永磁同步电动机调速系统分数阶控制研究毕业论文
2020-02-18 10:57:31
摘 要
永磁同步电机(PMSM)因具有高功率密度、宽调速范围和高转矩惯量比等优点,在数控机床、作动系统和工业机器人等运动控制领域应用越来越广泛。本文基于PMSM的PI控制,在PI控制较为理想的基础上,使用分数阶 控制进行进一步的优化控制,从而达到更理想的控制效果。
控制进行进一步的优化控制,从而达到更理想的控制效果。
首先,基于经典控制理论的研究,在对PMSM调速系统频域模型基础上,推导出了电流环、速度环的PI控制器参数计算解析式,其中推导过程中,分别考虑了反馈滤波器、延时、死区、逆变器及其他非理想因素的影响之后,结合工程,进一步确定了电流环和速度环的开环截止频率和相位裕量的合理取值范围。根据系统性能要求,设定期望的电流环和速度环的开环截止频率 以及相位裕度
以及相位裕度 ,按照数学方法,计算PI控制器参数,对其进行进一步校正。
,按照数学方法,计算PI控制器参数,对其进行进一步校正。
其次,将PMSM整数阶PI控制模型推广到分数阶 控制模型。基于Carlson算法、期望的幅值裕量
控制模型。基于Carlson算法、期望的幅值裕量 和相位裕量
和相位裕量 设计最优
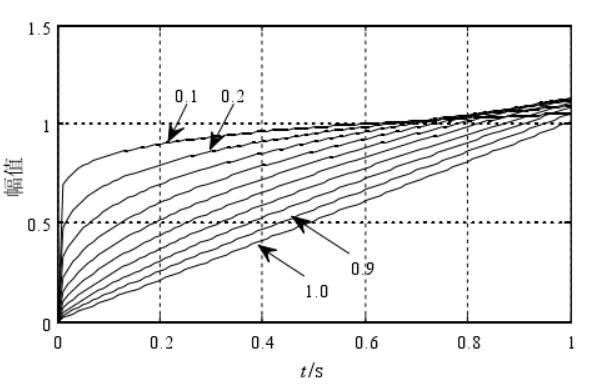
设计最优 控制器。经计算调节该模型的分数阶控制器的阶次后,得到电机调速系统的一簇阶跃响应曲线,选动静态特性相对最好的曲线和它所对应的分数阶次,用作PMSM的分数阶模型阶次,构造PMSM的分数阶模型。
控制器。经计算调节该模型的分数阶控制器的阶次后,得到电机调速系统的一簇阶跃响应曲线,选动静态特性相对最好的曲线和它所对应的分数阶次,用作PMSM的分数阶模型阶次,构造PMSM的分数阶模型。
最后,通过Simulink仿真和结果分析的进一步比较可得分数阶机模型具有比整数阶更好的动静态特性描述效果。
关键词:永磁同步电机;PI控制器;分数阶 控制器算法;截止频率;相位裕度;龙格-库塔算法
控制器算法;截止频率;相位裕度;龙格-库塔算法
Abstract
Permanent magnet synchronous motor (PMSM) has been widely used in CNC machine tools, actuating systems and industrial robots for its advantages of high power density, wide speed range and high torque inertia ratio.This thesis is based on the PI control of PMSM. On the basis of the idealcontrol, fractional control is used to further optimize the control, so as to achieve more ideal control effect.
First of all, based on the research of classical control theory, the all-digital fuzzy control system based on frequency domain model, deduced the current loop, speed loop PI controller parameters of analytical calculation, the derivation process, respectively, considering the feedback filter, time delay and dead zone, inverter and other non-ideal factors, combined with the engineering, further determine the cut-off frequency of the current loop and speed loop open loop and the reasonable value range of the phase margin.According to the system performance requirements, the desired open-loop cut-off frequencyand phase marginof the current loop and speed loop were set, and the PI controller parameters were calculated in accordance with the mathematical method for further correction.
Secondly, the integer order control model of PMSM is extended to the fractional order control model.The optimal controller is designed based on Carlson algorithm, expected amplitude marginand phase margin
control model of PMSM is extended to the fractional order control model.The optimal controller is designed based on Carlson algorithm, expected amplitude marginand phase margin .After calculating and adjusting the order of the fractional order controller of the model, a cluster of step response curve of the motor speed regulation system is obtained. The curve with the best dynamic and static characteristics and its corresponding fractional order are selected and used as the fractional order model of PMSM to construct the fractional order model of PMSM.
.After calculating and adjusting the order of the fractional order controller of the model, a cluster of step response curve of the motor speed regulation system is obtained. The curve with the best dynamic and static characteristics and its corresponding fractional order are selected and used as the fractional order model of PMSM to construct the fractional order model of PMSM.
Finally, by further comparison of Simulink simulation and result analysis, it can be concluded that fractional order machine model has better dynamic and static characteristics than integer order.
Key words: Permanent magnet synchronous motor; PI controller; Cutoff frequency; Phase margin; Runge-kutta algorithm;Fractional order controller algorithm
controller algorithm
目录
摘 要 I
第1章 绪论 1
1.1论文选题及意义 1
1.2永磁同步电动机研究现状 1
1.3分数阶段控制器研究现状 2
1.4分数阶控制器在永磁同步电动机中的应用 4
1.5本文结构 5
第2章 研究基础 ` 7
2.1分数阶微分方程 7
2.2分数阶微积分算子的近似 8
2.3本章小结 10
第3章 PMSM的调速系统PI控制 11
3.1 PMSM调速系统数学模型 11
3.1.1PMSM的数学原理分析 11
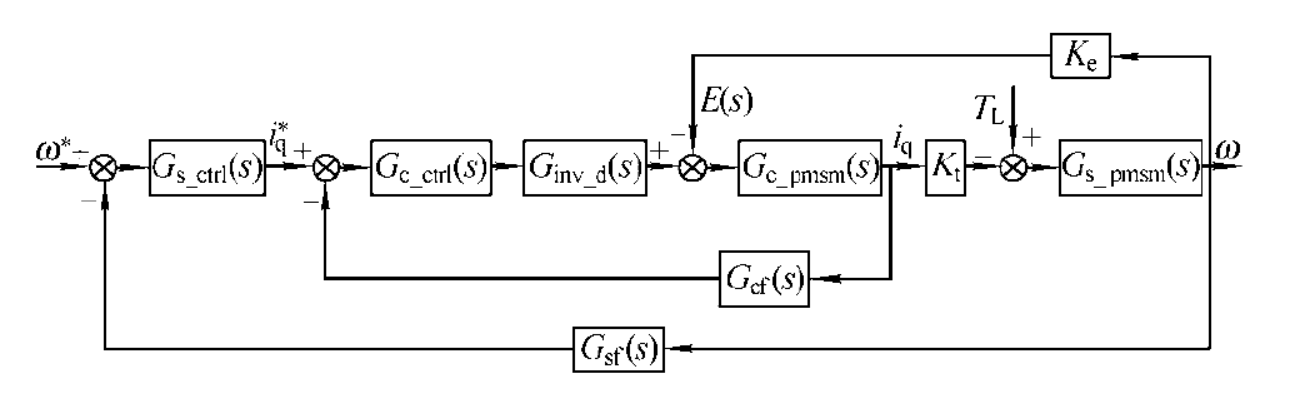
3.1.2 PMSM的系统框图 12
3.2 电流环和转速环的的设计 13
3.2.1 ACR电流环分析 13
3.2.2 ASR速度环分析 14
3.3 双环调节器的功能 16
3.3.1 速度环 的功能作用 16
的功能作用 16
3.3.2 电流环 调节器的功能作用 16
调节器的功能作用 16
3.4 仿真 17
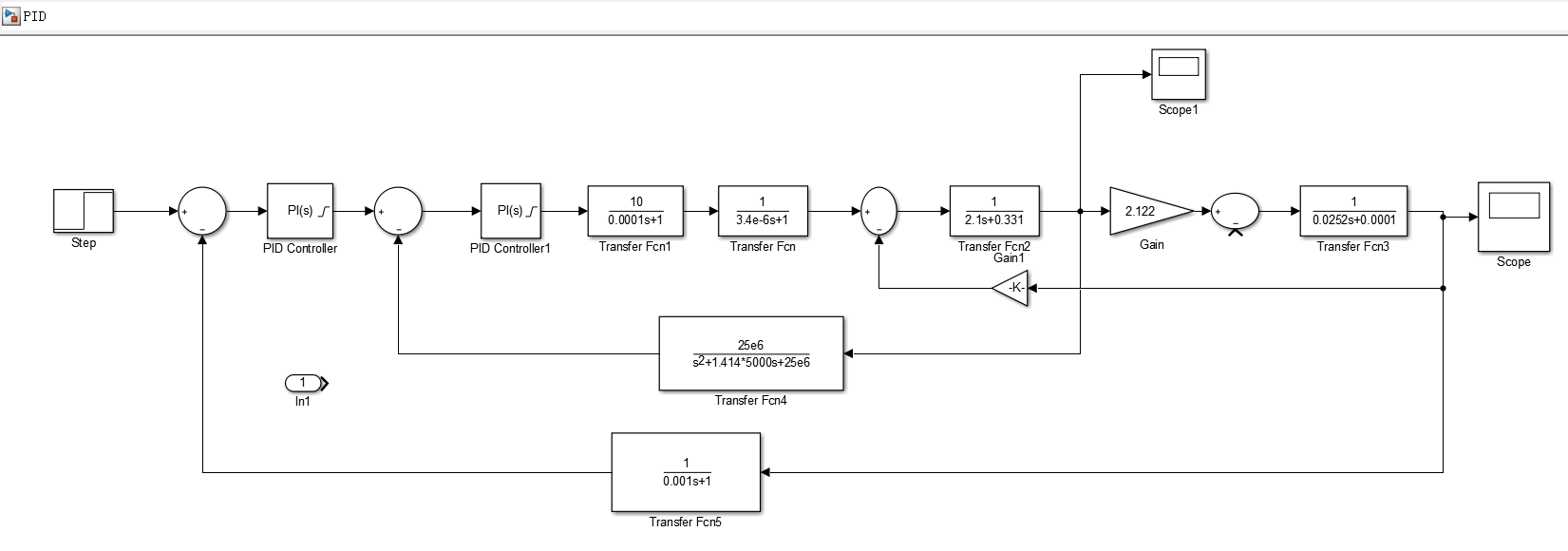
3.4.1 Simulink仿真 17
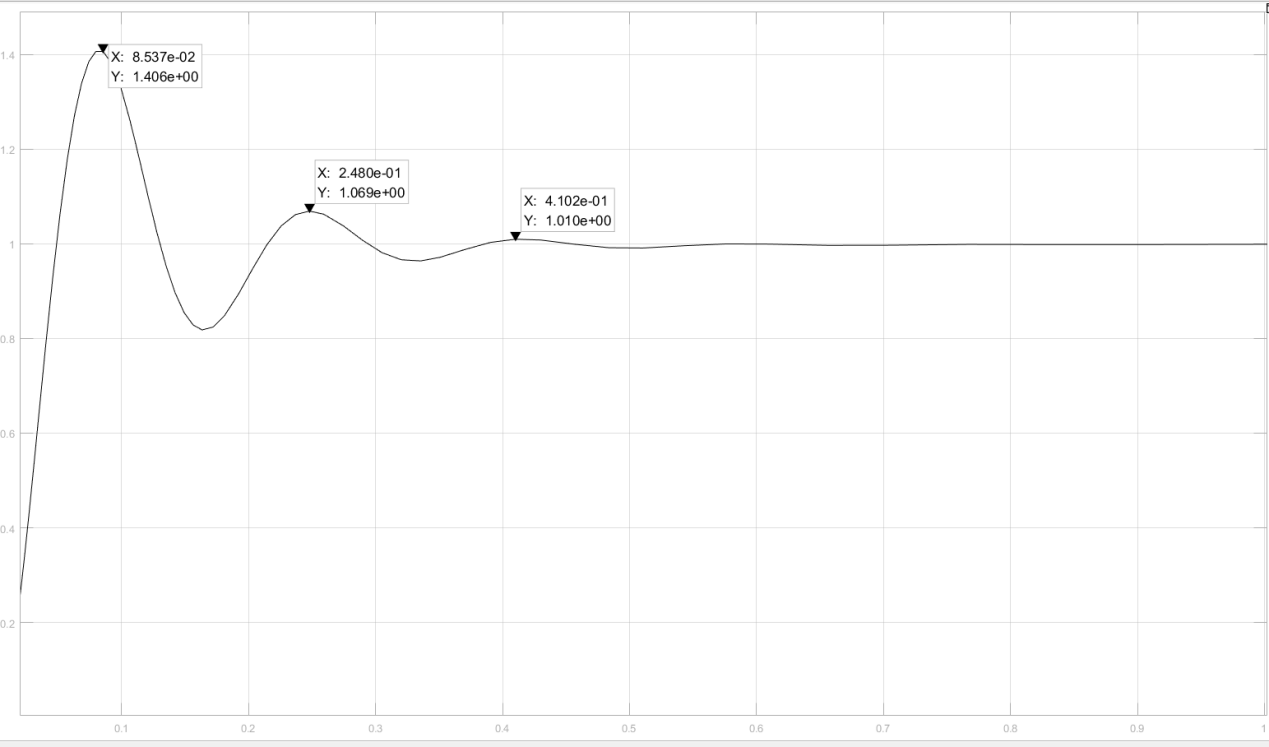
3.4.2 系统阶跃响应结果及分析 19
3.5 本章小结 20
第4章 分数阶建模与仿真 21
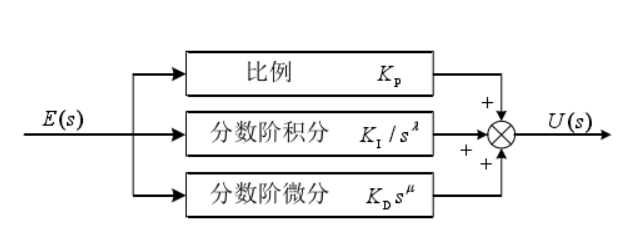
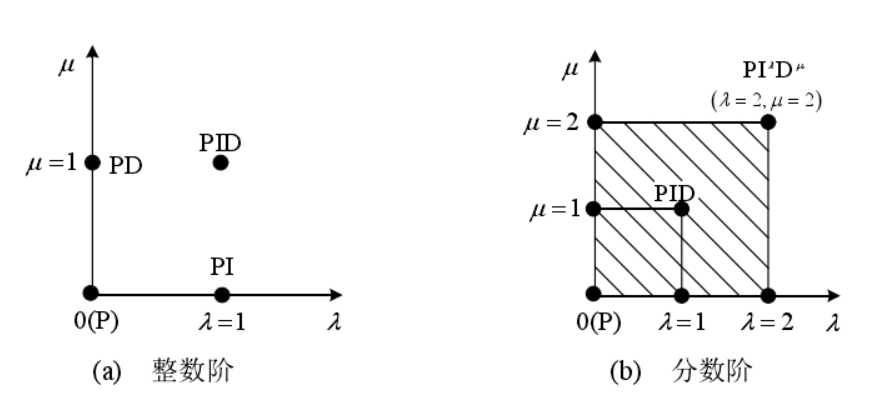
4.1分数阶PID控制器理论基础 21
4.2分数阶积分环节特性分析 22
4.2.1分数阶 控制器的参数设定方法 23
控制器的参数设定方法 23
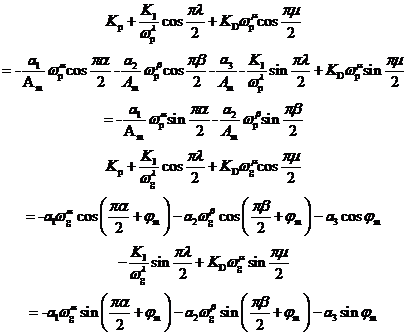
4.2.2分数阶控制器的计算 24
4.3分数阶控制器仿真 26
4.3.1控制器的编译 26
4.3.2步长的影响及数学分析 28
4.3.3 基于Carlson(newton)算法近似 30
4.3.4 分数极控制仿真 32
4.3.5系统阶跃响应结果及分析 32
4.4传统PI控制和分数阶段 仿真结果的对比分析 34
仿真结果的对比分析 34
4.5本章小结 35
第5章 总结与展望 36
致谢 37
参考文献 38
附录A 分数阶数学基础 41
附录B 分数阶控制器的设计计算 45
附录C 四阶龙格-库塔法的计算 47
附录D 控制器参数设置计算 50
附录E 阶跃响应数据 53
第1章 绪论
1.1论文选题及意义
永磁同步电机体积小、各方面损耗小、构造相对简单,而且效率高。和比于直流电机,它没有换向器和电刷等缺点。和异步电动机相比,因为没有励磁电流,所以效率高,功率因数大,力矩惯量比大。电机运转时定子电流和定子电阻损耗小,且转子参数可测,可以更好地实现控制。和普通同步电动机相比,没有励磁装置,提高了效率。PMSM矢量控制系统能够实现高精度、高动态性能、大范围的调速控制,因此PMSM矢量控制系统引起了国内外学者的广泛关注。在一般的工程问题中,PMSM驱动系统经常会采用容易实现、结构简单、性能良好、相关参数的变化不是特别敏感的PI控制器。
PI控制器的参数设置不合理,将导致控制系统的性能不达标。为了解决这一系列问题,本文基于PMSM的调速系统的频域模型,推导ACR和ASR的PI控制器中的参数 和
和 两个参数的解析计算式。按照系期望的开环截止频率和相位裕度,设计出满足ACR和ASR满足动稳态性能要求的控制器参数。
两个参数的解析计算式。按照系期望的开环截止频率和相位裕度,设计出满足ACR和ASR满足动稳态性能要求的控制器参数。
基于此,为了能够对PMSM系统实现更理想的控制,将整数阶PI控制器替换为分数阶 控制。
控制。
1.2永磁同步电动机研究现状
异步电动机在调速系统中得到了广泛的应用是在交流调速系统发展初期。同步电机的应用在变频器出现之后,才得以广泛应用。因为在工频电源下, 一个周期内转子在定子旋转磁场内施加的平均转矩为零,同步电机不能自启动。因此,在没有变频器广泛应用的时候,对同步电机进行调速很困难。为了对其进行调速,一般是在大功率范围内,改善电网功率因数,才能完成调速,而且调速控制效果够理想。变频电源技术解决了上述问题,使得PMSM在工业调速系统中发展与应用。
因为永磁材料性能的提高,工业生产率大幅增长,永磁同步电机逐步成为当今调速系统的主流执行机构。交流永磁电机主要分为两大类:相感应电势波形为梯形波的称为无刷直流电机,相感应电势波形为正弦波的称为永磁同步电机简称PMSM。本文就是PMSM的基础上进行进一步的研究。PMSM按永磁体所的位置不同,可分为旋转磁极式和旋转电枢式;按所使用的永磁材料种类多少可分为单一式结构和混合式结构;在转子上的安置方式可分为表贴式、内嵌式和内埋式。由于永磁材料的磁导率与空气的磁导率十分接近,因此表贴式永磁同步电机属于隐极电机;内嵌式永磁同步电机和内埋式永磁同步电机在直轴磁路和交轴磁路上区别很大,所以交直轴电感电机属于凸极式电机。
1.3分数阶段控制器研究现状
尽管分数阶控制理论还在进一步加强完善中,但现在,国内外在分数阶控制系统中的研究已经在鲁棒控制、信号处理、神经网络和图像处理等信息科学领域出现,人们对分数阶的重视程度日益增加。分数阶控制系统的应用具有如下特点:在宏观的形势上,分数阶的概念不断在神经网络、鲁棒控制、信号处理等信息科学电子工程等领域有实际应用;在工程实物上,分数阶控制系统及其控制器的应用涉及各个领域,它的实现决定着应用的前景,所以更加理想的分数阶微分电路的设计尤为重要;在控制元件上,分数阶控制器当前所能应用的种类还不能满足各领域的需求,且设计方法不系统,需要进一步完善和统一。在分数阶的系统与控制器方面,初步将分数阶微分电路应用于分数阶控制器在信息科学领域中,为后续研究奠定了的基础。
现在分数阶控制器可以分为四种:第一种叫做TID控制器。它是由积分环节和一个分数阶环节并联而成。其结构很简单,参数较少,调节方便。但由于可调参数很少,对系统控制不全面,很难达到理想的控制效果;第二种是Oustaloup提出的CRONE控制器。分数阶控制具有良好的鲁棒性,所以分数阶鲁棒控制器CRONE也是最早成功的应用范例。在MATLAB得以深入应用;第三种是 控制器。控制性能在控制上有很大提升,但结构复杂参数繁多,其内部控制系统含3个增益和两个阶次参数。在分阶系统零极点特点的认识和理解的基础上,若采用P(ID)
控制器。控制性能在控制上有很大提升,但结构复杂参数繁多,其内部控制系统含3个增益和两个阶次参数。在分阶系统零极点特点的认识和理解的基础上,若采用P(ID) 控制器,是更为合理的应用选择。它不但有效保证控制性的基础上,而且简化了在设计上数据和结构的复杂度;第四种是含有超前滞后校正的补偿器,为了在应用方面取得了好的控制效果,需要对它的设计方法进行整定。在分数阶系统扩展频域法的基础上,将控制器的零极点意义和形式进行统一,并对分数阶超前校正器与超前滞后校正器进行重新建模编译。
控制器,是更为合理的应用选择。它不但有效保证控制性的基础上,而且简化了在设计上数据和结构的复杂度;第四种是含有超前滞后校正的补偿器,为了在应用方面取得了好的控制效果,需要对它的设计方法进行整定。在分数阶系统扩展频域法的基础上,将控制器的零极点意义和形式进行统一,并对分数阶超前校正器与超前滞后校正器进行重新建模编译。
传统的整数阶微积分,运算阶次为一阶、二阶等更高阶次。而分数阶微积分,就是运算阶次为分数的微积分运算。其中“分数”不仅指有理分数也可为任意实数。
目前,永磁同步电动机已广泛应用于电力电子和电力传输领域。分数阶PID控制器是一种新型的PID控制器。因为增加了两个可调参数,控制器设计具有更大的灵活性和控制能力。因此,本文在PMSM整数阶PI控制器的基础上进行分数阶 控制器的参数设计。仿真结果表明,分数阶
控制器的参数设计。仿真结果表明,分数阶 控制器可以明显提高PMSM调速系统的控制性能。
控制器可以明显提高PMSM调速系统的控制性能。
分数阶微积分与整数阶微积分基本上是同时开始发展的,在整数阶微积分创建的时候,分数阶微积分的研究也同步进行。由于当时分数阶物理意义很难适配实际问题,计算复杂度一时间难以解决,所以分数阶微积分一直没有得到很好的发展,仅处于初级的理论研究阶段,没有投入工程使用中。时至今日,为了科学技术的发展和解决复杂工程问题,很多方面需要分数阶微积分作为理论基础与数学工具,才能在原来的研究基础上进行突破。
随着分数阶研究的深入,它的理论被快速的引入到各个学科中。分数阶控制理论便是分数阶微积分在控制科学与工程中的实际应用,它主要的研究内容包括对复杂系统进行分数阶建模,进而设计分数阶控制器,得到控制效果远远超过一般控制模型,从而使工程应用能够达到更加精准、迅速、稳定的要求。
一般的建模方式通常将非线性的系统近似成整数阶系统,这样的建模方式存在设计偏差,有时甚至不能反应系统的重要特性。实际工程的非线性特征可以通过利用分数阶微积分进行控制,对复杂系统建立的数学模型比整数阶系统更能接近实际工程的系统要求。
分数阶控制理论研究的热点现在就是分数阶控制器的设计,它主要包括三方面内容:整数阶对象设计分数阶控制器;为分数阶对象设计整数阶控制器;为分数阶对象设计分数阶控制器。包含分数阶小积分环节的分数阶TID控制器,它的鲁棒性要比PID控制器更好。分数阶超前滞后补偿器在经历一段时间的研究后也被提出,该控制器也表现出了很好的控制特性。可是关于它的设计方法现在还是不完善,还需进一步研究。随着可调参数的增多,许多复杂的问题也相继出现,例如对控制器的参数整定,就是系统调节的很大困难。怎样才能有效地整定分数阶控制器的参数已是当前分数阶控制领域的研究重点。
文献[1-3]提出了满足控制系统具有相对稳定性和鲁棒性条件的分数阶 控制器参数整定的方法。文献[4,5]发现了了分数阶
控制器参数整定的方法。文献[4,5]发现了了分数阶 控制器各参数的模糊自适应规律,同时结合模糊推理规则,实现了良好的参数动态调节。文献[6]采用了BP神经网络调节控制器调节各个参数,设计了一种参数自学习的分数阶控制器。文献[7,8]为分数阶
控制器各参数的模糊自适应规律,同时结合模糊推理规则,实现了良好的参数动态调节。文献[6]采用了BP神经网络调节控制器调节各个参数,设计了一种参数自学习的分数阶控制器。文献[7,8]为分数阶 控制器设计了一种自适应粒子群的参数优化方法,并通过对不同被控对象的仿真实验验证了该方法的可行性。文献[9]改进了遗传算法,并对分数阶
控制器设计了一种自适应粒子群的参数优化方法,并通过对不同被控对象的仿真实验验证了该方法的可行性。文献[9]改进了遗传算法,并对分数阶 控制系统与整数阶PI控制系统的参数进行优化,在相同的被控对象下通过对比仿真,说明了分数阶
控制系统与整数阶PI控制系统的参数进行优化,在相同的被控对象下通过对比仿真,说明了分数阶 改善了系统的控制效果,同时还减少了系统的能量损耗,性能更好。文献[12]提出了分数阶比例微分
改善了系统的控制效果,同时还减少了系统的能量损耗,性能更好。文献[12]提出了分数阶比例微分 的导引律,此规律提高了导弹制导系统的鲁棒性。文献[13]将分数阶控制器在智能车的控制系统中应用,有效抑制了外部干扰和模型参数变化对系统的影响。文献[14]利用稳定域边界法为直流电机调速系统设计了一种分数阶
的导引律,此规律提高了导弹制导系统的鲁棒性。文献[13]将分数阶控制器在智能车的控制系统中应用,有效抑制了外部干扰和模型参数变化对系统的影响。文献[14]利用稳定域边界法为直流电机调速系统设计了一种分数阶 速度调节器,取得了较好的控制效果。文献[15]将分数阶
速度调节器,取得了较好的控制效果。文献[15]将分数阶 控制器应用到非线性锅炉-汽轮机系统中,在系统的输入受限且不稳定,系统的负荷及扰动变化较大等情况下,分数阶控制器能够保证系统的稳定运行。曾庆山等人在分数阶
控制器应用到非线性锅炉-汽轮机系统中,在系统的输入受限且不稳定,系统的负荷及扰动变化较大等情况下,分数阶控制器能够保证系统的稳定运行。曾庆山等人在分数阶 控制器上进行了进一步的研究应用,研究表明分数阶控制器的阶次对控制器的性能具有很大的影响。后续的研究中,又通过仿真,进一步验证了实际上分数阶
控制器上进行了进一步的研究应用,研究表明分数阶控制器的阶次对控制器的性能具有很大的影响。后续的研究中,又通过仿真,进一步验证了实际上分数阶 控制器对自身及系统参数的敏感度并不高[22]。
控制器对自身及系统参数的敏感度并不高[22]。
1.4分数阶控制器在永磁同步电动机中的应用
目前针对永磁同步电机的速度环控制,基于分数阶数学原理,设计指数型分数阶比例积分控制器,即(FO[PI])控制。FO[PI]控制器比PI控制器增加了一个可调参数 ,且在一定范围内对本身和被控对象参数的改变和外界干扰不敏感,所以对被控对象比PI控制器有更理想的控制性能。研究中,输入阶跃信号时,进行FO[PI]控制器的系统与采用PI控制器的系统仿真实验对比,结果表明:FO[PI]控制器速度跟随性能以及鲁棒性方面均要优于PI控制器。以PMSM为研究对象,针对PI控制器对系统被控对象的控制性能、抗扰能力较差等问题,把(FO[PI])控制器应用于电机的速度控制。由于该控制器比PI多了一个可调参数,所以能够更有效的控制被控对象,从而达到更好的控制效果。在设计过程中,一般将电流环等效成一阶惯性,速度环等效成典型二阶惯性环节,利用开环传递函数的相角裕度、截止频率和增益鲁棒性条件对FO[PI]速度控制器进行参数整定。分数阶的微积分算子采用脉冲响应不变离散化方法近似。在输入阶跃信号的情况下,与PI控制器比较其速度跟踪性能以及鲁棒性。
,且在一定范围内对本身和被控对象参数的改变和外界干扰不敏感,所以对被控对象比PI控制器有更理想的控制性能。研究中,输入阶跃信号时,进行FO[PI]控制器的系统与采用PI控制器的系统仿真实验对比,结果表明:FO[PI]控制器速度跟随性能以及鲁棒性方面均要优于PI控制器。以PMSM为研究对象,针对PI控制器对系统被控对象的控制性能、抗扰能力较差等问题,把(FO[PI])控制器应用于电机的速度控制。由于该控制器比PI多了一个可调参数,所以能够更有效的控制被控对象,从而达到更好的控制效果。在设计过程中,一般将电流环等效成一阶惯性,速度环等效成典型二阶惯性环节,利用开环传递函数的相角裕度、截止频率和增益鲁棒性条件对FO[PI]速度控制器进行参数整定。分数阶的微积分算子采用脉冲响应不变离散化方法近似。在输入阶跃信号的情况下,与PI控制器比较其速度跟踪性能以及鲁棒性。
2011年,史金光等人研究导弹制导的PMSM控制设计时,比较了分数阶 控制器与传统的PID控制器的控制性能,经研究得出的结论是分数阶
控制器与传统的PID控制器的控制性能,经研究得出的结论是分数阶 控制器具有更强的鲁棒性和抗干扰能力[23]。牛志嘉等人将混合动力汽车作为主要研究对象,将分数阶控制器应用到PMSM的控制系统中,通过仿真及实际应用比较了分数阶
控制器具有更强的鲁棒性和抗干扰能力[23]。牛志嘉等人将混合动力汽车作为主要研究对象,将分数阶控制器应用到PMSM的控制系统中,通过仿真及实际应用比较了分数阶 控制器与传统的PID控制器的控制性能,再次证明了分数阶
控制器与传统的PID控制器的控制性能,再次证明了分数阶 控制器的响应时间更短、跟随性能更好,同时可以使系统具有更强的稳定性和鲁棒性[24]。
控制器的响应时间更短、跟随性能更好,同时可以使系统具有更强的稳定性和鲁棒性[24]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: