用于绞吸式挖泥船的优化操作与控制的专家系统外文翻译资料
2022-09-01 18:03:06
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
用于绞吸式挖泥船的优化操作与控制的专家系统
- Jian-Zhong Tang, ,
- Qing-Feng Wang,
- Zhi-Yue Bi
- State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou, Zhejiang 310027, PR China
Available online 1 March 2007
Show more Show less
doi:10.1016/j.eswa.2007.02.025
摘要
手动控制的疏浚过程产量低、效益差。为了提高产量、降低单位成本,疏浚过程的自动控制是所希望的解决问题的办法。世界各地的学者们已经积极地研究疏浚作业的自动化很多年了。根据以前疏浚作业的研究结果,本文旨在介绍实现在线操作优化和疏浚过程自动控制的专家控制系统。将会介绍基于专家系统来处理这些问题的细节。本文的重点放在结构、知识呈现和专家系统的推理机制。用C 开发一个专家控制软件程序。基于测试平台上构建的专家系统的性能是通过比较进行评价的。实验结果表明,专家控制方案能在疏浚作业中展示出令人满意的性能。
关键字
自动疏浚;专家控制;知识组织;绞吸式挖泥船
第一部分 介绍
大量投资已经投入到了疏浚设备和工程维护中,高效使用设备使其达到最大产量,对于保持盈利运行是至关重要的。然而,有效地估计和控制实际生产是相当困难的(Miertschin amp; Randall, 1997)。如挖泥船工作环境中一些关键参数是未知得或者获得的参数精度太差。在实际的操作中,有经验的工人经常注意疏浚过程中的一些间接的信号,如指示的真空度和压力、发动机转速、船的振动强度、或泵和管道发出的异常噪音。根据获得的间接的信号,当认为有故障可能发生时,有经验的操作人员会采取一些紧急措施,如控制切割速度、摆动绞车车速和发动机转速。获得的信号和采取的措施之间的关系非常复杂,他们不能很容易地以某种数学模型或准则得出结论。
目前世界上超过数以万计的挖泥船正在被使用,而95%以上的挖泥船都是手动操作的。据荷兰IHC作出的调查,操作者的经验不同,操作的结果差距会很大,它们之间的差距会随着操作人员的连续工作时间增加而减小。为了获得最大的产量,智能控制解决方案可以有效地利用操作者的经验,并且有望从操作中进行初步的学习(IHC, 2004 and Miedema, 2001)。随着计算机技术的高度发展,学者们和开发商们正在积极探索疏浚作业过程的自动控制。荷兰IHC,最重要的挖泥建造商之一,已在该方面取得了一些进步(IHC, 2004a)。日本学者曾经提出了一个基于模糊逻辑的疏浚控制系统,它已经获得了操作经验、传感器输入和来自实验室的实验一些特殊的知识,但并没有对其实际性能做出进一步报告。
传统的控制方法已被证明适用于大多数场合。但是对于一些情况,挖泥船生产的优化会随着需要太多基础知识的支撑而变得复杂。以前的一些成功的案例已经证实了智能控制的优越性(Wang and Wang, 2005 and Uraikul et al., 2000)。专家系统提供了强大的工具来处理复杂的系统。在过去的十年中,基于ES技术已被广泛应用在控制和监视工程实践中。疏浚过程是一个高度不确定的非线性系统,流体力学和多相运输的一些基本情况尚未被完全理解。荷兰代尔夫特大学和中国河海大学疏浚实验室的研究小组在疏浚过程的理论描述已经做了一些改进(Ding and Ni, 2002, Matouscaron;ek, 2001, Miedema, 1984 and Nietal, 2001)。但是,目前的理论成果严重拘泥于现状,与真实复杂的挖泥操作过程环境还有很大的区别。在手动疏浚过程中,工人作出的控制行为在很大程度上依赖于在过去的实践中积累的经验。开展以知识为基础的方案,它可以模拟疏浚工人的推理和评估过程,是一个自然想法下的疏浚过程的自动控制。本文重点旨在介绍实现实时优化和绞吸式疏浚作业过程控制的专家系统的开发。
本文组织如下:第一部分简要介绍了建立疏浚专家系统的背景。第二部分对构造和绞吸式挖泥船工作过程进行介绍。第三部分给出了自动化疏浚过程的优化和控制问题的详细说明。第四部分介绍发展专家系统的结构。第五和第六部分处理ES的知识表达和推理机制。 第七部分简要介绍用于评价所提出的ES的性能疏浚系统的配置。在第八部分 ES的实验结果展示和比较。最后的部分是得出简要的结论。
第二部分 构造和绞吸式挖泥船工作过程介绍。
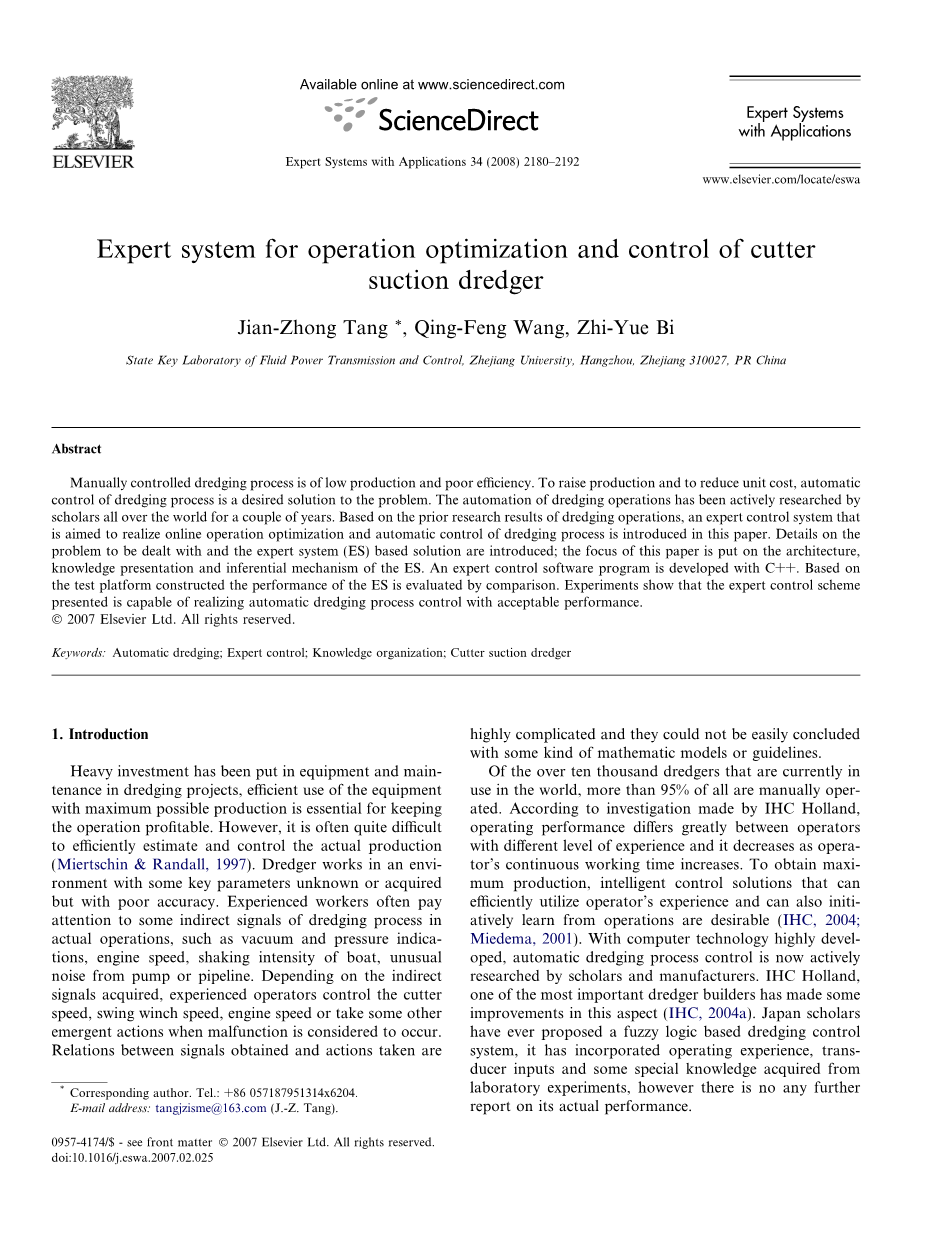
一个典型的绞吸式挖泥船的样品轮廓如图1所示。 绞吸挖泥系统可在功能上划分为四个子系统,即浆料输送系统、切割系统、液压系统、监测和控制系统。
Auxiliary engine-辅机 primary engine-原动机 cutter-绞刀
Ladder-绞刀桥架 mud pump-泥泵 primary spud-主定位桩
Auxiliary spud-辅定位桩 pipeline-吸泥管
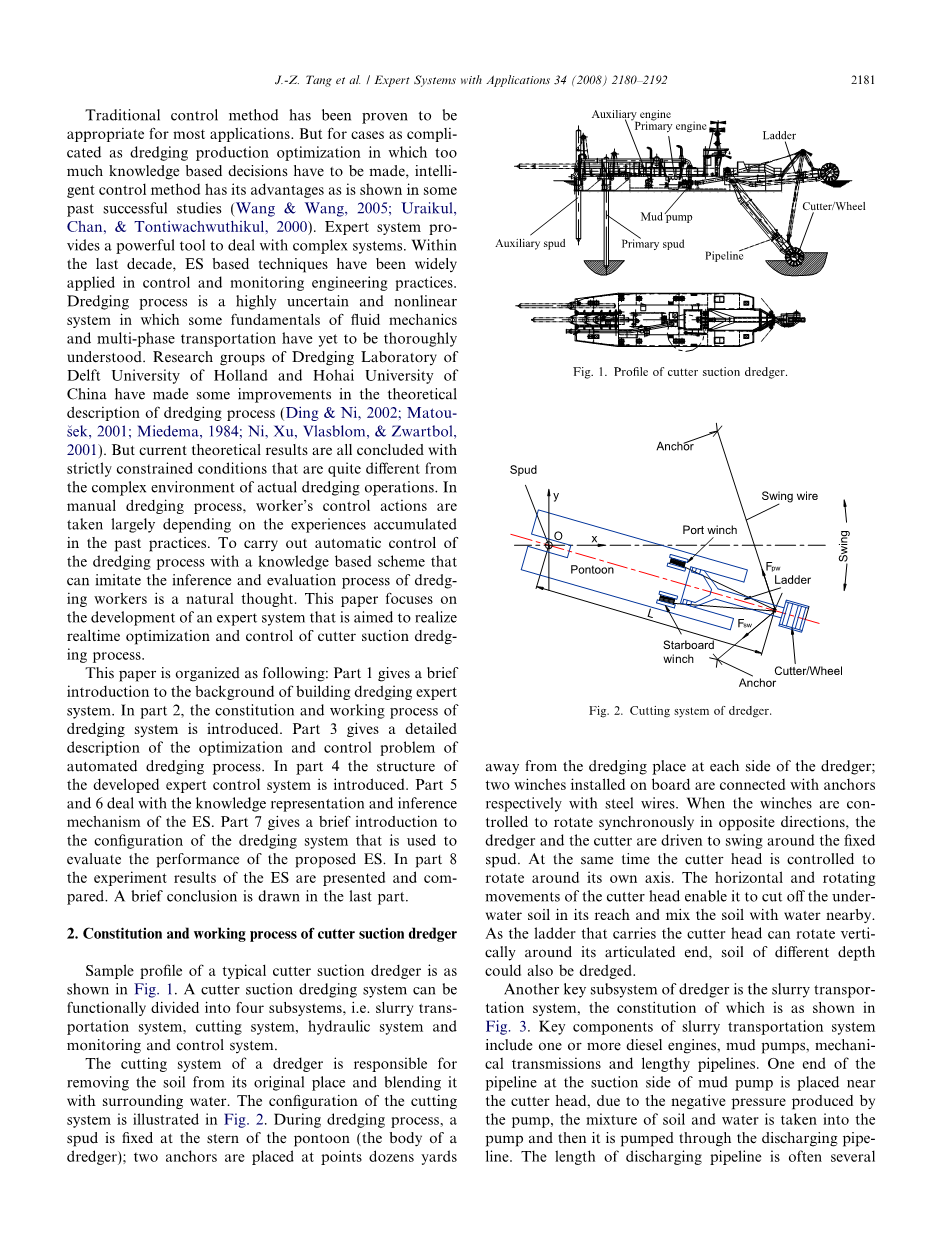
挖泥船的切割系统是负责从原来的地方去除土壤并且和周围的水进行混合。该切割系统的结构示意图如图2所示。在清淤过程中,将定位桩固定在浮桥的尾部(挖泥船的船体);两个锚被放置在挖泥船的两侧,距离挖泥船数十公里的地方;安装在甲板上的两个绞车分别用钢丝与锚连接。当绞车被控制成在相反的方向同步旋转时,挖泥船和绞刀被驱动在固定的定位桩左右摆动。同时绞刀头被控制着围绕其自身轴线旋转。绞刀头的水平和旋转运动使其能够切断覆盖在水下的土壤并且与附近的水进行混合。绞刀桥架带动绞刀头绕其铰接端垂直旋转,因此不同深度的土壤也可被挖去。
spud-定位桩 anchor-锚 swing wire-缆绳 port winch-左舷绞车
Starboard winch-右舷绞车 pontoon-浮桥 cutter -绞刀
挖泥船的另一个关键子系统是浆料输送系统,其构成如图3所示。 浆液运输系统的关键组件包括一个或多个柴油机、泥泵、机械传动装置和冗长的管道。吸泥管道被放置在泥浆泵的吸入侧一端的绞刀头附近,由于吸泥泵产生的负压,土壤和水的混合物被吸取入到泵里,然后经由排出管道泵出。排泥管道的长度通常有几英里长。在操作过程中收集污泥的地方一般远离挖泥的地方,并且安装了多台水泵和发动机。
flow rate meter-流量计 concentration meter-浓度计
discharging pipeline-排泥管道 diesel engine -主机
mechanical transmission- 机械传动 suction pipeline-吸泥管道
mud pump- 泥泵
疏浚环境是高度不确定和不可控的。石块,草根和其他一些材料被往往切断,通过管道被输送(见图4)。绞刀和输送系统很可能出现严重故障,尤其在不恰当的控制流程中会发生。清淤系统的的大部分故障是泥浆输送系统的故障。通常情况下,泵的堵塞和管道堵塞是最有可能发生的,因此故障检测和故障处理在疏浚作业中至关重要。
Materials cut off-被切碎的材料 surroundings-清淤环境
疏浚操作是一个多执行器同时动作的复杂过程。为了确保得到令人满意的疏浚作业性能,必须实现对所有子系统的协调控制。为了实现自动疏浚过程,建议使用如图5所示的层次结构的控制系统。每个驱动器均对应一个控制器,所有的控制器是由上层优化和控制系统来协调。上层的优化和控制系统负责监测和评估疏浚过程的状态,并且它也决定子系统的控制动作。最好的优化和控制系统是一个可以有效地将人工疏浚操作过程中积累的知识运用到自动控制疏浚过程的智能单元。提高和自我完善这样一个单元必将有利于优化和控制。开展评估和优化任务时,必须掌握疏浚作业实时控制的知识。本文所提出的基于专家系统的控制方案的假设,表1中所示的数据可从疏浚过程实时获得。
|
表一:清淤过程中获得的实时数据 |
|||
|
序号 |
数据 |
传感器/设备 |
备注 |
|
1 |
清淤地点 |
全球卫星定位系统 |
|
|
2 |
摆角 |
陀螺仪 |
|
|
3 |
旋转速度 |
速度传感器 |
|
|
4 |
桥架位置 |
角度传感器 |
|
|
5 |
切割速度 |
速度传感器 |
也可以通过液压泵的流量来计算 |
|
6 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[147634],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
|||



