基于云控制PLC针对老龄化和轮椅使用者 的智能家居电梯模块设计外文翻译资料
2022-12-09 10:28:55
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于云控制PLC针对老龄化和轮椅使用者
的智能家居电梯模块设计
Songkran Kantawong
Department of Electrical and Electronic Engineering
Faculty of Engineering Bangkok University, Rangsit Campus
Patumthani 12120, Thailand.
Email: songkran.k@bu.ac.th
摘要:本文旨在开发和实现基于可编程逻辑控制器(PLC)的云通信技术老龄和轮椅使用者智能家居电梯模块的新通用设计,系统具有通过模糊梯形图控制称为模糊PI的智能模糊控制方案。传统的家用电梯系统由传统的PLC控制,通常不方便老化和禁用乘客,因为他们的身体方式几乎被关闭或者被削弱。云控制的目的是为PLC提供远程计算资源的最新基础设施,并将其作为服务按需提供高度动态和灵活的长途访问控制。因此,云计算和通信技术可以被认为是这个家用电梯系统的有前途的解决方案用户友好的性能评估。本文提出了一种模糊比例加积分控制,旨在提高系统的总体性能,该系统主导作为从PLC梯形图控制修改的智能控制的作用。实验结果由家用电梯机构模块设计的实体模拟完成,数学实验室模拟程序对模糊PI控制进行评估。最后,所有的系统都在实验室进行真正的测试,可以很好地作为设计理念进行评估。
关键词:智能家居电梯;模糊PI控制;模糊控制;梯形控制;云计算PLC;老龄化和轮椅使用者;节点MCU
1.绪论
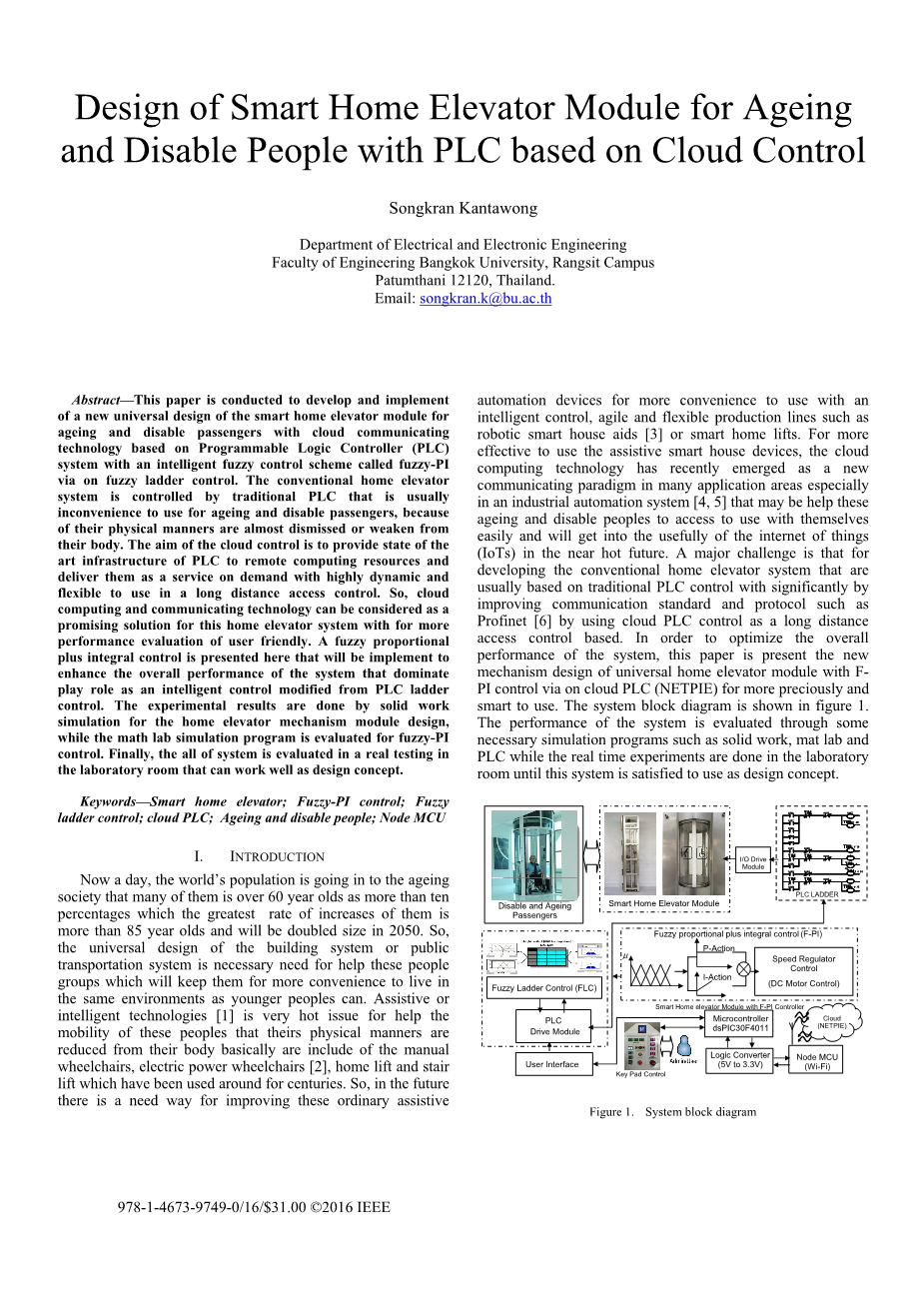
现在世界人口正在走向老龄化社会,其中超过60岁以上的人群比青少年比例高10%,在2050年,超过85岁比例将会是现在的双倍,所以,建筑系统和交通系统的建立对这些人是必要的,它帮助组将使他们更方便地生活在和年轻人一样的环境。辅助或智能技术[ 1 ]是非常热门的问题,帮助这些身体机动性减弱的人,包括手动轮椅,电动轮椅[ 2 ],家庭电梯和楼梯电梯已经使用了几个世纪。所以,在未来,提高使用这些辅助自动化设备的便捷性需要的智能的控制,敏捷灵活的生产线,如机器人智能住宅助手[ 3 ]或智能家庭电梯。云计算机技术作为一种新的在许多应用领域尤其是应用在工业自动化系统[ 4,5 ],更有效的辅助智能家居的使用。在将来可能会帮助这些老龄化和残疾人更加容易进去和使用对自己有益的物联网。一个主要的挑战是开发传统的家用电梯系统通常基于传统的PLC控制与显着改进通信标准和协议,如以太网 [ 6 ]利用云PLC控制作为一个长距离基于访问控制。为了优化整体系统的性能,本文提出了新的通用家居电梯模块的机构设计,通过PLC控制比通过PPI更。系统框图如图1所示。通过一些系统的性能进行评估必要的模拟程序,如坚实的工作,垫实验室和实时实验在实验室完成房间,直到这个系统是满意的使用作为设计理念。
图1 系统框图
本文的其余部分组织如下。 第二节介绍了家用电梯机械模块的设计。 第三节提出了采用云PLC控制系统的真正的家用电梯机械模块设计。 第四节描述用于模糊PI控制系统。 第五节说明了实验结果,最后说明了第六节的结论。
2 .家用电梯机械模块设计
2.1家用电梯机械模块
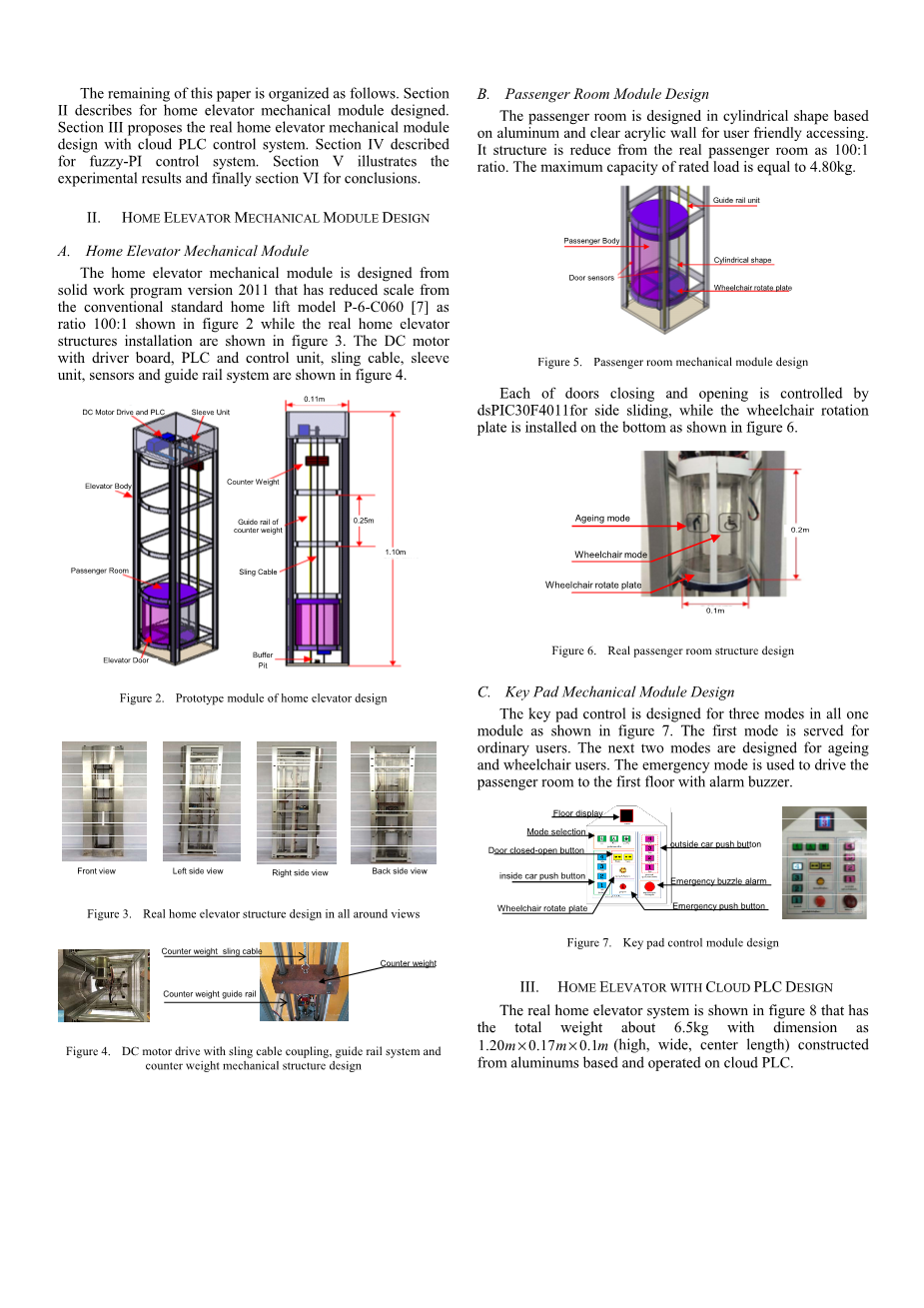
家用电梯机械模块由2011年实体工程计划设计,比传统标准家用电梯型号P-6-C060 [7]缩小了比例100:1,如图2所示。而图3中显示了实际的家用电梯结构安装 具有驱动板,PLC和控制单元,吊索,套筒单元,传感器和导轨系统的直流电机如图4所示。
图2.家用电梯设计的原型模块
图3 .真正的家用电梯各环节结构设计
图4.直流电机驱动,带吊索联轴器,导轨系统和配重机械结构设计
2.2客舱模块设计
乘客室设计为圆柱形,基于铝和透明的亚克力墙,方便用户使用。 其结构从真正的乘客室减少为100:1的比例。 额定负载的最大容量等于4.80kg。
图5.乘客室机械模块设计
每个门关闭和打开都由pPIC30F4011控制,侧面滑动,而轮椅旋转板安装在底部,如图6所示。
图6.实际客舱结构设计
2.3键盘机械模块设计
键盘控制设计为所有模块中的三种模式,如图7所示。第一种模式适用于普通用户。 接下来的两种模式是为老龄化和轮椅使用者设计的。 紧急模式用于将乘客室带到带有报警蜂鸣器的一楼。
图7.键盘控制模块设计
3. 家用电梯与云端PLC设计
真正的家用电梯系统如图8所示,总重量约6.5kg,尺寸为1.20mX0.17mX0.1m(高,宽,中心长度),由铝制而成,并在云PLC上运行。
3.1家用电梯机械结构设计
家用电梯系统由以下部分组成。 首先是一个电梯机械结构,由铝制构成,共有四层,顶层有主直流电机驱动,传感器。 第二部分是安装了用于所有系统控制的电池电源,PLC,dsPIC30F4011微控制器和节点MCU的控制箱。 最后,是可以作为远程遥控器访问的键盘控制。
图8.真正的家用电梯系统设计
3.2乘客关门控制设计
乘客门由具有直流步进电机和光子传感器的ds PIC30F4011控制,门检测将在门关闭时检测障碍物,并可再次打开以更安全地使用,如图9所示。
图9.使用dsPIC30F4011的乘客关门控制
轮椅旋转盘安装在乘客室的底部,并说明轮椅正在使用,如图10所示。
图10.轮椅模式下的乘客室设计
3.3可编程逻辑控制器设计
欧姆龙SYSMAC CPE1 PLC用于通过模糊梯形图控制由模糊PI控制进行评估的主电机驱动,而对该PLC的云控制由ds PIC30F4011和节点MCU与逻辑转换器连接,如图所示 11和12。
图11.具有欧姆龙SYSMAC CPE21的可编程逻辑控制器
图12.具有CX编程器9.2版的PLC梯形图设计
3.4云端PLC设计
云图PLC由图13所示,由ds PIC30F4011微控制器组成; 逻辑转换器,节点MCU [8]和NETPIE云系统。 NETPIE [9]是一个专门针对物联网应用开发的基于平台即服务(PaaS)的云平台, 这允许连接的设备通过安装微型齿轮库来相互通信。微控制器用于连接PLC和键盘控制,而节点MCU连接到NETPIE云进行长距离访问控制。
让输入信号时间间隔为,而输出时间间隔为,等式(1)中,表示延迟的影响。
(1)
在设置条件下,网络不完全同步,因此设备的周期更新时间为,为网络延迟,为PLC对每个进程执行的控制任务间隔时间加执行时间。 系统的端到端延迟是等式(2)中所示的,其用于和的最坏情况,这种延迟将导致方差每个输出命令的。
(2)
图13.基于云控制PLC方法和时序图序列
3.5与以太网节点MCU通信
节点MCU V1.0板基于ESP8266-12E Wi-Fi模块,该设备可以通过使用微型齿轮库直接连接到NETPIE云平台,用于ESP8266 Arduino。 以太网的通信过程是基于事件驱动的操作,它要求用户对每个事件进行特定的任务进行编程。 为了处理传入的消息,用户需要管理发生的事件以定义每个消息的操作,如图14所示。
图14. NETPIE中传入的消息处理示例
- 模糊比例积分(F-PI)控制器设计
基于PLC的电气控制系统中的模糊控制[10],特别是F-PI控制[11]的目的是相当简单,实际应用广泛,并且与传统PI控制器达成和保持相似的结果智能家居电梯系统的主要直流电机驱动的设置电压更加珍贵,目标快速,速度快,运行平稳,降低了特定状态下的稳态误差,与传统的线性PI控制器相比,具有更好的行为[12],因为的非线性模糊行为特征。但F-PI的主要问题在初始设定过程中发现,实际上不够好用。为了提高系统性能,有必要通过模糊控制器[13]对初始设置过程进行调整,也可以使用更稳定和鲁棒性[14]。在经典PID控制器中,初始设定参数由试验和误差变化,或者通过一些已知规则(如齐格勒和尼科尔斯法)大致调整。在本文中,使用系数图方法(CDM),其可以在瞬态和稳态响应中给出良好的控制器性能,而控制器的顺序通常小于系统,之后可以再次找到微调值直到这些值收敛于稳态目标,更实用。
4.1直流励磁绕线电机的传递功能
直流励磁绕组电机和电梯模型系统的等效电路如图15和16所示,可以通过下列等式中的数学分析表达。
(3)
(4)
在为电源电压的情况下,是从磁场电流和为电压常数的旋转磁场磁场产生的反电动力。 电动机转矩和负载转矩由其耦合在同一轴上并将电力和机械功率之间的发射功率与效率系数的 = 0.95相关联的关系推导出来。
(5)
(6)
(7)
当摩擦损耗常数等于B时,J为电流密度,M为车体重量,m为配重,为张力,是套筒的半径,是电机的转速。当,电压和电动力常数可以通过测功机的实验室测试发现,其中是角速度达到零速度时的转矩,因此导出简单的电机转矩,是齿轮比,是负载加速度。在额定转速为3500rpm的24VDC电机齿轮的情况下,与吊索的转向齿轮箱的联轴器可以将传动比为35:1,因此本家电梯的实际速度等于100rpm。在满载重量等于10kg的情况下,该电梯的全悬挂力可以为8.393N,输入电机功率为,输出电机功率,电机转矩和满载电流主电机驱动的,。电动机效率。
图15.直流励磁绕组电机的等效电路
图16.电梯系统的等效数学模型
4.2混合模糊PI控制器设计
F-PI控制器由常规PI控制器作为并联组合电路或称为混合电路创建。
具有以下步骤的设计过程概念。
1)构建和微调常规PI控制器。
2)用模糊控制器的等效线性替换它。
3)将模糊控制器作为非线性模糊控制器。
4)利用实验结果微调混合模糊PI控制器,实际调整实际使用。
对于传统参数,分配给用于闭环传递函数控制,如图17所示。
图17.混合F-PI控制器结构设计
F-PI的两个语言模糊集被设计用于Max-Min干扰法中Mamdani的梯形和三角形隶属函数。 输入错误被分配为来自输入和输入之间的比较的e(t)过程的输出,而错误的变化被分配为。 一般模糊集被分配为负大(NB),负小(NS),零(Z),正小(PS)和正大(PB)。
表1基于F-PI规则的系统设计
干扰方法与隶属函数的Max-Min一起使用。 单例用于验证模糊隶属函数的顶点,而使用重心(COG)方法去除模糊化。
4.3具有CDM设置方法的混合模糊PI控制器
CDM传递函数在等式(8)中进行评估。
(8)
其中是的稳定指数,是时间常数,是稳定标准。 对于在未确定的系数项中的常规PI和CDM之间的比较是逐步计算的。 找到诸如和的总参数,这些初始参数已经针对多个系统时间响应进行了测试,以寻找最佳初始值,百分比过冲可能不超过5%(%POle;5%),因此微调值的三个重要参数是在实验室进行测试的。
- 实验结果
智能家居电梯系统的性能通过Pentium(R)4 CPU 3.01 GHz,数学实验室模拟,2010年实体模拟版本和CX编程器9.2版进行评估。 数学分析,数据计算和实验测试如下。
表2 系统组件的规格
表3 将智能家用电梯PLC和F-PI的结果与云模糊梯形控制
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[27768],资料为PDF文档或Word文档,PDF文档可免费转换为Word



