水下拖曳系统电气控制设计毕业论文
2021-03-15 20:33:42
摘 要
水下拖曳系统是一种可以用于海洋监测的水下环境动态监测系统,它在海洋、湖泊和内河水下环境监测以及水工结构检查、海洋资源调差、水下试验、一些导弹舰艇的发射等方面有着特殊的用途。而水下拖曳系统的在水下工作的话,它的工作性质则要求拖曳体在工作时姿态稳定,并且具有快速运行的姿态和深度调节、水下视频照明以及控制能力,据此我在这篇论文中对一个拖曳系统进行电气控制设计。
本文由这个拖曳系统入手,从原理到运行方式,从选材到设计,从软件到硬件等各个方面,从微小处做起,面面俱到,对这个拖曳系统进行电气控制设计。先通过所需要的尺寸用途对硬件方面进行设计;其次,由于软件方面必须得经过试验计算得出最合适的型号类型,得出类型之后通过对其每个方面的分析,推出该器件的接法、尺寸以及放置的位置,在经过在箱子里面进行摆放之后,从而计算出箱子的大小以及箱子表面接插件以及填料函的大小;在进行了所必要的准备工作之后,根据原理图以及系统工作原理设计出意图切实可行的PLC程序,使得我们这个拖曳系统能确实有效的进行所必需的流程,设计出程序之后,在实验室的PLC上先进行调试,修改完善之后,设计的程序也就没问题。
关键词:拖曳系统;电气控制;选型设计;软件编程
Abstract
The underwater towing system is a dynamic monitoring system for underwater environments that can be used for marine monitoring. It is monitored by oceans, lakes and inland water environments, as well as hydraulic structure inspections, marine resource adjustment, underwater tests, some missile ships Launch and so has a special purpose. And the underwater towing system in the water under the work, then its nature of the work required to drag the body in the work attitude and stability, and has a fast running posture and depth adjustment, underwater video lighting and control, so I am in this In this paper, a drag control system for electrical control design.
This article from the drag system to start, from the principle to the mode of operation, from the selection to design, from software to hardware and other aspects, starting from a small place, exhaustive, the drag system for electrical control design. First through the required size of the use of hardware design; Second, the software must be tested to get the most appropriate type of model, after the type of analysis through each of its aspects, the introduction of the device connection The size of the box and the size of the box surface and the size of the stuffing box; after the necessary preparatory work, according to the schematic diagram and the system work, after the installation of the box, The principle of the design of practical PLC program, making our drag the system can really carry out the necessary process, the design of the program, the first in the laboratory PLC debugging, modify the perfect, the design process is also perfect.
Key Words:Towing system; electrical control; selection design; software programming
第1章 绪论
21世纪以来,随着陆地上的资源被大量开发,人们开始把眼光看向海洋。海洋大约占地球表面积的三分之二,海底蕴藏丰富的矿产和石油资源,在军事上也具有重要的战略意义,所以海洋成为了各个国家关注和争夺的热点。根据资料表明,目前世界上海洋经济约占国民经济的 4%左右,也就是说人类对海洋资源的勘探开发还停留在表面阶段。在海洋的开发和利用过程中,人们遇到了一些限制因素,比如复杂多变的海洋环境和科技水平的限制。在 20 世纪 90 年代初,美国认为:海洋是全球仅剩的开辟领域,随后日本、澳大利亚和加拿大等经济强国都在海洋技术上加大了投入和发展。我国是一个海洋大国,海洋国土面积多达 300 万平方公里。但是,因为一些历史和现实的原因,在属于我国的海洋领域内大约一半存在争议,这些损害我国海洋权益的行为有:海洋资源被他国开发,领域内岛屿被他国占领。因此,我国必须大力发展海洋科技、经济,加大这方面的投入。
随着现在快速发展的科学技术,人类对深海资源的勘测和开发工作正在积极的进行中。但由于现在科技的局限性,目前的水下探测技术主要有两种:一是水下航行器(即水下机器人);二是水下拖曳系统。水下航行器的发展较早,种类众多,用途广泛,大致分为无人潜水器和载人潜水器,无人水下潜器又可以分为无人遥控潜水器(Remote Operated Vehicle, ROV)和自治无人潜水器(Autonomous Underwater Vehicle, AUV)。但是,在大多数海洋科考和国防中,水下拖曳系统仍然是很重要的技术手段。
1.1概述
1.1.1水下拖曳系统的介绍
水下拖曳系统是一种广泛应用于海洋监测的水下环境动态监测系统,它在海洋、湖泊和内河水下环境监测以及水下工程结构检查、海洋资源调查中有着特殊的用途。系统通常由拖船、拖曳电缆、拖曳体以及轨迹与姿态控制机构组成,拖曳体内可根据不同的需要搭载温度、盐度、压力等各种海洋元素探测传感器或声纳、光学摄像头等声、光物理探测传感器。拖曳体的深度和姿态控制可以通过改变拖曳船速度、收放缆绳、改变拖曳体迫沉水翼攻角和控制螺旋桨转速等方式来实现。但是随着世界各国对水下环境快速现场监测能力要求的提高,市场对该类装置的需求不断增加。因此开发出一种灵活好用并且经济适用的水下拖曳平台则是我们现阶段应该要做的事情。
1.1.2水下拖曳系统的主要特点
而相对于水下机器人来说,拖曳系统则具有以下特点:1、水下拖曳系统的拖曳体结构比较简单,可维护性高。很多拖曳体仅仅由一个鱼雷状装置组成,内部放置了各种传感器、声纳或者高级摄镜头等装置。这样的话,拖曳体在作业的时候不容易损坏,并且如果出现故障的时候,也很容易维修更换。2、水下拖曳系统工作范围广,时间长,效率高。在不了解海洋地貌的情况下,一般首先会选择水下拖曳系统对地貌、水文等情况进行探测。由于水下拖曳系统的动力是拖船,整个系统可以进行长时间的工作。3、水下拖曳系统容易控制。水下机器人在设计时一般都预先输入任务程序,入水后只能根据程序进行工作;而水下拖曳体的运动可以受人为控制,可以根据水下实际情况控制拖曳体的速度、转向、升沉等运动情况。
1.2 功能要求
1.2.1 控制系统的主要功能:
a) 能够控制吊架装置,完成姿态模拟系统平台及水下移动平台吊装入水和出水功能;
b) 实现姿态模拟平台与水下移动平台的对接锁紧及解锁脱离控制功能;
c) 实现水下液压驱动系统的启停功能;
d) 控制姿态模拟系统,提供不同的横倾、纵倾和回转,以模拟被试对象不同姿态和水流方向;
e) 拖曳水下移动平台到不同的速度来实现水流效应的模拟;
f) 实现对试验平台运行状态数据采集、记录、显示、安全报警等功能;
g) 具备对被试对象的水下试验过程的操纵控制、数据采集、数据记录、数据显示、安全报警等功能;
h)具备对水下吊装、对接、锁紧、解锁、脱离、姿态模拟调整、被试对象控制等动作过程的视频监视功能。
1.2.2 拖曳系统的主要的技术指标
(1)环境条件
a) 水面设备环境温度:-10℃~45℃;
b) 水面设备环境温度:不大于95%,无凝露;
c) 水下设备环境温度:-10℃~45℃;
d) 水下设备工作水深:不大于30米。
(2)控制系统主要指标要求如下:
a) 控制系统的运行控制延迟不大于50毫秒;
b) 拖曳速度应能够在0~2.07米/秒之间连续可控,其速度控制精度不大于5%,最大拖曳速度不小于2.07米/秒;
c) 拖曳加速度应能够在0~0.30米/秒2之间连续可控;
d) 纵倾调节范围:0°~20°;调节速度可调,从0°~20°的调节时间不大于40秒,定位精度±1.0°;
e) 横倾调节范围:-45°~ 45°;调节速度可调,从0°~45°的调节时间不大于90秒,定位精度±1.0°;
f) 回转调节范围:±180°;调节速度可调,从0°~180°的调节时间不大于300秒,定位精度±1.0°;
g) 在最大载荷条件和最大拖曳速度条件下,匀速运行距离应不小于25米;
h) 水下移动平台的运行速度、位移以及姿态模拟平台的纵倾、横倾和回转等关键运动参数,测量精度不大于2%。
1.3 论文主要研究的内容以及目的
多用途水下拖曳试验平台是为搭载规定的被试对象,为被试对象提供不同姿态、不同方向水流和流速的模拟,完成被试对象进行规定试验的试验装置。因此为实现其各项功能,研制方负责完成试验平台控制系统相关设备的计算、设计、选型、研制以及调试、试验,确保达到试验的各项技术指标。所以我主要是从如下的几个方面进行研究:
- 根据各个单元的功能、用途、实验环境进行所有硬件材料方面的选型,从而达到能使实验长久持续进行下去的条件。
- 根据各单元的功能要求的不同,在每个单元的需求下进行每个单元以及模块的电气设计,从而保证能在试验中取得最好的实验结果。
- 通过监控台、水下控制采集单元、吊放单元以及被试对象控制单元的功能和要求的不同,分别对PLC进行不同的编程设计使其能达到所需要求。
第2章 水下拖曳系统的主要系统方案
2.1 系统的功能及组成
2.1.1 单元结构
多用途水下拖曳试验平台控制系统能够控制吊架装置,实现姿态模拟系统平台及水下移动平台吊装入水和出水功能,实现姿态模拟平台与水下移动平台的对接锁紧及解锁脱离功能;能够控制液压泵接触器通断,实现水下液压驱动系统的启停;能够控制姿态调节比例阀,实现被试对象横倾、纵倾和回转等姿态参数的调节功能;能够控制复位绞车及牵引绞车的配合收放缆,实现水下移动平台沿水下轨道做加速、匀速、减速及制动;能够采集水下摄像装置视频信号,实现试验平台关键环节的实时视频监视功能;具备水上水下动力及通信通道,能够实时采集水下拖曳试验平台各传感器信号,实现水下拖曳试验平台状态参数的曲线显示、存储、回放及导出功能。
多用途水下拖曳试验平台控制系统按照系统功能可分为6大部分:综合监控单元、吊放控制单元、绞车控制单元、姿态模拟控制单元、水下配电及液压单元、被试对象单元和视频监控单元组成。具体系统介绍图如下所示:
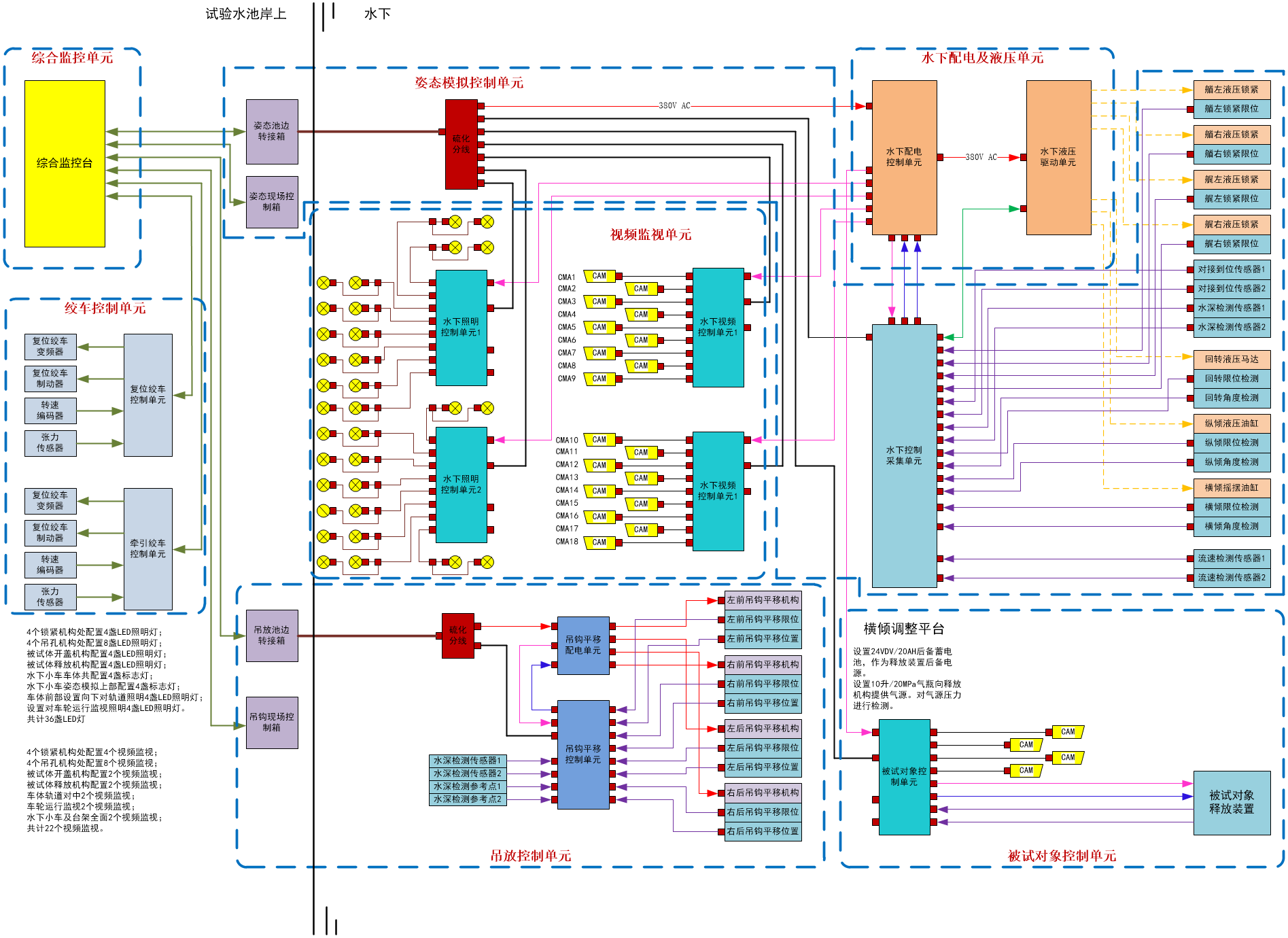
2.1.2 单元功能
水下拖曳试验平台控制系统各单元完成专项任务,确保满足控制系统的技术要求,各单元功能如下:
(1)视频监视单元完成水下吊装、对接、锁紧、解锁、脱离、姿态模拟调整、被试对象控制等动作过程的视频监视功能。



