新型船用太阳能风帆系统设计毕业论文
2020-02-19 09:16:06
摘 要
我国河流湖泊众多,正在进行旅游开发或已经完成开发的有上千个,水域旅游已经成为中国旅游业的重要组成部分。而景点中多数水域为饮用水库或水源保护地,所以如何解决在开发旅游资源的同时保护水域生态环境已成为制约当地旅游经济发展的主要矛盾。基于这种现状,本文在关注应用对象和场景研究分析基础上,提出一种新型船用太阳能风帆系统。首先根据所选目标船的特点,在外界约束情况的限制下对风帆的整体参数进行设计和评估;其次设计太阳能风帆姿态调节机构,使其不仅能够完成太阳能风帆的竖帆和平帆运动,也能够实现太阳能风帆自身的轴向旋转运动;最后设计了太阳能风帆姿态控制器及其软件,根据船舶的状态和环境参数控制风帆攻角,使其根据船舶航行状态和环境参数调整姿态。该研究将风帆助航和太阳能发电技术应用到景区游船,既可实现节能减排和绿色旅游,亦可实现水上旅游的可持续发展。
关键词:风力助航;太阳能;游船;节能减排
Abstract
There are many rivers and lakes in China, and there are thousands of tourism developments or developments that have already been completed. Water tourism has become an important part of China's tourism industry. Most of the waters in the scenic spots are drinking water banks or water source protection areas. Therefore, how to solve the problem of protecting the ecological environment of the water resources while developing tourism resources has become the main contradiction restricting the development of local tourism economy. Based on this situation, this paper proposes a new type of marine solar sail system based on the research of application objects and scenes. Firstly, according to the characteristics of the selected target ship, the overall parameters of the sail are designed and evaluated under the constraints of external constraints. Secondly, the solar sail attitude adjustment mechanism is designed to not only complete the vertical sail and sail of the solar sail, but also The axial rotation of the solar sail itself is realized. Finally, the solar sail attitude controller and its software are designed. The sail angle of attack is controlled according to the state of the ship and the environmental parameters, so that the attitude is adjusted according to the navigation state and environmental parameters of the ship. The study applies windsurfing and solar power technology to scenic cruises, which can achieve energy-saving emission reduction and green tourism, as well as sustainable development of water tourism.
Key Words:wind navigation; solar energy; cruise ship; energy saving and emission reduction
目 录
第1章 绪论 1
1.1 课题研究意义 1
1.2 国内外研究现状 1
1.3 本文主要工作 2
第2章 新型船用太阳能风帆系统总体设计 3
2.1 游船太阳能风帆需求分析 3
2.2 应用船型选择 3
第3章 风帆总体参数与姿态控制机构的设计 4
3.1 各类型风帆对比分析 4
3.2 风帆工作原理分析 5
3.3 姿态驱动机构 7
3.3.1 姿态驱动机构的功能 7
3.3.2 姿态驱动机构的组成 7
3.3.3 姿态驱动机构的设计 7
3.4 受力分析 8
3.4.1 平帆时帆底部的受力分析 8
3.4.2 竖帆时帆杆底部的受力 9
3.4.3 风阻变化仿真 10
第4章 风帆姿态控制器设计 10
4.1 控制器功能 10
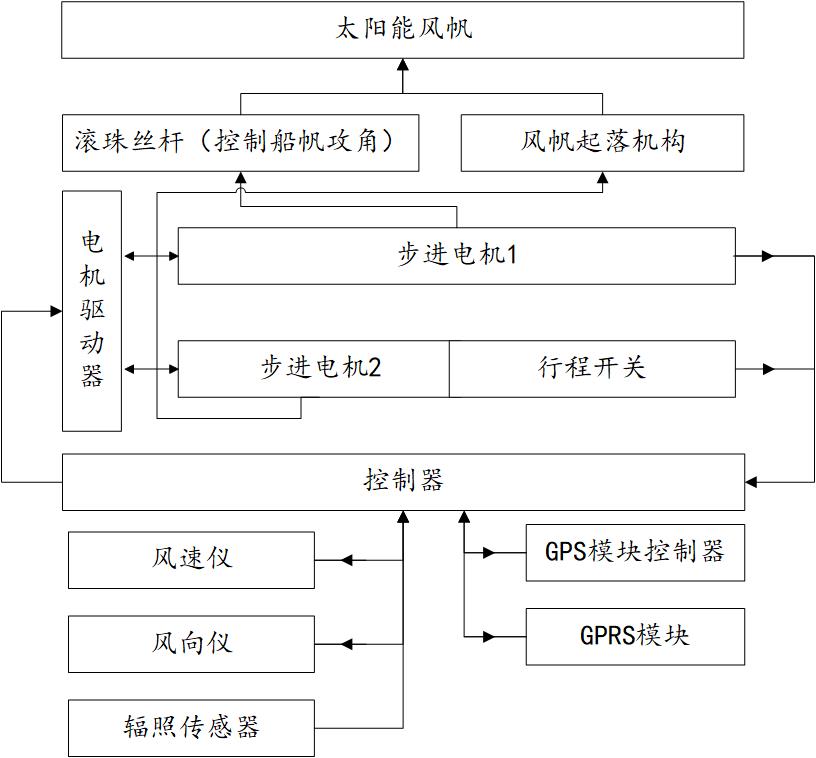
4.2 控制器的总体设计 11
4.3 控制器硬件设计 12
4.4 控制器软件设计 13
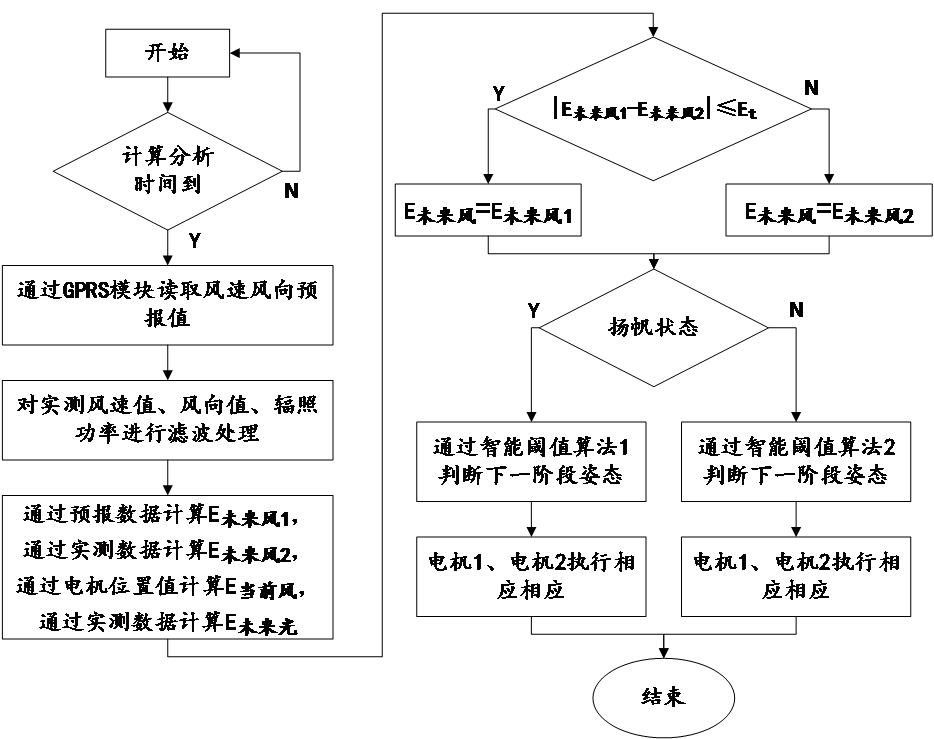
4.4.1 控制逻辑设计 13
4.4.2 阈值算法 15
第5章 太阳能风帆效益评估 17
5.1 风帆推进效率分析 17
5.2 系统发电模式效益分析 19
5.3 经济效益 21
第6章 结论与展望 22
6.1 工作总结 22
6.2 尚待解决的问题 22
致 谢 24
参考文献 25
第1章 绪论
1.1 课题研究意义
我国河流湖泊众多,其中约有2300个面积一平方千米以上,正在进行旅游开发或已经完成开发的有上千个,水域旅游已经成为中国旅游业的重要组成部分[1]。游船作为水上旅游的交通工具,也越来越受到大众的关注。然而,随着旅游业的发展,景区客流量日益增加,游船营运更频繁。而这些游船大多为油动船,即以柴油或汽油为动力,不可避免会给所在水域带来污染物排放,包括废油、废水、碳氧化合物、氮氧化合物以及硫氧化合物等有害物质。造成水域水体和大气污染,危及水域生态系统。
此外,国家“十三五”规划中明确指出优化能源结构,其中非化石能源消费比重提高15%以上。可以说,清洁低碳能源将是“十三五”期间能源供应增量的主体。因此设计和优化满足相关政策标准与行业规范要求的节能船型,实现游船的节能减排,不仅对企业产生经济效益,同时完全符合国家的总体战略,看齐国际标准与规范。在可持续发展的要求下,新能源游船及其相关产业应运而生。
1.2 国内外研究现状
目前,航运业对风能的利用主要是通过在船舶上加装风帆,借助风能为船舶提供辅助动力,从而减少能源的消耗和有害气体的排放[2]-[3]。但因能量利用面单一,续航能力较差,节能效果有待提高。近几年“EnergySail”的概念也渐渐得到推广,“太阳能风帆”得到初步应用。2010年6月日,第39个世界环境日,我国第一艘太阳能混合动力游船“尚德国盛号”在上海黄浦江畔起航[4](如图1.2)。该船首次将太阳能电力引入游船的动力,将混合动力模式引入船舶建造。德国也建造出世界上最大的完全由太阳能提供动力的船舶太阳能游艇“Turanor”号(图1.2)。
早期的研究显示加大对清洁能源的利用效率会呈现出比现存的单一太阳能模式更加优越的性能。受此启发,本文设计的新型船用智能太阳能风帆系统,可根据船舶航行状态和环境参数,自适应控制风帆攻角,通过改变风帆姿态使受照面积加大,做到风帆控制的智能化,实现风光的高效利用。该研究若能形成成果,可极大地节约游船的运营成本,从长期看有更大的经济和环境效益,符合可持续发展的理念。


图1.1太阳能游艇“Turanor”号 图1.2尚德国盛号
1.3 本文主要工作
本文针对所提出的新型船用太阳能风帆系统展开研究,重点针对叶片翼型选取、姿态驱动机构和与机构相适应的控制程序,具体研究内容包括以下方面:
(1)本文对已有风帆类型开展搜集和整理,研究其基本原理与存在的问题,并针对所选帆型的结构形式和空气动力性能等要素对比分析,根据所选目标船的特点,在外界约束情况的限制下对风帆的整体参数进行设计,为分析风帆的特性打下基础;
(2)以内河游艇为实验对象,设计太阳能风帆姿态调节机构,使其不仅能够完成太阳能风帆系统模式的改变,也能够实现太阳能风帆自身的轴向旋转运动;
(3)设计出太阳能风帆姿态控制器及其软件,根据船舶的状态和环境参数控制风帆姿态与攻角,使其根据船舶航行状态和环境参数调整姿态,以达到最高的能源利用率。
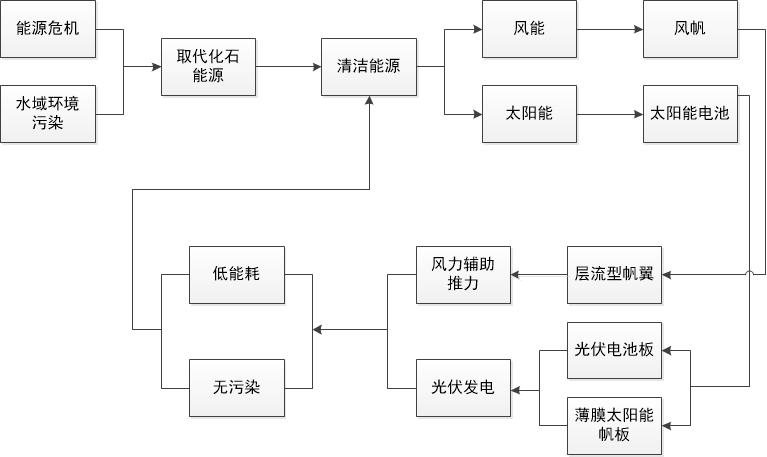
图1.3 研究思路
第2章 新型船用太阳能风帆系统总体设计
2.1 游船太阳能风帆需求分析
游览船作为一种主要用于观光的水上载具,在航速、主尺度、舒适性、环保、日运行时间等方面的要求有其特殊性,其有以下特性[5]:
(1)旅游观光目的在于欣赏沿途风景,对船舶航速要求不高;
(2)游览船在风景区域内航行,受吃水和航道等方面的限制,总体规模比较小;
(3)游览观光的乘客对船舶舒适性要求较高,特别是噪音、空气质量和横摇方面;
(4)风景区水体的环境保护要求,使得游览船在环保方面要求严格;
(5)游客通常在白天进行观光,游览船的日运行时间扣除等待时间,一般在4-6小时,日运行间较短。
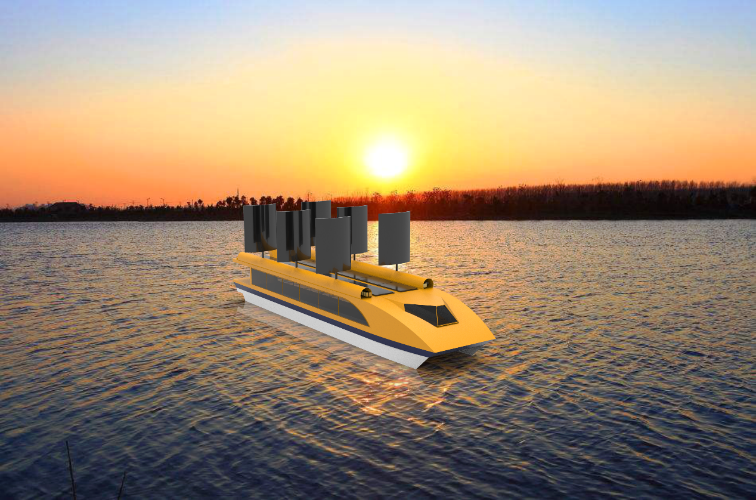
图2.1 太阳能风帆游览船场景复现图
2.2 应用船型选择
船型选择:双体船。
研究表明选用双体船有以下优点[6]:
1)顶层面积大。同样排水量的双体船顶层面积一般要比单体船大50%~60%。这符合太阳能船所需较大受光面积的需求和客船要求宽敞的需求,符合系统安装的基本条件;
2)稳性好。双体船具有较大的复原力矩,较高的初稳心高和较短的横摇周期,可满足游览船的高安全性要求。
本系统以HQ2380游船为载体,设计系统结构尺寸,船体参数见表1。
表1 HQ2380游船整体参数
船长 | 船宽 | 型深 | 片体宽 | 吃水 | 主机功率 | 最大航速 |
23.80m | 5.00m | 1.75m | 1.520m | 1.080m | 2×15kw | 12km/h |

图2.2 HQ2380太阳能游船
设计主要要求:
(1)服务航速达到9km/h;
(2)全船能量来源完全依靠太阳能光伏电池发电和蓄电池供电;
(3)船舶日运行时间至少为6小时。
2.3 风帆总体参数设计
2.3.1 各类型风帆对比分析
目前世界上风帆种类繁多。如利用马格纳斯效应提供推进力的风帆或采用翼型原理产生推进力的风帆。其中市面上利用马格纳斯效应的风帆主要为转筒帆,而使用翼型原理的风帆主要有矩形帆翼、沃克型风帆、三角帆翼、天帆等[7]。其中所属转筒帆的抽气式涡轮帆的空气动力性能最优,矩形帆翼较次,天帆最差。由于涡轮帆不仅需要提供额外的能量来驱动抽气机,降低了节能效益,而且需控制的要素较多。天帆系统制造成本过高,而且需要对其进行姿态多自由度的控制,增加了控制系统的复杂程度。相比而言,矩形帆翼的控制系统简单,消耗额外的能量较少,更适合于辅助船舶推进。
通过分析已有的风洞试验和查阅有关文献[8],在较大的攻角范围内,展弦比λ=1.45,拱度比f=0.14的硬质弧形风帆可以产生较其他帆型更大的推力,具有更好的空气动力性能。
风帆的面积和数量是相互关联的,但目前尚未有明确的风帆船的稳性规范,一般根据船舶尺度来确定风帆面积:
(式中,S为帆面积(m2);L为船长(m);B为船宽(m);C为系数;N为风帆个数。对于翼帆,系数C一般为0.3-0.6)考虑到风帆之间的干扰问题,根据相关文献分析,帆距为4时的平均最大推力系数、对应横向力系数,双帆之间的干扰确实对风帆的影响较小,由于风帆是同步转动的,在一定范围内双帆特性可看成是单帆特性的叠加[9]。本文选用双列风帆帆板布置方案,在船顶两侧对称布置6支风帆。设计参数如表2。
表2风帆的综合设计参数
帆高 | 弦长 | 展弦比 | 拱度比 | 面积 | 数量 | 系数C |
3.625m | 2.5m | 1.45 | 0.14 | 10m2 | 6 | 0.5 |
![LYJU_6_]GXQIPY@U~CQ[4CL](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw6427_20202199164147.png)
图2.3 风帆设计示意图
2.3.2 风帆工作原理分析
风帆的气动力被分解为升力L和阻力D两个分力,风力对风帆的力矩有弯矩ML,MD和扭转力矩Mz,力矩以坐标原点O为参考点,风向角α为风速矢量与帆面方向之间的角度。由于风洞试验时风向不变,而风帆模型随着转盘旋转,通过测力传感器测定模型受到的平行于风速方向的阻力和垂直于风速方向的升力。测力试验的结果一般用气动力因数CL和CD,分别为:
风能有效功率:,为游船最佳经济航速。
风帆推力:
式中为帆的最大推力系数,为风向角,为空气密度,为帆的面积,为表观风速。其中表观风速为船速Vc与真实风速Vz的矢量和(如图2.4),根据矢量三角形,由余弦定理得:
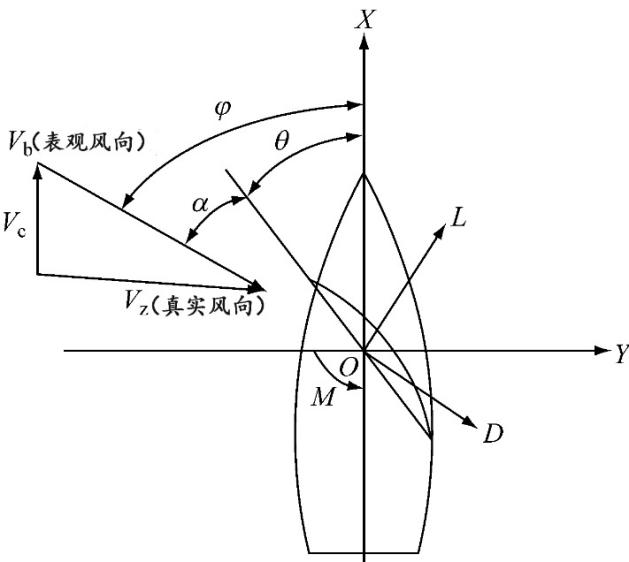
图2.4 风帆受力分析图
当帆的几何参数确定后,由风帆推进模式下受力分析可知,所获得的节能效益主要与船舶的水动力性能、风帆的空气动力性能、风向角和风速等有关[10]。帆的升力系数与阻力系数主要由攻角α决定,由于不同迎风攻角下风帆的升力系数和阻力系数都会发生改变,所以存在一个最佳风向角对应产生最大推为系数[11],因此为了使帆的推力最大,须将风帆在各个风向角下置于最佳攻角(如图2.5)。
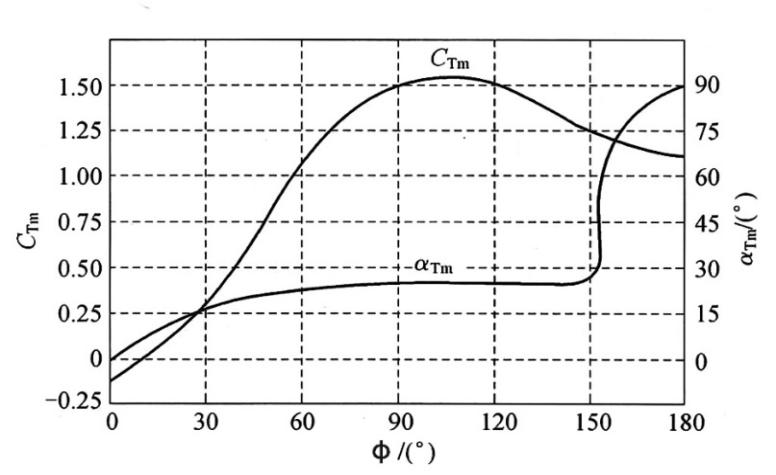
图2.5最佳帆攻角及最大帆推力系数与风向角关系曲线
所以通过测量当前的风向角、风速、辐照强度,便可通过风帆姿态控制器,智能的选择合适的姿态。
2.4 姿态驱动机构
2.4.1 姿态驱动机构的功能
姿态驱动机构与作为本文的重要组成,控制风帆攻角与姿态的转变。在接收到控制器所发出的风帆攻角改变的信号,丝杆电机转动带动与滑轨连接的齿条滑动,齿条带动齿轮发生转动,实现桅杆的轴向角度变化;在对比出风能与光能效益的大小后,电机转动带与其相连的动滚动圆筒旋转,实现风帆姿态的转换。综上,可完全达到机构的运动要求。
2.4.2 姿态驱动机构的组成
机构由风帆、丝杆滑轨、齿条、齿轮、风帆支撑桅杆、滚动圆管、伺服步进电机组成(如图2.6)。
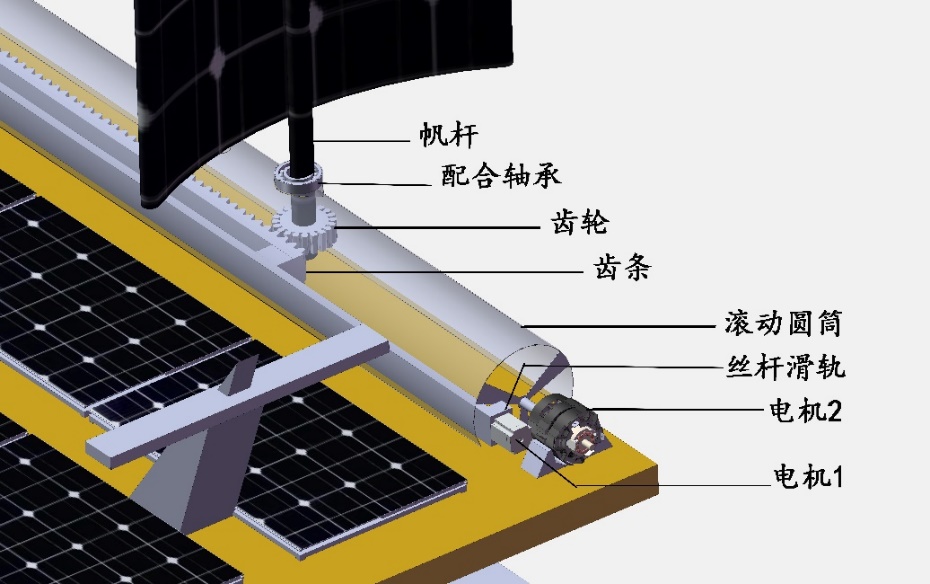
图2.6 姿态驱动机构图
2.4.3 姿态驱动机构的设计
桅杆通过轴承以过盈配合的方式内套在滚动圆管内;齿轮与桅杆通过螺纹加固并与齿条啮合;齿条固定在滑轨(丝杆电机式)上,滑轨的一端与伺服电机相连,通过电机控制齿条的移动进而控制帆翼的风向追踪;滚动圆筒内部通过焊接结构与滑轨相连,外部与船顶凹槽接触,增加运动件运行时的稳定性,最后由固定装置固定。


图2.7 太阳能风帆姿态图
第3章 受力分析
3.1平帆时帆底部的受力分析
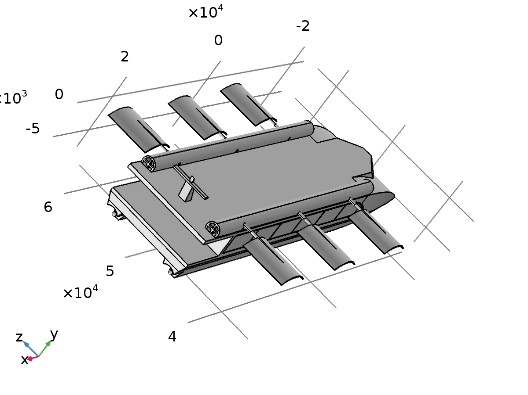
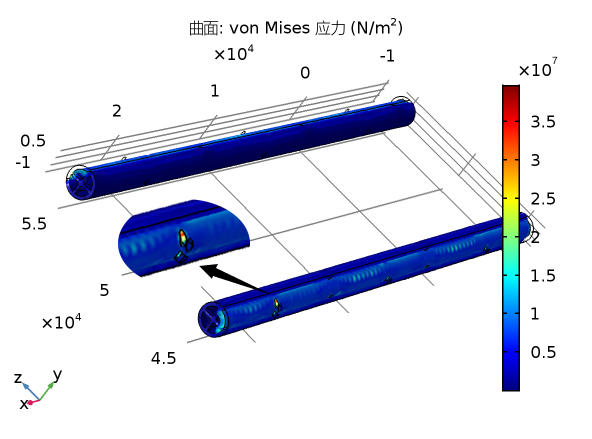
为了检验光能利用模式下帆杆底部应力集中部分的安全性,本项目通过利用COMSOL Multiphysics中的静应力分析模块,将通过SolidWorks软件建立的三维模型导入,其界面显示。如图3.1。
对其进行坐标轴的确定,并确定模型中各部分的材料从下到上分别为:船体(铝合金)、旋转圆筒(45钢)、风帆轴(铸钢)、风帆(k=铝合金),最后确定其泊松比、杨氏模量等参数。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: