船载水环境监测系统设计与选型毕业论文
2020-02-19 09:16:13
摘 要
我国是个典型的缺水型国家,平均每人的水资源仅仅占到了世界个人占有量的 1/4。不仅如此因为空间、时间的原因使我国的水资源的分布不均匀,并且其中有相当一部分水域受到了污染,导致水资源出现严重的短缺。我国水体被污染的特点较为突出,例如:生活污水的排放、污染物繁多、水体受污染面广等,而原有的定点监测则较为麻烦复杂、成本较高、监测范围不全面,有着较大局限性。因此本文通过设计一种无人船船载水环境监测系统,使其具有监测范围广、成本低、无人化等特点,以弥补原有技术的缺陷。
本文主要内容围绕无人船船载水环境监测系统展开,主要包括了系统的整体设计与开发;对各种水质监测参数的选择、传感器选型与调试,其中重点针对温度、pH、浊度三个参数进行了深入研究。在完成硬件选型与开发的基础上,通过LabVIEW设计了监控显示面板,具有实时接收、显示、存储和分析下位机所采集数据的功能,并能够以曲线方式显示给定时间段内水质参数的变化情况,以及当任意水质参数超出预设值时自动报警。
关键词:水环境监测;无人船;系统;LabVIEW;
Abstract
China is a typical water-deficient country, and the average person's water resources only account for 1/4 of the world's personal possession. Not only that, because of the space and time, the distribution of water resources in China is uneven, and a considerable part of the waters are polluted, resulting in a serious shortage of water resources. The characteristics of pollution of water bodies in China are more prominent, such as: discharge of domestic sewage, a large number of pollutants, and a wide range of pollution of water bodies. However, the original fixed-point monitoring is more complicated and complicated, the cost is high, and the monitoring scope is not comprehensive. limitation. Therefore, this paper designs a kind of unmanned ship shipborne water environment monitoring system, which has the characteristics of wide monitoring range, low cost and unmanned, so as to make up for the defects of the original technology.
The main content of this paper is centered on the unmanned ship shipborne water environment monitoring system, which mainly includes the overall design and development of the system; the selection of various water quality monitoring parameters, sensor selection and debugging, with emphasis on temperature, pH and turbidity. The parameters were studied in depth. Based on the hardware selection and development, the monitor display panel is designed by LabVIEW. It has the function of receiving, displaying, storing and analyzing the data collected by the lower computer in real time, and can display the water quality parameters in a given time period in a curved manner. Change, and automatically alarm when any water quality parameter exceeds the preset value.
Key words: water environment monitoring; unmanned ship; system;LabVIEW;
目 录
第一章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
1.2.1 国外发展状况 1
1.2.2 国内研究现状 2
1.3 研究内容 2
第二章 系统总体方案设计 3
2.1 系统整体设计流程 3
2.2 水环境监测下位机子系统 3
2.3 水环境监测上位机子系统 4
2.4 监测参数选择 4
2.5 系统总体结构设计 5
2.6 本章小节 6
第三章 系统硬件设计 7
3.1 传感器选型 7
3.1.1温度传感器 7
3.1.2 浊度传感器选择 9
3.1.3 pH值传感器选择 10
3.2本章小结 11
第四章 系统软件设计 12
4.1 基于 LabVIEW 的电脑客户端设计 12
4.2 LABVIEW软件介绍 12
4.3 关于 VISA的串口设计 13
4.3.1 串口初始化 14
4.3.2 与串口进行通信 14
4.3.3 关闭串口 15
4.4 数据显示面板 15
4.5 本章小结 17
第五章 系统搭建及联合调试 18
5.1 下位机数据测试 19
5.1.1下位机数据采集准确性测试方法 19
5.1.2 测试结果 20
5.2 上位机前面板系统设计检测 22
5.3 本章小结 24
第六章 结论与展望 25
参考文献 26
致谢 28
第一章 绪论
1.1 研究背景及意义
伴随着社会经济的发展,人类对水资源也造成了严重的污染和破坏,水环境的污染带来了一系列的社会现象,严重影响了人们的身体健康,降低了人们的日常生活质量,从而给社会经济带来了巨大的经济损失。而我国作为典型的缺水型国家,其状况也愈发严重。农业上化肥的过度使用,工业废水的乱排乱放,生活污水的不完善处理致使我国水体富营养化依旧十分严重,水源污染问题亟待解决。
随人们对水资源的愈发重视,如何避免水体被污染也受到大家的极大关注。水质的检测也逐渐在人们的视线中更加备受关注。环境的实时监测技术已经提上了环境保护科学的日程,然而,在水中,由于受到扩散作用的影响,污染物浓度是不断变化的,同时又受到时间、地点、气象等条件影响,人工采样的监测方法所测得的结果并不能准确反映水环境的真实情况,不能对水环境的污染现状做出准确的判断,为了能够实时监测到水环境的变化情况,第一时间做出有效的防治措施,水环境的实时动态监测技术横空出世,而无人船技术就灵活、易操作,可前往各种水域探索监测,正完美的契合其无线监测方式。
1.2 国内外研究现状
1.2.1 国外发展状况
目前现有的水质监测方法主要有两种,一种是人工采样,将采集的水样在实验室进行分析,然后做出水环境防治措施;另一种是采用定点采集水环境参数的方法,将传感器布置在水域不同监测断面,形成传感器网络,分析所采集不同位置的水环境参数,再制定防治措施。人工采集的方式费时费力,无线传感器网络虽较为方便,但也只是大概分析水环境情况,监测范围太局限。 最早将无线传感器网络应用到水环境监测中的是海网 Seaweb 项目[5-6]该项目由美国海军研究局及空海战系统中心主持,是水环境监测领域最具代表性的水下分布式监测系统,该系统采用多节点模式,将海洋中船舰传感器节点和无线浮标共同构成水环境监测网络[7]大量的监测节点能够掌握范围更大的水域水质情况,传感器与船舰的结合,满足了监测的灵活性。同时,近几年,水环境监测系统中功能进一步完善,加入了遥感、地理信息系统等技术[8-11]使水环境监测系统的性能更加优越,目前水环境在线监测系统在大部分欧美国家的使用已经相当普遍,国外主要有以下几种水环境在线监测系统[12]:全球海洋观测系统(GOOS,Global Ocean Observing System),爱尔兰的 SmartCoast 监测系统,美国的 HABSOS(Harmful Algal Blooms Observing System),澳大利亚的 LakeNET系统,美国的 EmNet 系统。[13-16]在西方发达国家的水环境监测系统中,传感器网络规模大,监测范围大,能够实现对水环境的实时监测,并且将传感器与移动设备的结合提升了监测系统的灵活性,监测范围进一步增大。
1.2.2 国内研究现状
目前,我国水环境监测领域的发展与西方发达国家还有很大的差距,许多关键技术不成熟,仍需进一步探索。国内的水环境监测方式主要有以下两种:
(1)人工采样与实验室分析相结合
根据目标水域的实际情况,选择合适的采样断面进行人工采样,将所采样本带到实验室,通过物理化学手段进行分析统计。但是人工采样与实验室分析相结合的方法缺陷众多:
① 人力财力的需求过多,成本高
② 实际监测范围的局限性
③ 分析统计周期长,实时性差,效率低下
(2)移动在线水环境监测
我国现有的移动在线水环境监测系统主要有水质监测车和水质监测船两种。水质监测船是一种载有各种监测设备的大型船舶,虽然能够实现对水环境的监测,但是体积大、成本高,只能应用于海洋和大型的湖泊、河流,对于很多位于偏远地区的小型水库、较浅的河流则不能执行任务。水质监测车虽然能够到达大部分的水域进行水样监测,但是同样具有成本高的缺点,而且水质监测车只能由工作人员在目标水域的岸边进行水样采集,所得数据并不能全面地反映目标水域的水环境情况,大大降低了采样的可靠性。
1.3 研究内容
本文主要内容介绍了无人船船载水系统的水质监测方面,主要包括了系统的整体设计与开发;对各种水质监测参数的监测与统计,其中温度、PH、浊度三个参数进行了主要的研究。对这三种参数的传感器进行了选型与调试;以Labview设计的监控显示面板,具有实时接收、显示、存储和分析下位机所采集数据的功能。能够以曲线方式显示给定时间段内水质参数的变化情况,以及当任一水质参数超出预设值时自动报警。
第二章 系统总体方案设计
2.1 系统整体设计流程
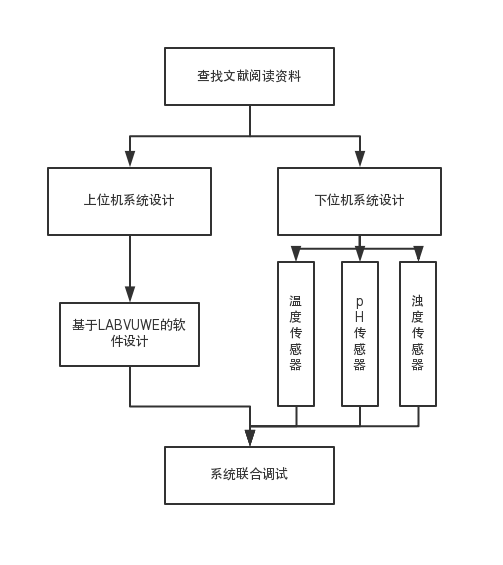
图2.1 系统设计流程图
2.2 水环境监测下位机子系统
依照我国的《水质监测规范》和《国家标准地表水环境质量标准》,水质监测的参数一般都要满足一定的检测范围和检测精度。但本论文中所检测船载水的数据多数都是变化缓慢的信号,所以对检测范围和检测精度的要求并不是太高。故本系统每秒钟采样两次。
⑴水环境监测系统需要完成对待测水环境温度、pH 值,浊度信号的实时采集;
⑵温度值、pH 值、浊度值的检测范围和检测精度要满足相应的规则标准,即:水温在0~40℃范围内达到的精度为0.1℃;pH 值在 0~14范围内达到的精度为 0.1,浊度值在 0~100 范围内达到的精度为0.1;
⑶温度值,pH 值,浊度值的采样频率为每秒采样两次。
2.3 水环境监测上位机子系统
电脑客户端作为远程数据管理终端对其的设计要求主要如下:
⑴能够正确接收下位机传输的实验数据;
⑵在显示面板上实时显示测试水环境各项水质参数当前数据及其历史曲线;
⑶在水环境参数超过报警预设值时启动报警,包括指示灯报警和声音报警;
⑷将收集到的水质参数数据自动保存至客户端;
⑸实现水质参数数据分析处理功能,显示出历史数据中最大值、最小值及截止目前的平均值,并且给出水质诊断报告。
2.4 监测参数选择
水质传感器能否快速的输出水质参数是评价系统的一个重要指标,检测数据的精度和速度都是十分重要的指标,必须要同时兼顾。而且船用传感器的要求更加苛刻,不仅要考虑到摇晃震荡造成的精度问题,而且要要注意到更换检查的问题,必须在价格价值方面跟价注重。因此,在传感器选择的时候要重点考虑水质传感器的检测精度和响应时间。水质的参数主要分为三大类,分别为化学,物理和生物三大类,其中包括:水温、pH值、COD、DO、BOD、透明度、色度、水的浊度、微量有害化学元素含量、农药及其它无机或有机化合物含量、大肠杆菌数等。但由于 COD、BOD、DO、透明度、色度、微量有害化学元素等复杂参数传感器的测量响应时间较长,影响移动监测的准确度,论文选择响应时间较短较易检测的 pH、温度、浊度三种水质参数作为检测参数。
pH(溶液氢离子浓度):溶液中氢离子含量的总数与总物质量的比值,反映所测溶液的酸碱度,用来表示水体的酸碱性、净化过程进行的程度、金属和有机物的稳定状态等。 pH 值的取值范围是 0~14 ,正常情况下,pHlt;7 时溶液呈酸性, pHgt;7 时溶液呈碱性, pH=7 时溶液呈中性。
工业现场中,pH 值的测定主要采用电位测定法,大多数应用的是玻璃电极与参比电极结合的一种复合电极,输出的电压与 pH 值具有如下线性函数关系:
E =0.1984(T 273.16)*(7-pH)
式中:T—温度,℃
温度是一种最基本也是最重要的水质参数,对水生生物的生存环境影响十分重大,很多被测参数也受温度的影响,例如温度升高时,所测 pH 值会偏低,可以通过测量所得温度,利用温度补偿的方法,代入公式中对PH值进行校正。另外,通过对温度的测量,也可以监控一定水域中的热污染。
浊度通常适用于测定天然水,饮用水和一些工业用水的水质。 由于水中含有悬浮和胶体颗粒,原始的无色透明水是混浊的,浊度称为浊度。 浊度的单位用“度”表示,相当于在1L水或Jackson中1mg SiO2(或非曲直mg粘土,硅藻土)的1浊度。 浊度是饮用水和某些优质工业用水的重要水质参数。 1976年饮用水水质标准的浊度不超过5度。
监测参数选择水质传感器是水环境监测系统获取水环境信息的源头,传感器选型的好坏将直接影响整个水环境监测系统的性能,传感器采集结果一旦有了不准确的检测或者不能正常的工作,系统就不能准确的反映出水环境的变化趋势,因此必须选择检测指标精确、灵敏度高,反应迅速的传感器。
论文所选择的三种传感器都是目前水质监测领域主流的传感器,具有成本低、应用领域广泛、测试准确等特点。
2.5 系统总体结构设计
整个系统可以分为俩个层次,一为水质传感器检测层,二为数据处理管理层。其中水质传感器监测层主要包含温度传感器、pH 值传感器,浊度值传感器,用来实现对待测水环境水质参数的检测。数据处理管理层主要是通过电脑客户端,对水质传感器检测层传输回来的数据进行整合处理后显示、存储、分析和报警。如图22
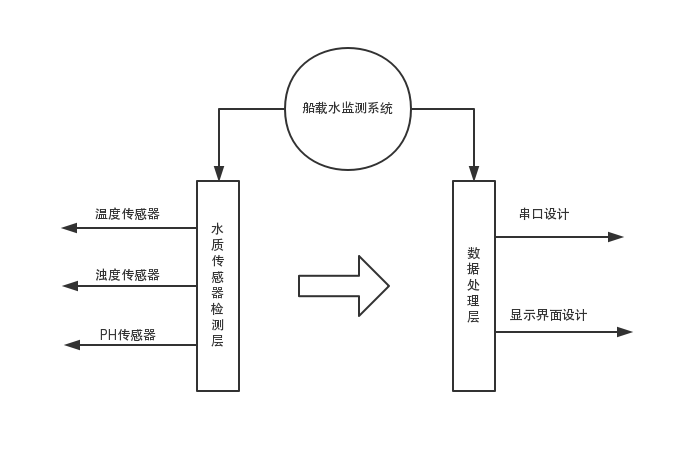
图2.2系统整体结构设计
2.6 本章小节
本章主要对论文的整体结构进行了介绍和分析,包括所设计的上位机和下位机系统的结构组成,并且对后续的监测参数选择上进行了一个具体的要求,对系统的设计组成有了一个更加明了的认识。在后续章节中我就上述两个方面对其进行详细叙述与讲解并对他们进行设计。
第三章 系统硬件设计
系统硬件的设计主要包含三种传感器的设计选型,需要针对他们不同的特点对其进行进一步的分析。每种传感器的要求都各不相同,需要尽量满足船载所需的要求,保证系统能够进行长时间平稳的运作。
3.1 传感器选型
3.1.1温度传感器
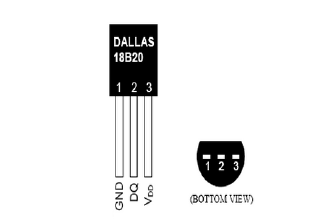
DS18B20是常用的数字温度传感器,其输出的是数字信号,具有体积小,硬件开销低,抗干扰能力强,精度高的特点。 DS18B20数字温度传感器接线方便,封装成后可应用于多种场合,如管道式,螺纹式,磁铁吸附式,不锈钢封装式,型号多种多样,有LTM8877,LTM8874等等。样式如图3.1

图3.1DS18B20数字温度传感器
DS18B20的读写时序和测温原理与DS1820相同,只是得到的温度值的位数因分辨率不同而不同,且温度转换时的延时时间由2s减为750ms。 DS18B20测温原理如图所示。图3.2中低温度系数晶振的振荡频率受温度影响很小,用于产生固定频率的脉冲信号发送给计数器1。高温度系数晶振随温度变化其振荡频率明显改变,所产生的信号作为计数器2的脉冲输入。计数器1和温度寄存器被预置在-55℃所对应的一个基数值。计数器1对低温度系数晶振产生的脉冲信号进行减法计数,当计数器1的预置值减到0时,温度寄存器的值将加1,计数器1的预置将重新被装入,计数器1重新开始对低温度系数晶振产生的脉冲信号进行计数,如此循环直到计数器2计数到0时,停止温度寄存器值的累加,此时温度寄存器中的数值即为所测温度。斜率累加器用于补偿和修正测温过程中的非线性,其输出用于修正计数器1的预置值。
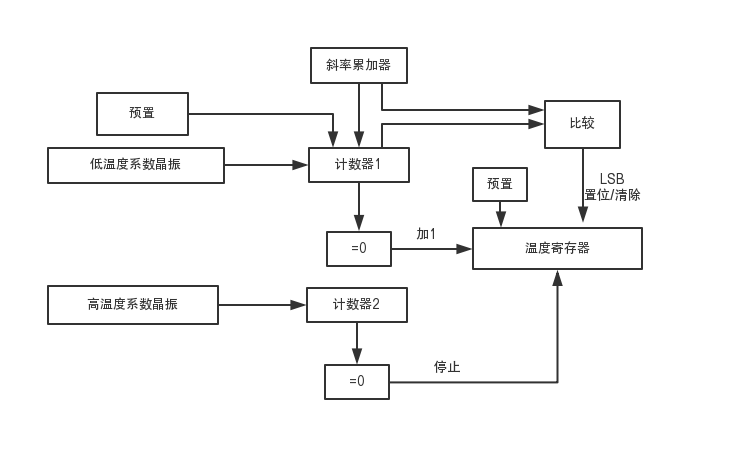
图3.2 DS18B20温度传感器原理
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: