智能船舶推进技术的信息技术外文翻译资料
2022-07-26 20:53:34

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
智能船舶推进技术的信息技术
抽象概念:电力推进的概念不是新的,他已经在19世纪末进行了测试。在20世纪20年代早期,只有少数民用跨大西洋船舶实施了电气轴概念。另一方面,到那时他将会被广泛应用于潜艇和战舰(田纳西级战舰),这种新技术的优点,如可逆转,安静的工作和强大的机动性是海军船只的理想选择。自那时以来,电力推进技术不断发展,但主要集中于军事用途,偶尔运用于商业船只,但更多是作为例外而不是广泛运用,二十世纪80年代和90年代初是电力推进最终进入商业市场的时候。当时,集成电力推进(IEP)概念诞生了,并成为下一代海军和商业船舶概念,如全电力船(AES)和智能船舶的基础。本文的目的是提供智能船舶推进系统背后的信息和电子技术,以及他们未来的发展。
- 介绍:每个电力推进系统的基础是驱动电动机。这些机器的工作理论或多或少的得到了充分发展。当前电气和机械特性的改进主要与新材料和构造技术的发展相关。永磁转子(PM)电机和高温半导体(HTS)电机是未来船舶推进驱动元件最具希望的新技术。电动机,无论其多么先进,在没有完全得到开发的可靠的实时速度和力矩调节的情况下都不能满足现代IEP系统的需求。对于额定功率为10和超过兆瓦的变速电动机的开发是不可能完成的,直到能够切换高电压和高电流的半导体功率器件开发出来。当大功率半导体在大规模商业应用中变得可用时,该技术发现了其进入工业领域的方法,使得变速驱动器(VSD)广泛运用。 VSD技术发展非常快,到了20世纪80年代初,该技术准备考虑在船舶推进系统内部实施。到那时,已经构造了具有第一个thzristor的静态变频器和循环换流器。与同步电机相结合,它们提供了出色的转矩控制能力和动力传输特性。第一艘配备VSD柴油电力推进系统的船是伊丽莎白二世巡洋舰。在重建期间现代柴油推进技术替代旧的蒸汽涡轮机,与传统的推进系统相比(当时主要是柴油发动机),新系统具有许多优势,很快,它几乎成为巡航,DP和离岸船舶的标准选择。启用这种快速开发高效IEP系统的其他两种技术是信息和数字计算机技术。没有微处理器(当时仍然具有与我们现在的微控制器相比非常低的能力),对于在现代IEP系统中使用的VSD开发有效的控制算法将是不可能的。从早期开始到今天,在VSD和IEP系统领域有近30年的持续发展,并且仍有很多改进的余地。在此期间,许多有前景的新技术进入商业市场,只是等待在未来的IEP系统中实施。作者将根据当前情况和个人经验,尝试表达他们对智能船舶推进系统的IE技术的未来发展和实施的看法。
- IEP系统: 我们今天在民船和战舰上使用的完全集成电气系统遵循相同的基本平台。 当然,在配套设备和子系统方面有很多不同,这取决于船舶的主要目的。 IEP的期望是追求更好的生产力,减少长期维护和开发成本,性能改进和更低的气体排放。 为了实现这些目标,在整个设计和开发周期期间的系统工程方法是必要的。 重点必须是在整合过程中不同技术发挥的的最佳可能协同作用。 从集成的角度来看,有必要在不同领域内其技术得到充分发展,例如:
1生产和分配电能
2 自动化和控制
3测量和传感器
4通信
5信息技术
如果没有这些技术,尤其是IT和模拟方法 ,将很难实现设计下一代IEP系统的目标,以满足 AES和智能船舶概念。
- IEP中的电力产品
IEP系统中的VSD的效率是最重要的。 在VSD中建立的固态装置(SSD)的损失在导通和换向过程期间必须尽可能小。 功率转换器内部的半导体器件通常作为开关操作。 当半导体作为开关操作时,可以以最小的损失将高功率输送到负载。 即使很小,这些损失也不能忽视,特别是当在密闭环境例如船舶中使用时,VSD的发热和尺寸起重要作用。 使得可能构造适于在船上使用的VSD的第一部件是可控硅或SCR(硅控整流器)。 它是由通用电气公司于1957年发明的。
使用晶闸管并引导了IEP系统的开发的第一个变速器是循环变流器。 循环换流器是SCR转换器系统,其将固定频率的固定电压输入转换成单级中的可变频率可变电压输出,而不需要DC链路,并且可以用于为同步或异步电动机供电。 在IEP应用中,它总是与交流同步电机一起使用。 它们仍然是在低速需求下具有高扭矩的理想应用选择。
慢慢地,循环变换器被同步转换器代替,但主要集中在大型游轮上。 它们的特征在于DC链路,其通过二极管整流器从电力系统馈送。 DC链路电感器L用于平滑直流电流。 机器侧转换器(输出侧转换器)通常在反转模式下操作。 变换器晶闸管通过同步电动机感应电压换向[4]。
即使它们仍然不工作,PM电机肯定会作为未来IEP系统的驱动因素。 稀土磁体如NdFeB(钕,铁和硼合金)的价格低得足以被考虑用于商业应用。
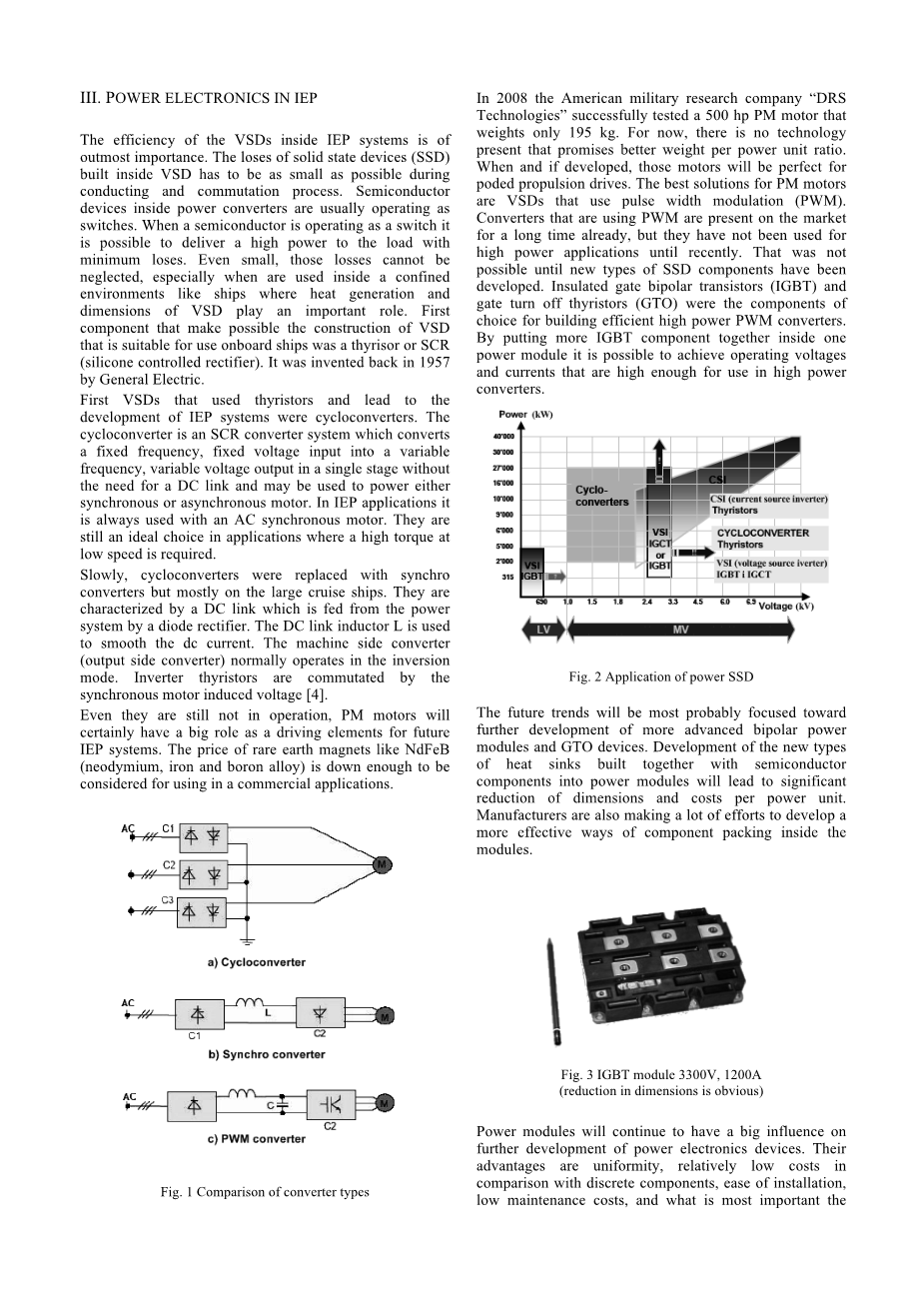
2008年,美国军事研究公司“DRS技术”成功测试了一台重量仅195公斤的500马力PM电机。 现在,没有技术提出,承诺更好的重量每功率单位比。 如果开发,这些电机将是完美的poded推进驱动器。 PM电机的最佳解决方案是使用脉宽调制(PWM)的VSD。 使用PWM的转换器已经在市场上出现了很长时间,但是直到最近,它们还没有用于高功率应用。 这是不可能的,直到已经开发新类型的SSD组件。 绝缘栅双极晶体管(IGBT)和栅极截止晶闸管(GTO)是构建高效率大功率PWM转换器的首选组件。 通过将更多的IGBT组件放在一个功率模块内,可以实现足够高以用于高功率转换器的工作电压和电流。
未来趋势将最有可能集中于进一步开发更先进的双极功率模块和GTO设备。 与半导体元件一起构成功率模块的新型散热器的开发将导致尺寸和每个功率单元的成本显着降低。 制造商还正在做很多努力来开发更有效的组件在模块内部的包装。
电源模块将继续对电力电子设备的进一步发展产生巨大影响。 它们的优点是均匀性,与分立元件相比成本相对较低,易于安装,维护成本低,而且最重要的是什么更容易诊断。随着时间的推移,可以预期新的智能SSD组件将可用。 这将导致复杂的功率模块的发展,其中智能SSD组件将与控制逻辑集成电路封装在一起。 这可以减少转换器内部的尺寸和元件数量,进一步提高可靠性。
存在另一种类型的半导体器件,由于其在功率应用中的巨大潜力,应该被提及。 那些是SIT设备。 SIT表示静电感应晶体管/晶闸管。 这些器件是由日本科学家Nishizawa博士于1975年发明的,发明了PIN二极管。 与其他半导体相比,SIT器件在导通时具有极低的电压降,极高的开关频率和更好的辐射电阻。
SIT可以在100kHz下以100kW的功率工作; 在3GHz下高于150W。 使用SIT设备构建的功率模块可以在电力电子技术成为商业可用时带来新的革命[3]。
- 推进控制系统中的信息技术
现代船舶通常在控制和自动化系统的内部具有更多的系统功能。 控制系统的典型配置包括:
- 操作员通过人机界面(HMI)与自动化系统的用户界面,
- 具有可扩展处理能力和I / O能力的集中式计算机
- 分布式计算机或PLC通常具有本地控制和与处理和集中式计算机的接口。
- 通信总线对于不同级别的控制能力
- 关联电缆
自动化系统设计师面临的最大挑战之一是网络架构布局。 在设计期间,需要确定在网络中必须创建多少个本地环,以及在每个环上应使用多少个处理器[1,8]。
通过分析信号的数量和周期性,设计人员可以预测每个的带宽利用率
环(也称为子网)。 对于小系统,这可以手动完成。 为了设计更大的系统,需要更复杂的软件设计工具,以便基于特定标准优化网络连接。
基于网络协议的物理集成允许自动化控制系统的分层布局组织。 层级中的层数根据容器要求而变化,但是自动化系统通常配置有3个网络层(图5)。 现场总线网络层实时用于设备和控制器之间的通信。 控制网络层连接控制器和操作员站,办公室工厂网络连接各种办公系统和信息管理系统。 最后一层开放卫星通信到陆地办公室,维护团队等。
很可能IEP系统和子系统中的网络基础设施将完全切换到光纤。 光学组件的价格下降到对其使用的经济理由不再有问题的水平。 由于电磁抗扰性和高带宽,光电子器件是电推进系统的理想选择。 例如,在美国实现的“智能船舶”程序需要光纤光纤网络来连接集成导航,信息和船舶控制系统中的所有子系统。
具有高速度和带宽的这些高级网络基础设施是实现作为控制系统基础设施的一部分的嵌入式系统的前提条件。 嵌入式系统(图5)是被设计为执行一个或几个专用功能(通常具有实时计算约束)的专用计算机系统。 它通常作为包括硬件和机械部件的完整设备的一部分嵌入。 相反,诸如个人计算机的通用计算机可以根据编程来执行许多不同的任务。 嵌入式系统控制当今使用的许多常见设备。
它们必须被设计成在没有人类干预的情况下工作,并且对事件具有实时响应。 随着嵌入式微处理器的计算能力的增加,越来越多的中级和高级处理可以通过ES在较低的伺服或组件级别上进行。
通过该方法,每个子系统可以被实现为由通过网络连接的多个计算节点组成的独立自主控制系统。
为了完全支持基于ES的智能控制系统,有必要提供关于IEP所需的各种资源的所有信息,以便满足船只任务的要求。 这些信息由传感器提供。 由于IEP系统内的VSD的快速实时控制算法需要每个时刻的过程的精确信息,因此显然传感器是智能船舶推进系统的最关键部件。
“智能传感器”技术(图6)与嵌入式系统一起成为未来智能控制系统(ICS)平台的理想基地。 基于模糊逻辑的组件和使用高级随机控制算法也可以在ICS开发中作出重要贡献。
- 智能船舶推进系统信息技术
作为IEP系统本身的一部分的计算设备和信息技术的使用已经在前面的章节中讨论过。
如今,推进系统的信息技术的主要应用在于设计,仿真,测试和状态监测。 现在我们在每个工程师的桌面上都有PC,仿真已经成为一个常用工具。 许多工程师将编写一个自定义程序来模拟他们的产品的行为,或使用现成的工具。 例如,设计自动驾驶仪控制算法的控制工程师很可能在MATLAB中模拟它,或者使用一个自定义C程序,比在他的PC上的真实系统运行得快得多。
当考虑用于智能船舶平台的IEP时,功率的控制和管理是需要解决的关键问题,以便确定最佳可能的系统拓扑,控制和操作模式。 研究电力系统作为整体而不是研究部件水平的重要性需要开发的电动船舶推进系统的模型。 该模型允许我们模拟真实的操作情景,从而提供在规定条件下电力系统性能的评估。 计算机模拟是在计算机上模拟现实生活或假设情况的尝试,以便可以研究该系统如何工作。 通过改变变量,可以对系统的行为做出预测。
最适用于推进系统的模拟方法是硬件在循环(HIL)。 硬件在环(HIL)仿真是一种用于开发和测试复杂实时系统的技术。 HIL模拟通过将受控制的工厂的复杂性添加到测试平台提供了有效的平台。 受控植物的复杂性包括在测试和开发中,通过添加所有相关动态系统的数学表示。 这些数学表示被称为工厂模拟。
典型的HIL系统(图7)由以下部件组成:
- 工厂的数学模型
- 传感器模型
- 执行器模型
- 具有I / O的实时目标计算机
- 实际或模拟负载
- 故障插入继电器矩阵
- 具有用于分析模拟数据的图形用户界面(GUI)应用的主计算机
使用HIL,可以在实际工作环境中测试IEP的每个组件,而不会使昂贵的系统处于危险中。
最近,挪威公司“Marine Cybernetics AS”开始对新建筑进行成功的HIL测试,这些结果被船级社接受。 为此,与NTNU一起开发了一种新的“网络海”模拟器。 可以预期,越来越多的第三方公司将开始提供HIL测试服务。
AES概念船上的推进系统对设计和运营团队以及许多学科提出了非凡的要求。 该系统包括在许多子系统上,每个子系统可以包含显着的非线性和开关元件,并且跨越许多不同的时间尺度。 为此,开发了更复杂的随机模拟方法,其中统计量比选择的常规蒙特卡罗技术更直接地计算,使得以最小计算费用获得最大信息。
信息技术具有关键作用的另一个非常重要的问题是IEP工厂的状况监测。 状态监测(图8)是监测机械中的状况参数的过程,使得显着变化指示发生故障。 它是预测维护的主要组成部分。 使用条件监控允许在故障发生之前调度维护,或采取其他措施来避免故障的后果。 然而,必须发生与参考值的偏差(例如温度或振动行为)以识别阻碍损坏。 预测性维护不预测故障; 它只帮助预测失败的时间。 故障已经开始,CM系统只能测量条件的恶化情况。 它通常比允许机械故障更节省成本。
在如智能船舶推进系统这样复杂的环境中,这从经济和维护的角度来看是非常重要的。
互联网技术也是智能船舶平台上非常重要的。 它用于高级后勤和维护支持以及状态监测和自动化商店库存。 这样做的直接好处是瞬间意识到备件的备件和设备的状态,允许岸上的支持团队及时作出反应。
- 智能船舶电子信息系统遇到的挑战
智能船舶推进系统背后的电子信息技术达到成熟期。 在近30年的开发阶段,通过对智能船舶电力推进系统及其对海运业的影响进行了大量研究和分析。 IEP船舶的设计平均寿命约为20年。 这20年代表从EI技术的角度来看, 基于这些技术的新技术和组件之间的循环越来越短, 相信这些趋势将会持续朝着同一个方向发展 。
通常情况下,旧技术的淘汰,有利于新技术的发展。 这特别涉及由另一供应商为IEP系统的原始制造商制造的系统组件,如
全文共7073字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144516],资料为PDF文档或Word文档,PDF文档可免费转换为Word



