绞吸式挖泥船泥浆浓度与流速控制的研究毕业论文
2020-02-19 09:06:44
摘 要
挖泥船作为现代疏浚工程中非常常用的疏浚工具,所以对于该疏浚工具的技术升级,是极为必要的,而作为挖泥船种类中最为重要的绞吸式挖泥船,其能将泥土挖掘和输送一条龙完成,因此具有非常高的工作效率同时也具有广泛的适应性,但是目前来看绞吸式挖泥船也有较多缺点,例如设备较为昂贵、工作费时等。并且在实际疏浚过程系统动态特性极其复杂,因此绞吸式挖泥船的功能优化工作就渐变得至关重要。
而输泥管道的优化方式主要从静态优化方法下手,其原理就是根据设备固定参数以及确定的数学模型,进行离线理论计算,从而确保来确定最完美的控制方式与算法,但是因为挖泥船的工作情况和环境是多变且非线性的,故此离线优化方法能力有限。
在输泥管道最重要的两个主要因素泥浆浓度与速度的控制上,针对此种现象,本文主要通过此方法能够实现作业产量和动作规划优化的在线作业方法。所以本文章主要是研究浓度与流速的控制达到较为迅捷的方法,该研究的核心包括两个方面:泥浆浓度和流速受哪些参数的影响、并且尽可能建立确定数量关系与浓度的模糊—PID控制和泥浆流速的自适应控制。泥浆的浓度主要有进口浓度和过程浓度,根据实际检测浓度影响参数和设备信息建立数学关系,泥浆的输送管道的接力泵和主泵之间受到耦合作用的影响,所以这就增加了泥浆流速控制的实际难度。
疏浚过程泥浆浓度和流速所受的各种影响因素为约束制作优化策略模型,将影响的因素转化为非线性规划,遗传算法来求解,以得到目前环境下使产量最大化的浓度和流速;对于系统控制,也就是指对浓度和流速的稳定控制,它以前文的经过算法得到浓度和流速工艺值为希望达到的数值,送到各自的控制系统,浓度控制系统采用的是模糊控制与PID控制相结合形成反应敏捷的控制器,流速控制系统采用的自适应控制。 该控制方法能够实时实时应对挖泥船所处环境的参数改变,从而在目前允许的情况下使挖泥船达到到效率最高时对应的最佳的浓度流速的控制量,传送到控制系统进行优化控制。
关键词 :绞吸式挖泥船;泥浆浓度流速;自校正控制;模糊— PID 控制
Abstract
Dredger as a very commonly used in modern dredging engineering dredging tool, so the tool for the dredging technology upgrading, it is necessary, and, as the most important of cutter-suction dredger types of dredger, it can send soil excavation and a dragon, so it is of very high work efficiency at the same time, it has extensive adaptability, but for now heave suction dredger also has many disadvantages, such as working equipment is relatively expensive, time consuming, etc. And the dynamic characteristics of the actual dredging process are extremely complex, so the function optimization of the cutter suction dredger is very important.
And dredging tube, the optimization of the way from the static optimization method, the principle is based on equipment fixed parameters and determine the mathematical model of offline calculation, thus ensuring to determine the most perfect control method and algorithm, but because of the dredger working condition and environment is variable and non-linear, therefore off-line optimization ability is limited.
In terms of the control of mud concentration and velocity, the two most important factors in the pipeline, this paper mainly USES this method to realize the online operation method of production and action planning optimization. Therefore, this paper mainly studies the method to achieve a relatively fast control of concentration and flow rate. The core of this study includes two aspects: which parameters affect mud concentration and flow rate, and establish the fuzzy - PID control to determine the relationship between quantity and concentration and the adaptive control of mud flow rate as far as possible. The mud concentration mainly includes the inlet concentration and the process concentration, and the mathematical relationship is established based on the influence parameters of the actual detected concentration and equipment information. The relay pump and the main pump of the mud conveying pipeline are affected by the coupling effect, so this increases the actual difficulty of mud flow rate control.
During the dredging process, various influencing factors of mud concentration and velocity are constrained to make an optimization strategy model. The influencing factors are converted into nonlinear programming and solved by genetic algorithm to obtain the concentration and velocity maximization of production under the current environment. For system control, is refers to the stability control of the concentration and velocity of flow, it used the algorithm to obtain concentration and velocity of flow process values for the desired value, to the respective control system, the concentration control system USES a combination of fuzzy control and PID control form responsive controller, flow rate control system adopts adaptive control. This control method can deal with the parameter change of the environment of the dredger in real time, so that the dredger can reach the optimal control quantity of concentration and velocity corresponding to the maximum efficiency under the current allowable condition, and then transfer to the control system for optimal control.
Key Words:Dredge; cutter suction dredger; Mud concentration velocity; Self-correcting control; Fuzzy - PID control。
目 录
摘 要 II
Abstract III
第一章 绪论 1
1.1课题研究背景 1
1.2绞吸式挖泥船国内外现状与发展 3
1.3研究的主要内容 4
第二章 绞吸式挖泥船原理 5
第三章 浓度及流速数学模型 8
3.1泥浆浓度数学模型 8
3.1.1吸口泥浆浓度的数学模型 8
3.1.2泥浆浓度过程的数学模型 9
3.2建立流速的数学模型 11
第四章 泥浆浓度和流速控制 14
4.1泥浆浓度的控制 14
4.1.1 PID控制原理 16
4.1.2 模糊控制基本原理 17
4.1.3模糊控制—PID控制结合 17
4.2泥浆流速控制 19
4.2.1自适应控制 19
第五章 总结与展望 23
5.1论文总结 23
5.2工作展望 24
参考文献 25
致谢 26
绪论
 在科技和互联网络的不断发展的今天,在各种社交平台上,关于南海问题的讨论也变得尤为热点。中国的天鲸号也因此进入非专业民众的谈论中。今非昔比,纵使中国在海洋事业上起步较晚,但中国近几年使用大型绞吸式挖泥船天鲸号进行高效率地运行在国内陆海洋水域,并且在短短几年的光阴内就完成了对周边列国如越南、菲律宾等国几十年的填岛成果的超越,由此可见我国挖泥船发展迅速,本文将对挖泥船的输泥管道两个重要的效率影响因素泥浆的浓度与流速展开研究。
在科技和互联网络的不断发展的今天,在各种社交平台上,关于南海问题的讨论也变得尤为热点。中国的天鲸号也因此进入非专业民众的谈论中。今非昔比,纵使中国在海洋事业上起步较晚,但中国近几年使用大型绞吸式挖泥船天鲸号进行高效率地运行在国内陆海洋水域,并且在短短几年的光阴内就完成了对周边列国如越南、菲律宾等国几十年的填岛成果的超越,由此可见我国挖泥船发展迅速,本文将对挖泥船的输泥管道两个重要的效率影响因素泥浆的浓度与流速展开研究。
图1-1 天鲸号绞吸式挖泥船
1.1课题研究背景
1895年时中国第一艘挖泥船引进于荷兰,但此时中国未有自己的挖泥船建造技术。在和早期的海洋国家相比,中国的挖泥船制造业以及疏浚业落后了至少百年之余,尽管如此国内仍然不为人后,积极科研,努力获取了重大进展。
新中国成立之初,我国无法兼顾所有行业的发展,受制当时国内外封锁的环境,没有制造各类疏浚设备的条件更无法获得技术引进,这就导致了疏浚设备从国外进口的事实。不甘受制于人, 二十世纪五十年代初,百废待兴,疏浚业也急需发展在所有民族实业亟待发展之际,但归于现实钢铁材料的低劣和疏浚技术的亏缺,中国几乎照猫画虎式科研在挖泥船技术方面,对一些进口小型挖泥船进行仿制。[1]到了五十年代末期,中国终于组建了关于疏浚业专业设计院,厚积薄发到了六十年代末时,中国终于拥有了第一台自主研发设计的挖泥船。走出了第一步之后转眼到了二十世纪末期,治水工程的大力发展也急需疏浚业的配套跟进,因此国家的相关科研项目也得到了重点照顾和发展,但技术的突破非一朝一夕能完成,此时挖泥船的发展仍然无法配套经济的发展,二十世纪末后期还处于大量进口引进国外挖泥船设备的无法自给的紧张形态。
中国众多江河湖库,海岸线曲折漫长,水资源南丰富北贫瘠,水土流失严重,航运业是交通运输的重要组成,经济发展迅速,航运业难以配套经济的发展,沿海地带填海造地及河道治理、海洋发展战略势在必行。
图1-2 挖泥船分类
本文涉及到的填海造地所应用到的挖泥船品类繁盛,将挖泥船的工作机构作为主要的区分点,主要可以分为:抓斗式挖泥船,链斗式挖泥船、耙吸式挖泥船、铲斗式挖泥船、绞吸式挖泥船。[2]作为本文研究对象的挖泥船是最受业界欢迎的绞吸式挖泥船,它适用范围广、装配的绞刀头装置工作效率高,同时能在作业时将挖泥、运泥、卸泥等工作程序一条龙式地完成,除了工作效率非常高,更是机动性强,经济性好的挖泥船,也是目前应用在疏浚工程中最广泛的。挖泥船比较耗能的便是输泥管道,所以对于这方面的优化很有必要,若要优化就要研究两个重要的影响因素:泥浆浓度和泥浆的流速。
一般采用PID控制器来控制泥浆浓度,当河床条件和河流流量发生变化时,很难取得令人满意的效果。基于控制对象的特点,方案结合模糊自调整PID和模糊前馈算法。它可以动态地调整PID成形参数根据工作条件,并提供反馈,补偿根据自来水河流底部之间的距离,与传统PID控制相比,该方法具有过冲小、响应速度快、抗干扰能力强、稳定性好等优点。在泥浆流速控制方面,提出一种自适应自整定控制器,使液压比例阀实现精确的定位点流量控制,在控制器的设计中,采用了一种降低系统阶数从而减少辨识量的运动模型,该控制器基于极点配置技术,将主极点移动到需要的位置,此外,还提出了一种克服时延影响的预测器。研究表明,所提出的自控制控制器比传统PID控制器具有更好的性能,可以显著降低PID控制器的瞬态振荡和稳态误差。此外,闭环系统的性能是非常稳健的,因为在不同的运行条件下,系统响应保持不变。
1.2绞吸式挖泥船国内外现状与发展
航道建设和市政建设以及其他水下开挖运输建设、水域工程,挖泥船都有着不可替代的施工作用,具有广阔的市场无论是在中国还是在国外,特别是在低洼,航道较多或是缺少航道的这类国家,这些海洋国家多年来在疏浚技术和挖泥船取得相当大的进展。
国内外的疏浚技术发展趋势相对比,紧跟国际发展前沿的技术,开拓中国疏浚技术开发事业同时为开辟海外市场做提前打算,我国的疏浚设备跟随国外主流趋势研发也会免走弯路。挖泥船的发展趋势主要有以下四点:大型化、多功能化、高度智能化,生态环保化。[3]特别是高度智能化和环保生态化,这是新世纪的新发展,我国在这样的新兴需求方面没有历史包袱,发展起来更容易后发制人。
大型化:
海洋资源是各国发展的重中之重,习主席多次对南海的各种海洋平台表示关心,而海洋作业设备需要更具有抗风浪能力、更强的仓储性能,操作的高效性。基于这样的诉求,疏浚设备需要大型化,这样才会对于填海造岛等计划的实施更加有利。
多功能化:
多功能化会让挖泥船的有效利用率更高,一船多用,减少资源和人力的浪费,企业和国家可以通过小投资来完成工作,增加企业经济效益、减小国家负担。
高度智能化:
海上工作危险程度很高,通过高度智能化实现仪表化与自动化,最大程度降低人员的工作危险性,科技的发展使得船舶自动化程度日益提高,智能解放了高危劳动力,减低人工操作的难度,简化操作程序,随着操作效率的提高经济效益也随着提高,这样更有利于疏浚企业的发展。
生态化:
将海洋或河道挖掘,无论如何都会将动物和植物原有的生态水生环境破坏,因此自然状态下生态需要很久才会恢复原状。所以基于这方面的考量越来越多船厂致力于通过改善挖掘方式的技术来尽量减少生态破坏。另外挖泥船是一个高排放高耗能的设备,通过优化管道的输送耗能,适当的浓度和流速,这样节能减排也可以做到环保,也有高光谱成像技术的应用也可以避免破坏环境。
1.3研究的主要内容
- 对于绞吸式挖泥船,输泥管道的效率与泥浆的浓度与流速有直接的关系,为此要进行浓度和流速的控制。
- 浓度的控制方法采用经典的PID控制同模糊控制相结合,泥浆流速采用自适应控制控制方法。
- 对研究进行总结,控制泥浆的流速和浓度的主要工程目的是为了优化输泥管道,节能减排,提高挖泥船工作效率,据此作工作展望。
绞吸式挖泥船原理
根据结构见图2-1,在研究绞吸式挖泥船的浓度与流速控制之前,需要了解构成绞吸式挖泥船其重要疏浚系统设备以及各个设备的联系与功能。那么了解到相关的设备主要有:绞吸式挖泥船的挖泥刀具—绞刀,以及驱动装置—横移系统与斗桥、管道装置—组成由吸泥管道同排泥管道还有台车、种类较多的泵、柴油机、定位桩系统等。
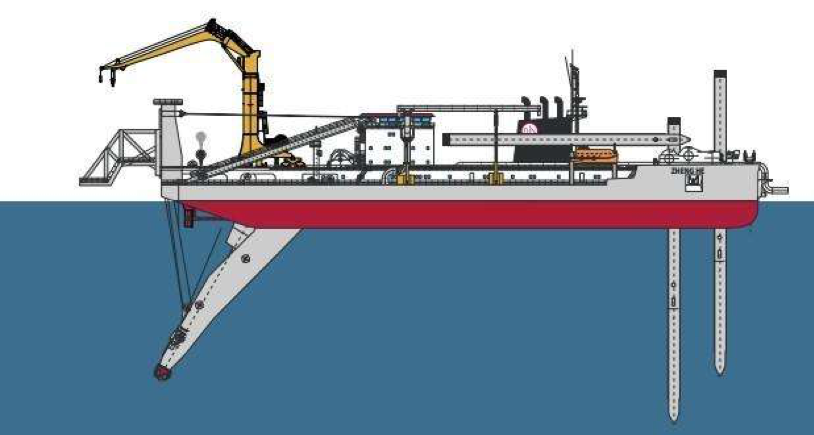
图2-1 挖泥船简易构型
根据图2-2看到各系统所在的位置,各系统的主要功用为:
泥浆泵:泥浆泵是本研究的重要系统,泥浆的流速主要由泥浆泵控制,泥浆泵强调耐磨性能,管道优化,流速控制器需要间接控制泥浆泵完成流速控制。

图2-2 泥浆泵
定位桩系统:主定位桩和辅助定位桩组成了定位桩,其作用类似于汽车的方向盘,使船舶按照预定的轨迹进行作业,除此之外还拥有一个至关重要的作用就是控制挖泥船的绞刀挖泥,定位装系统同本研究关联较小。
横移系统:控制泥浆过程浓度时主要依靠横移系统完成,通过横移系统控制斗桥的移动速度,小型绞吸式挖泥船易用电动传动,本文主要应用液压传动,包括横移绞车。
斗桥:控制绞刀头的下放深度,本文斗桥在控制泥浆浓度有所作为,分层工作时可用。
柴油机:是挖泥船上一切作业提供原动力,本文主要是调动开度用以调节泥浆流动速度,泥浆浓度也由它间接通过液压传动控制斗桥下放深度。
绞刀:泥浆的流速通过控制泥浆泵输出在最优点附近可以增大效率,除管道优化之外若想提高挖泥船效率,绞刀也是一个着重研究方面,绞刀的优良决定着形成泥水混合物的效率,主要作用就是切碎泥土和切割坚硬的泥块,使得泥泵提供的真空能够轻松地将绞碎了的沙石和松散的泥土吸到输泥管到中。



