内置式永磁同步电动机反电动势估算转子位置控制策略毕业论文
2020-02-18 11:06:26
摘 要
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)具有过载能力强和适于弱磁调速等优点,目前,它已广泛在工业现场、电动汽车、家用电器等各领域应用。其中,反电动势法适用于中高速运行,主要利用基频激励的反电动势(back electromotive force,EMF)或者磁链信息进行转子位置估计,广泛应用于无位置传感器PMSM控制系统中。本文研究基于反电动势法的内置式永磁同步电机估算转子位置。
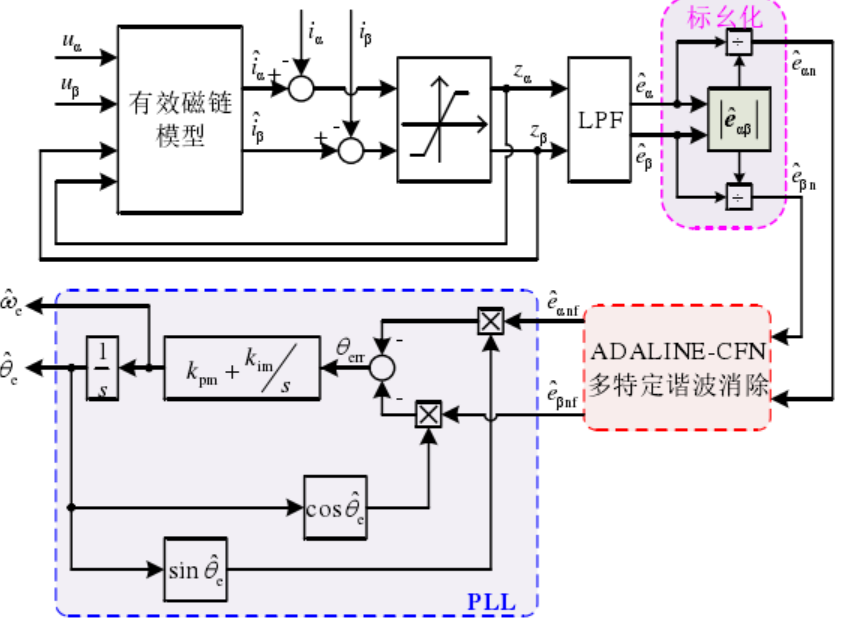
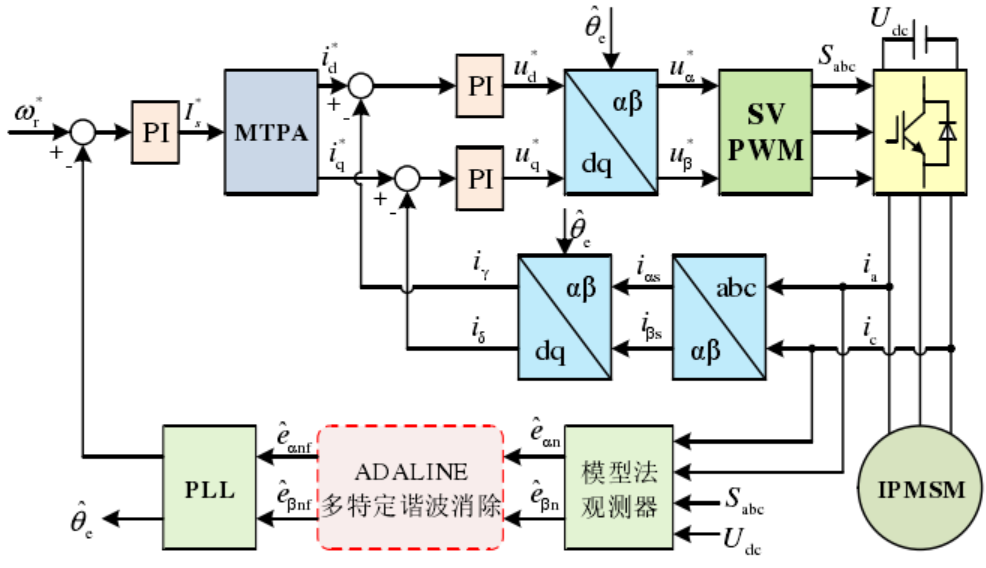
首先,由逆变器非线性和磁场空间谐波引起定子电流及反电动势产生6k±1次谐波,导致6k次转子位置脉动观测误差,设出一种改进的基于有效磁链模型的自适应滤波转子位置观测方法,实现无位置传感器内置式永磁同步电机(interior permanent magnet synchronous motor,IPMSM)矢量控制系统准确解耦控制并提高其控制性能;
然后,自适应陷波滤波器(adaptive notch filter,ANF)用于滤除指定的反电动势观测值谐波分量,改善正交软件锁相环的精度获得转子位置信息;
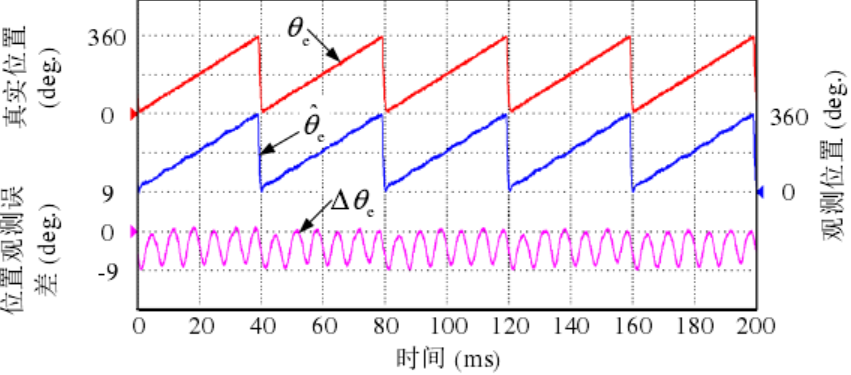
最后通过仿真,验证该方法能够有效减小转子位置观测误差。
关键词:内置式永磁同步电机 ;无位置传感器器控制;自适应滤波器
Abstract
The built-in permanent magnet synchronous motor (PMSM) has the advantages of strong overload capacity and suitable for weak magnetic speed regulation. At present, it has been widely used in industrial field, electric vehicles, household appliances and other fields. Among them, the back-EMF method is suitable for medium and high speed operation. It mainly uses the back-EMF or flux information excited by fundamental frequency to estimate the rotor position. It is widely used in Sensorless PMSM control system. In this paper, rotor position estimation of built-in permanent magnet synchronous motor (PMSM) based on back electromotive force (EMF) method is studied.
Firstly, the stator current and back-EMF are generated by the nonlinearity of the inverters and the space harmonics of the magnetic field, resulting in the 6k-order rotor position fluctuation observation error. An improved adaptive filter rotor position observation method based on the effective flux model is proposed to realize the accurate decoupling control of the sensorless built-in vector control system of permanent magnet synchronous motor and improve its controllability. Able;
Then, the adaptive notch filter is used to filter the harmonic component of the specified back-EMF observation value and improve the accuracy of the orthogonal software phase-locked loop to obtain the rotor position information.
Finally, the simulation results show that the method can effectively reduce the rotor position observation error.
Key words: built-in permanent magnet synchronous motor; sensorless control; adaptive filter
目录
Abstract II
第1章 绪论 1
1.1 研究背景和意义 1
1.2 国内外研究现状分析 1
1.2.1 无位置传感器控制技术研究现状 2
第2章 永磁同步电机的数学模型 5
2.1 ABC坐标系数学模型 5
2.2 关于静止旋转变换的原理 7
2.3 本章小结 8
第3章 反电动势谐波的永磁同步电机数学模型 9
3.1 滑模观测器原理分析 9
3.1.1 滑模变结构控制原理 9
3.1.2 PMSM 转子滑膜观测原理 10
3.2 基于有效磁链模型的滑模观测器 11
3.3 关于转子位置误差的脉动分析 13
3.5本章小结 16
第四章 基于 ADALINE 的位置误差脉动抑制 16
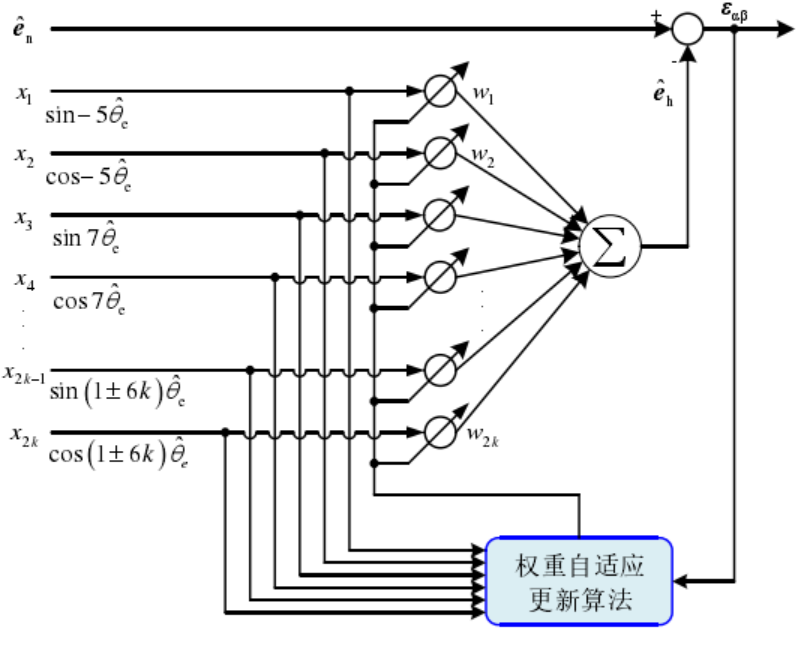
4.1 ADALINE 自适应滤波器构建 16
4.2 采用 LMS 算法的自适应滤波方法 18
4.3建模及仿真 19
4.4实验结果分析 20
4.5本章小结 24
参考文献 25
致谢 27
附录A 28
第1章 绪论
1.1 研究背景和意义
近几十年来,交流电机在工业发展过程中扮演着非常重要的角色,如大型工业设备起重机,伺服控制器机床等,在我们的生活中早已应用广泛。交流电机主要可分为同步电机和异步电机两大类。前者具有高效率、高功率因素、高控制精度等优点;后者具有结构简单、价格低廉、运行可靠等优点。
永磁同步电机因在工业中获得广泛应用,是因为其效率高、重量轻、体积小的特点。永磁同步电机可分为表贴式和内置式两种。内置式永磁同步电机(Interior PMSM, IPMSM)具有高功率密度、高转矩电流比。由于高性能稀土永磁材料不断发现,电机控制技术不断地成熟与完善,使得其在民用,航天和军事等领域有着广泛的应用。
传统的永磁同步电机矢量控制系统检测转子位置和转速信息需要安装位置传感器,然而高精度、高分辨率的速度或位置传感器因其系统成本增加,可靠性降低,不利于在特殊工作环境下的应用。基于这些缺陷,永磁同步电机控制的研究诞生了无位置传感技术这一分支。
永磁同步电机的无位置传感器控制技术通常可分为高频信号注入法和适用于电机数学模型的方法。前者适用于低和零速区间,后者适用于中高速区间;前者利用电机转子凸极效应估算转子位置和转速,后者其转子位置和转速的估算依赖于电机反电动势。
通常,直流偏移和脉动误差是电机数学模型法获得的转子位置误差。建模的不确定性会产生直流偏移误差,逆变器非线性和磁场空间谐波会产生脉动误差。针对这些问题,本文将会进一步的探讨。
1.2 国内外研究现状分析
永磁同步电动机(PMSM)系统在电动汽车驱动方面应用价值极高,其特点为控制精度高,转矩密度高,转矩平稳性良好以及噪声低。为获得较高的弱磁性能,需要合理设计永磁磁路结构,从而提高电动机的调速范围。这种理想的电动汽车驱动系统已经得到了国内外电动汽车界的高度重视,普遍应用于汽车市场。1965年,日本就开始研制电动车,且日本电动车协会于1967年成立。日本汽车公司青睐于永磁同步电机,究其原因是因为它良好的性能。东京电机公司的插入式永磁同步电机作于1996年被丰田汽车公司的电动车作为驱动电机,同年,丰田汽车下属的日本富士电子研究所研制了可以达到最大功率50kW,最高转速1300r/min的永磁同步电机。新一代被尼桑公司发明的电动小客车于1998年在美国加利福尼亚州投入使用。
在国内,对这方面进行研究的高校和机构越来越多。李永东教授在清华大学发表了很多包括感应电机无传感器控制方面的观测器法的论文,这些论文还涉及高频信号注入法;自然,其内容也包括了永磁同步电机初始位置检测的方法的等无传感器控制;其他各高校,例如浙江大学、天津大学、西安交通大学的学者也取得了相应丰硕的成果。
1.2.1 无位置传感器控制技术研究现状
仅通过电机模型便可以实现对转子磁极位置信息的估计的方法为模型法,该方法适用于中高速无位置传感技术,实现方法相对简单,其原因在于不需要转子凸极信息和额外测试信号。因此,无位置传感器永磁同步电机矢量控制系统中常常使用模型法。
反电动势或磁链信息观测、位置误差信号解耦和位置/转速跟踪器是模型法的位置/转速观测的三个部分。较常见的模型法包括模型参考自适应法、磁链观测器法、滑模观测器法等是根据反电动势或磁链信息观测的不同方法。位置误差信号收敛是通过滑模观测器方法变结构控制实现的,具有较强的鲁棒性;通过对其合理设计,由反馈增益矩阵结构多样性的特点,状态观测器法能够适应多种复杂工况。稳态情况下位置误差信号具有统一形式,位置观测误差的主要来源是d轴电压扰动和 q 轴电感不确定性,可通过文献[18]对比测试 4 种不同模型法发现。通过简单的代数运算或三角函数运算,在获取反电动势或磁链信息后,就可以解耦出位置误差信号。用于跟踪最终位置/转速信息的两种主要途径是比例积分跟踪器和Luenberger观测器。
内置式永磁同步电机转子位置在反电势和电感矩阵中均有耦合项,其原因在于 d-q 轴磁路不对称;各国学者提出了众多方案为了改善观测效果,提高观测器自适应性。例如Boldea I等人提出了将凸极电机转化为隐极式电机,从而简化 IPMSM 无位置传感器控制模型法观测器的设计,该方案是基于有效磁链模型的无位置传感器控制提出的。
1.2.3 抑制位置误差脉动和补偿逆变器非线性研究现状
永磁同步电机中高速运行方案是基于反电动势模型的无位置传感器控制技术;但是,随着模型法无位置传感器控制的发展,一些关键问题如逆变器非线性负面效应在应用领域向高动态运行场合拓展中引起了广泛关注;此外,还有诸如在转矩(电流)脉动等问题。
通常,转子位置误差包含两部分。其一是直流偏移,由建模不确定性产生;其二是脉动误差,由逆变器非线性和转子磁场空间谐波产生。静止轴系下反电动势观测值中含有 1±6k 次脉动谐波分量,这是因为受变频器的非线性及电机转子磁场的空间谐波影响,导致转子位置观测值中存在显著的 6k 次谐波脉动。位置误差脉动最终产生的负面影响诸如转矩脉动、损耗增加、稳定性降低都是由于磁场定向不准确。近几年,很多学者提出了改善无传感器驱动系统的性能,包括相应的逆变器非线性补偿和位置观测误差脉动抑制方法。在逆变器输出电压与给定电压之间产生电压误差,由于逆变器的非线性,例如死区区间和开关特性,会产生两种脉动模式:一是在静止轴系下表现为 1±6k 次脉动,二是在同步轴系下表现为 6k 次脉动形式。电流输出转矩脉动,还产生了额外损耗,降低了位置观测精度,其原因都是由逆变器非线性引起的电流脉动产生的。降低电流(转矩)脉动通常是在电流反馈环路引入 LPF ,然而,该方案导致了电流环带宽和系统动态响应能力降低。因此,相应的逆变器非线性补偿策略被各国学者提出。
文献[5]指出模型方法的低速不稳定产生的原因是逆变器非线性振幅所限制的,并且逆变器非线性是用梯形电压波波补偿。文献[7]提出了当电机稳定运行时逆变器非线性的在线补偿方法,但该方法具有显著的局限性。Zhu Z Q 教授等人进一步提出获得一定的补偿非线性效果的方案,然而在实际复杂工况中很难应用。文献[9]在线自适应改变梯形波补偿斜率,源于电流检测结果下的积分调节器。文献[10]基于精确逆变器非线性模型,得到了精确的逆变器非线性模型,缺点是算法不通用。
在基于模型法观测器的永磁同步电机无位置传感器控制方法应用中,需要解决的关键问题大致包含如下:1.消除位置观测误差脉动和电流(转矩)脉动,前提是不影响基波分量;2.进一步提高观测器动态性能,3.该解决方案具有通用性及更强的鲁棒性。
1.3 主要研究内容
对于内置式永磁同步电机研究其无位置传感器矢量控制技术,主要对基于反电动势模型的 IPMSM 转子位置滑模观测器进行研究。结合Matlab/Simulink仿真,并针对研究过程中出现的问题进行理论分析,提出方法,解决问题,最后进行实验验证。论文共分为 5 章,各章安排如下:
第 1 章 主要介绍IPMSM传感器控制技术研究意义以及发展现状。
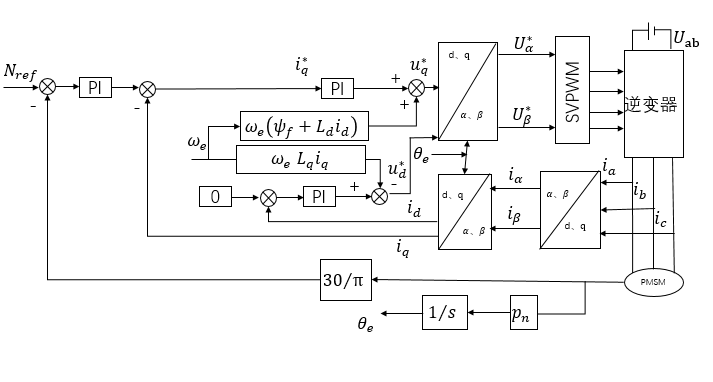
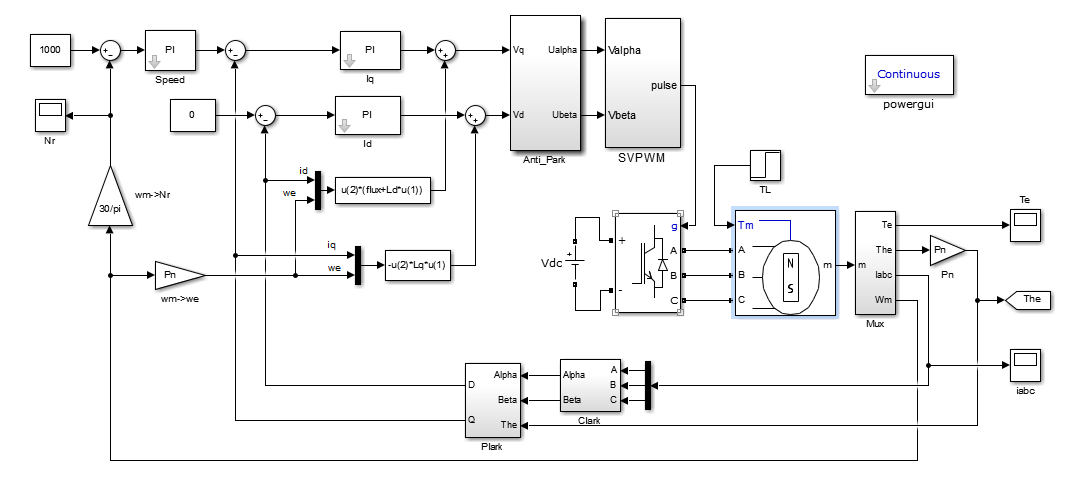
第 2 章 主要分析永磁同步电机的物理模型,建立数学模型,实现内置式永磁同步电机的矢量控制系统。
第 3 章 基于静止轴系有效磁链模型状态观测器误差及特性,揭示转子位置观测谐波误差的原理的基础上,建立起考虑反电动势谐波的永磁同步电机数学模型。
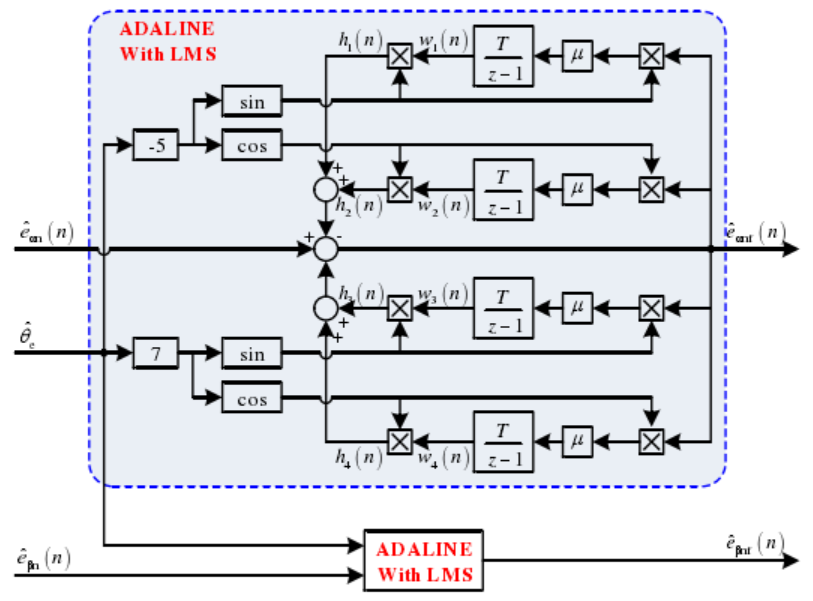
第4章 根据自适应对消原理,改进有效磁链模型转子位置观测方法。研究基于最小均方算法(Least Mean Square, LMS)自适应权重更新算法,保证ADALINE的快速收敛性。利用 ADALINE 对输入信号指定频率谐波成分具有理想阻带特性,并实现位置观测误差脉动抑制。
最后为致谢。
第2章 永磁同步电机的数学模型
2.1 ABC坐标系数学模型
永磁同步电机是一个强耦合的系统,为可以更好设计PMSM控制算法,需要建立合适的数学模型。
如图2.1所示,永磁同步电机可分为按转子结构具体可分为三种:表面式,嵌入式和内装式。
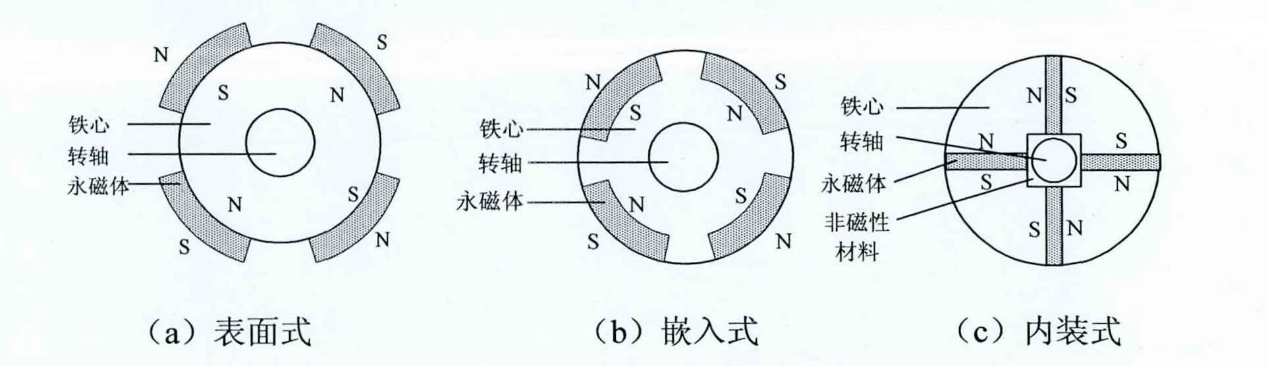
图2.1 永磁同步的电机转子结构
表面式转子结构上比较简单,但是机械强度较差;嵌入式和内装式结构复杂,机械强度较好。所以一般情况下,前者运用在电机转速较低的场合;后两者可以应用在电机转速较高的场合。
假设永磁同步电机涡流和磁滞损耗被忽略不计;在转子磁路不存在阻尼绕组;电感是线性的,恒定的;电流是三项正弦波。即为理想的状况的同步电机。
在ABC坐标系下建立其数学模型,电压方程为:
(2.1)
其中,、、——定子三相电压
、、——定子三相电流;
——定子电阻;
、、——定子三相的全磁链。
磁链方程为:
(2.2)
其中,、、——三相绕组的磁链。
——定子同步电感。
将电磁转矩为磁场储能对机械角偏导,有:
(2.3)
以上方程为PMSM在自然坐标系下的基本数学模型。由(2.2)可得,定子磁链是转子位置角的函数;由(2.4)可得,PMSM数学模型是一个多变量系统,其特点是较为复杂,耦合性较强。为了对PMSM数学模型进行解耦,需要选择合适的坐标变换,从而设计更好的控制器。
2.2 关于静止旋转变换的原理
简化永磁同步电机的数学模型,一般采用静止坐标变换和同步旋转坐标变换。各个坐标系的关系如图2.2所示。
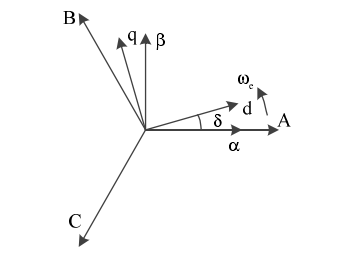
图2.2 各个坐标系之间的关系
静止坐标变换就是将自然坐标系变换成静止坐标系的坐标变换,简称为Park变换。图2.2所示为的坐标系之间的关系,坐标系变换公式如式(2.5):
(2.5)
其中,为电机电压、电流等变量。
将静止坐标系变换成同步旋转坐标系的坐标变换称为同步旋转坐标变换(Park变换)。坐标系变换公式如式(2.6):
(2.6)
将ABC自然坐标系变换到同步旋转坐标系,坐标系变换公式如式(2,7):
(2.7)
以上变换公式是基于几种坐标系之间。变换矩阵系数取,原因在于幅值不会改变。相同情况下,在功率不变时,该系数为。在三相对称系统的计算中,零序分量应当忽略。
(2.12)
其中:——电机的机械角速度();
——电机的转速()。
(2.20)
2.3 本章小结
本章首先介绍了永磁同步电机在ABC坐标系下的数学模型。同步旋转坐标系d-q数学模型、α-β静止坐标系下的数学模型是通过坐标变换得到的。定子电流之间存在耦合,除去定子电流间的耦合,才能提高永磁同步电机的控制性能。
第3章 反电动势谐波的永磁同步电机数学模型
本章会基于滑膜观测器的原理分析入手,研究基于有效磁链的滑膜观测器,揭露其静止轴系下误差源及特性,揭示转子位置观测谐波误差的机理。
3.1 滑模观测器原理分析
3.1.1 滑模变结构控制原理
目前变结构控制是一种较为综合的方法,其实现较为容易,且便于理解与应用。该方法本质上是一种可以根据系统当前状态不断变化,迫使其沿着先前定义的“滑动模态” 状态轨迹移动的非线性控制。所以,又称它为滑模变结构控制。
“滑动模态”也称为“滑动运动”,实质上也是一种运动。设在n维空间中有一个超平面:
该超平面将空间 分成两部分:和 。
动态系统: ,
超平面称为滑动模态区,或滑模区。并且,当运动点接近超平面时,必须满足:
,
或者
系统的变结构控制可以表述为:有一个非线性控制系统
其中:
确定其滑模面:
并且寻求变结构控制函数:
时
式中 ,体现了变结构控制的思想。所谓滑模变结构控制,其定义包含两个点:其一是滑模运动是渐进稳定的;其二是滑模面 以外的点在有限时间内运动到滑模面上。
3.1.2 PMSM 转子滑膜观测原理
目前,被提出的关于永磁同步电机无位置传感器控制众多方法中,大多数都受到电机参数变化的影响,例如定子电阻、电感等。因为滑模观测器不局限于基本结构,而非线性系统工作点变化的情况不能用传统的线性估计方法,所以是一理想的控制方法,值得注意的是条件为电机模型。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: