力
移动媒介的质量
活动质量
活动质量的重力
沿轴线方向的投影
沿轴线垂直方向的投影
滚转率(物体固定参考系)
俯仰率(物体固定参考系)
偏航率(物体固定参考系)
沿轴线的速度(物体固定参考 系)
左右速度(物体固定参考系)
升降速度(物体固定参考系)
活动质量重心沿轴线方向的固定坐标
所需的活动质量的位置
航行器重心沿轴线的固定坐标
航行器重心沿重力方向的固定坐标
航行器重心沿垂直轴线的物体固定坐标
航行器惯性坐标的分量
航行器惯性坐标的分量
航行器惯性坐标的分量
横摇角(惯性参考系)
螺旋角(惯性参考系)
偏航角(惯性参考系)
推进系统与航行器中心线纵轴之间的角度
导管表面的摩擦系数
2.成熟航行器的架构
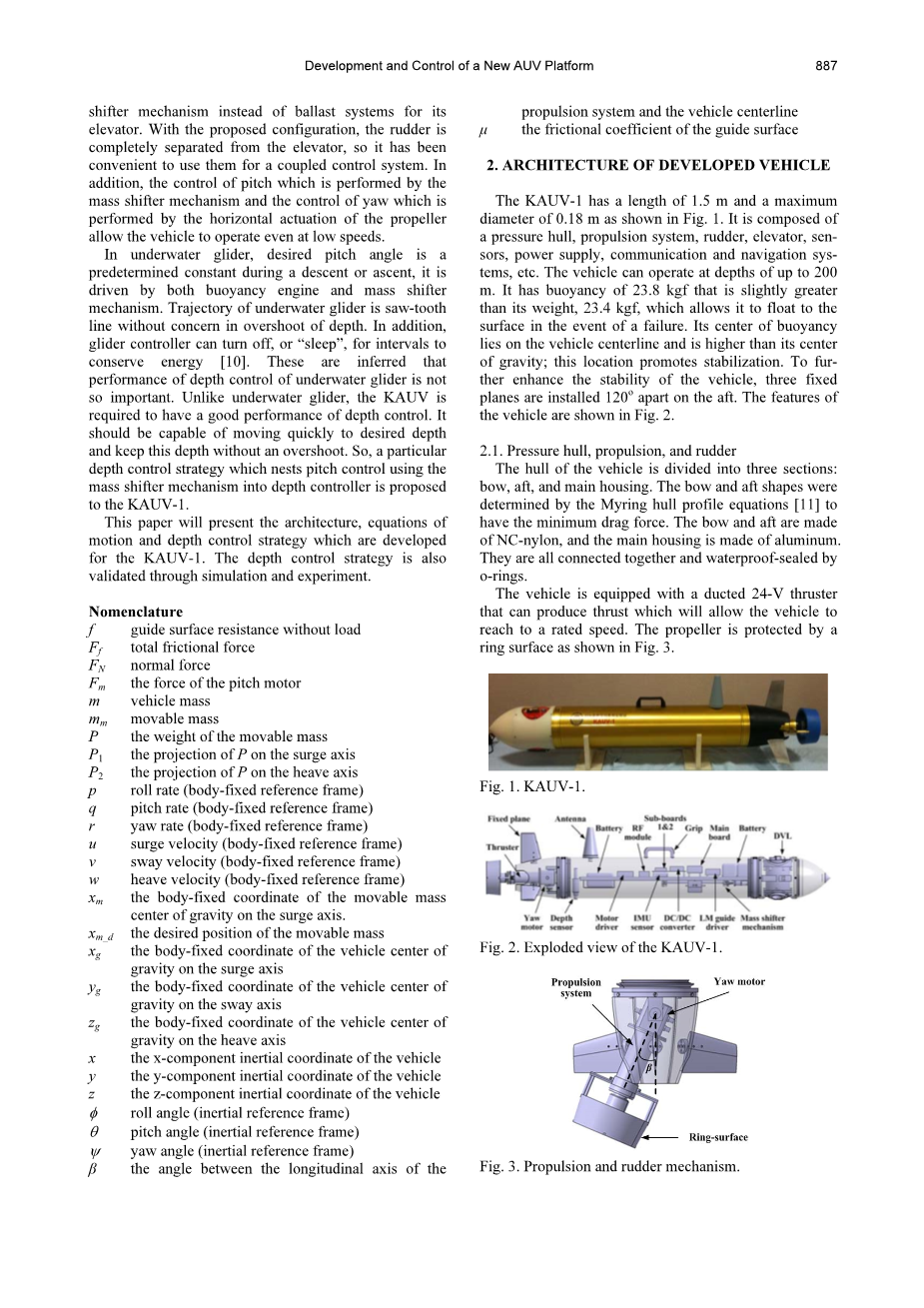
KAUV-1有1.5米,最高的长度直径是0.18米,如图1所示。它由耐压壳体、推进系统、舵、升降器、传感器、电源、通信系统和导航系统等组成。航行器可以在高达200m深度处。它有23.8 kgf的浮力略大比它自身23.4kgf的体重,发生故障时表面会浮上来。其浮心位于航行器中心线和高于它的中心重力,这个位置促进其稳定。为了进一步提高航行器的稳定性,在尾部安装三个相距120度的翼,此航行器的特点如图2所示。
图1.KAUV-1
多普勒测速仪
接收器
直流变换器
质量切换机制
光学导向驱动器
传感器
电动机
测深仪
偏航电机
电池
主甲板
握把
甲板1,2
射频模块
电池
推进器
固定尾翼
图2.KAUV-1的部件分解图
2.1耐压壳、推进器和舵
航行器的壳体分为三个部分:首部、尾部和主要的舱室。首部和尾部的形状由米林船体剖面方程确定[11]可获得最小的阻力。首部和尾部由NC-nylon制成,主要的舱室是用铝做的。他们都是连接在一起的,并且用防水的密封环进行密封。
该航行器配有24 v输送电压的推进器,产生的推力可以使航行器达到额定转速。螺旋桨是被环状表面保护,如图3所示。
环形保护面
偏航电机
推进系统
图3.推进器和舵机的原理
表1.电机和推进器及舵机使用的驱动器的参数
|
推进器电机 Maxon,无刷,200W 最大推力:36N |
偏航器电机 RX-28 Robotis,有刷 29W,包含驱动器 |
||
|
额定电压 |
24V |
额定电压 |
15V |
|
额定电流 |
9.21A |
额定电流 |
2.4A |
|
额定转速 |
16200rpm |
额定转速 |
126rpm |
|
额定扭矩 |
114mN.m |
额定扭矩 |
2.6N.m |
|
推进器的传动器(CUBE-BL2416_SIH) |
|||
|
电源电压 |
10~30V |
||
|
额定电流 |
16(32)A |
||
|
额定功率 |
400W |
||
|
脉宽调制频率 |
2~100kHz |
||
推进系统可以使航行器垂直轴左右旋转15度,如图3所示。舵使用15V直流电机使航行器进行偏航运动(命名为偏航电机)。如果推进系统的纵轴和航行器中心线之间的夹角beta;是非零的,此时将产生一个转舵命令使航行器偏转。当beta;为零是,两条线是重合的,没有命令产生。
推进器和舵机的电机参数如表一所示。
2.2传感器、导航系统及通信
航行器配备一个惯性测量单位——Xsens MTi IMU(包括指南针),一个深度传感器-,一个温度传感器,多普勒速度记录仪---NavQuest 600 DVL,GPS(全球定位系统)接收机--AsteRx1,射频收发器——24 xstream射频模块和Antcom天线。惯性测量单元包含加速度计和陀螺仪,即提供数据角速度和特定力量的惯性导航系统(INS),来计算航行器的速度、姿态和位置。多普勒测速仪可以测量航行器的速度和高度。INS中的错误随着时间的推移被累积,他们被称为漂移。使用一个卡尔曼滤波器,处理来自其他独立传感器/设备的数据,例如,指南针、深度传感器、DVL和GPS接收器等,以减少偏差。包括INS和一个卡尔曼滤波器的系统被称为辅惯性导航系统,如图4所示。KAUV-1使用2.4GHz的24 xstream射频收发器,可以在16公里的范围与表面站进行通信。表2列出了这些设备的特点。
状态测量
状态
深度测量
速度
深度
定位
预算
卡尔曼滤波器
速度测量
航行方程
加速计
陀螺仪
图4.辅惯性导航系统
表2.传感器、定位器、频率收发射器的参数
|
GPS 接收器(Septentrio-AsteRx1) |
精确度: lt; 0.7 m |
|
频率收发器 (24XStream) |
输出功率: 50 mW 频率: 2.4 GHz 范围: 16 km 数据速率: 9.6 ~ 19.2 kbps |
|
惯性测量单元 (Xsens MTi) |
静态准确度 (滚动,倾斜): lt; 0.5° 静态准确度 (偏航): lt; 1° |
|
多普勒测速仪 (NavQuest 600) |
最大速度:plusmn;20节 精确度:lt;0.2%plusmn;1mm/s |
|
深度传感器(Sensys-PSH) |
输出:0~5V 精确度:plusmn;0.15% |
2.3控制系统架构
控制系统包括一个用iec - 667嵌入式系统的主板和两个使用数字信号处理器(DSP)的 分支电板TMS320F28346、TMS320F28035。数字信号处理器 TMS320F28346(sub-board1)连接到所有的传感器,例如:惯性测量单元(IMU)、导航设备、深度传感器、多普勒测速仪和GPS接收机,接收他们数据运行算法程序和卡尔曼滤波计算航行器的速度、状态和位置,然后将计算结果传到主板。数字信号处理器TMS320F28035(sub-board 2)接收主板指令控制倾斜马达和推进器马达。主板可以与分支电板1 amp; 2、RF收发器及偏航马达驱动程序进行联系。
当航行器在水面上时,RF收发器接收器从地面总站接收命令并传送到主板。使用从sub-board 1和射频收发器获得的数据,嵌入系统的主程序直接控制偏航电机,并发出指令到分支板块2控制倾斜电机或推进器电机。图5给出了KAUV-1控制系统的结构框图,图6显示了开发的控制系统。
分支板块2
主板
分支版块1
KAUV-1控制系
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148211],资料为PDF文档或Word文档,PDF文档可免费转换为Word



