基于模糊免疫PID算法的直流伺服电机控制器的设计外文翻译资料
2022-12-03 11:44:34

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(设计)
英文翻译
原文标题 The Design of the DC Servo Motor Controller Based on Fuzzy Immune PID Algorithm
译文标题 基于模糊免疫PID算法的直流伺服电机控制器的设计
2017年7月26-28日,中国大连。
基于模糊免疫PID算法的直流伺服电机控制器的设计
Haoshui Sun,Xiaoguang Wang,Qinying Lin,Xiaoping Wang*,Saiyu Su
Engineer College of Aeronautics and Astronautics,Air Force Engineering University,Xirsquo;an 710038,China
摘要:传统的参数不可调PID控制器的动态响应较差,在处理不确定参数、非线性、宽输入系统时,输出不能快速、准确、稳定地跟随输入。目前主流的自转算法由于体积大、实时性强,难以移植到嵌入式平台。提出了一种基于传统PID控制器的模糊免疫PID算法,实现了PID参数随电机转速值的自整定。针对比例参数,根据人体免疫系统的机理进行了调整, 并采用模糊算法对其非线性部分进行了逼近。针对积分和导数参数,采用模糊算法直接实现了自调整。最后,利用MATLAB仿真平台对整个算法的有效性进行了验证。完成了基于ST半导体制造的STM32控制器的硬件设计, 并进行了速度跟踪实验。当伺服电机被给予60 r/分钟和360r/分钟的速度输入,响应时间在130ms以内,超调量低于0.5%。在外部扰动情况下,速度波动值在0.2%以内。然后将控制器应用于全范围机箱,并以高精度进行了控制。仿真和实验表明,该控制器具有良好的动态和静态性能,能有效地控制伺服电机。
关键词:伺服电机,PID控制,模糊免疫算法,STM32
1、介绍
直流伺服电动机具有可靠性高、成本低、速度、位置控制简单、能耗小、体积大、与数字兼容好等优势,广泛应用于移动机器人底盘和机械手的控制中[1]。全方位移动平台在平面上具有三自由度,可以实现纵向平移、横向平移和自身旋转运动,并具有灵活性[2],因此它被广泛地应用于小而复杂的空间中。然而,全方位的移动平台要求高精度的运动控制,这就 需要精确的控制底盘电机马达。在电机控制算法中,PID算法具有简单、可靠、易于实现等优点得到了广泛的应用。然而,对于传统的参数不可调PID算法,其参数整定过程比较困难,其系统响应范围广,特别是面对电机等多变量非线性系统时,系统的稳定性较差。会出现响应慢、超调量大、无法实现精确控制的问题。为了提高PID控制器的控制效果,许多学者进行了大量的相应工作,提出了遗传PID算法[3]、BP神经网络PID算法[4]、RBF神经网络PID算法[5]、自适应PID算法等一系列方法。这些算法虽然取得了很好的控制效果,但大多是基于PC平台,它们的系统复杂,且计算量大,需要大量的数据来支持参数整定过程,但不能移植到低成本、低功耗、体积小的嵌入式控制系统中;目前,嵌入式系统大多采用分段积分PID算法来克服传统算法的缺点,但在参数整定方面也存在困难,而且在分割点的控制效果较差。
针对上述问题,本文提出了一种模糊免疫PID算法。通过免疫算法对比例系数进行了自整定。并利用模糊推理对积分系数和导数系数进行了自整定。通过基于MATLAB/Simulink仿真平台的仿真结果达到了预期的控制效果。在此基础上,利用STM32芯片制作了控制器硬件,并将该算法移植到了芯片上。在硬件平台上进行速度跟踪实验,进一步验证了算法的控制效果。
2、控制器的算法设计
2.1 免疫比例控制器
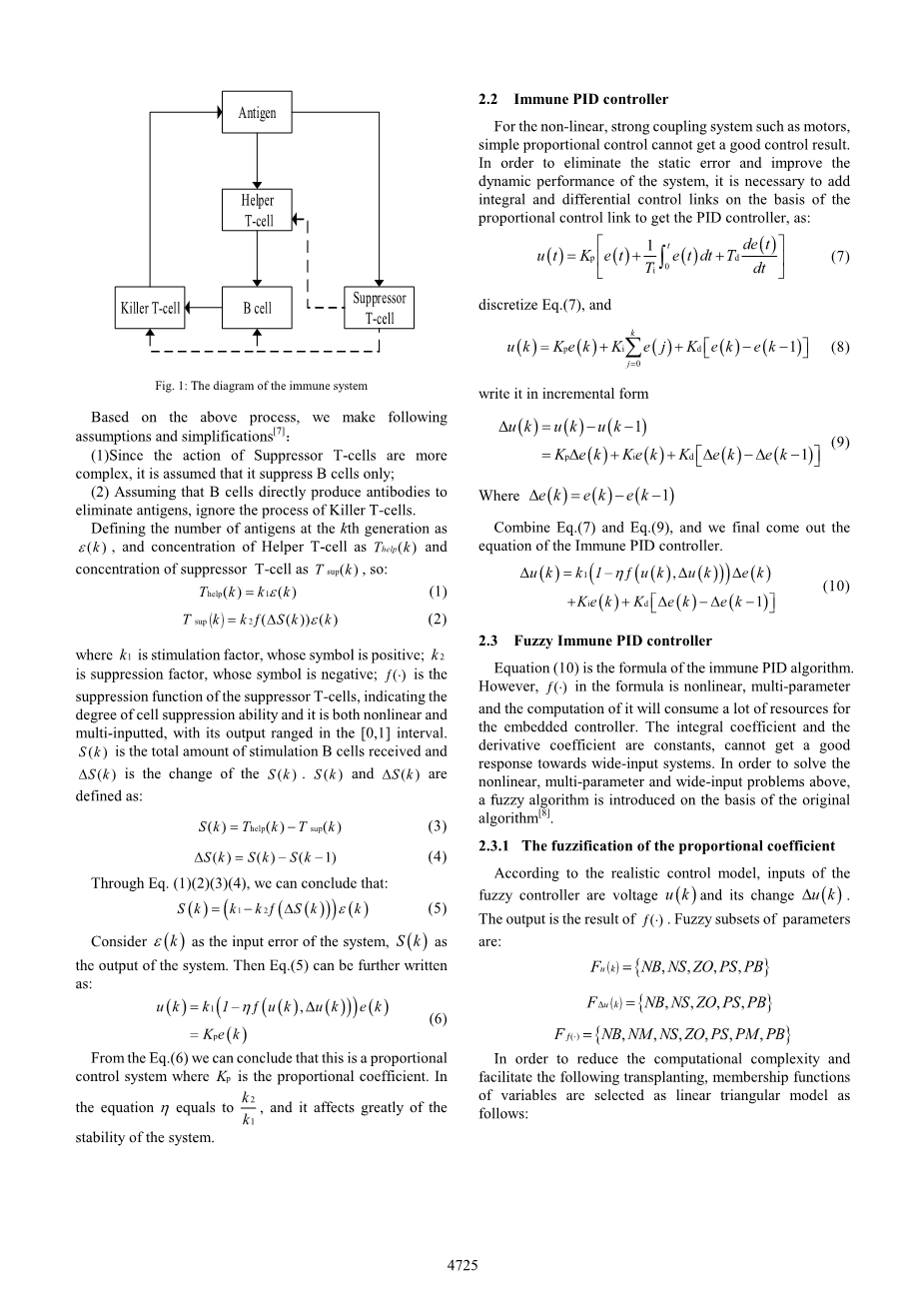
人体的免疫过程被简化为:人体受到外部抗原的侵袭,从而激活了帮助T细胞和抑制性T细胞。辅助性T细胞激活B细胞,B细胞刺激杀伤T细胞产生抗体以消除相应的抗原;同时,抑制性T细胞将抑制所有其他免疫细胞,即T细胞、B细胞和杀伤T细胞。这个过程一直持续到抗原被完全消除[6]。上述过程可以抽象理解为,系统主要有两个反馈过程,即抗原激活相应的免疫细胞、免疫细胞清除抗原和抑制T细胞被激活以抑制其他免疫细胞。
图1:免疫系统的图解
基于上述过程,我们进行以下假设和简化[7]:
(1)由于抑制性T细胞的作用更为复杂,推测其仅抑制B细胞;
(2)假设B细胞直接产生抗体以消除抗原,忽略杀伤T细胞的过程。
将kth代抗原的数目定义为,帮助T细胞的浓度定义为,抑制性T细胞的浓度定义为,因此:
(1)
(2)
其中k1是刺激因子,它的符号是正的;k2是抑制因子,它的符号是负的;是抑制性T细胞的抑制函数,表示细胞抑制能力的程度,它是非线性和多输入的,其输出范围在[0,1]区间内。是接受刺激B细胞的总量,是的变化。和的定义为:
(3)
(4)
通过方程(1)(2)(3)(4),我们可以得出以下结论:
(5)
考虑作为系统的输入误差,作为系统的输出。则方程(5)可进一步写成:
(6)
从方程(6),我们可以得出结论,这是一个比例控制系统,其中Kp是比例系数。在等式中eta;等于,它对系统的稳定性有很大影响。
2.2 免疫 PID控制器
对于电机等非线性强耦合系统,简单的比例控制无法取得良好的控制效果。为了消除系统的静态误差,提高系统的动态性能,有必要在比例控制环节的基础上增加积分和微分控制环节,得到PID控制器如下:
(7)
展开方程(7),得
(8)
以增量形式写入,得
(9)
当
结合方程(7)和方程(9),我们最后可以得出了免疫PID控制器的方程式:
(10)
2.3 模糊免疫 PID控制器
方程(10)是免疫PID算法的方程。但是,该方程中的是非线性的、多参数的,它的计算会消耗嵌入式控制器的大量资源。积分系数和导数系数是常数,对宽输入系统不能得到良好的响应.为了解决上述非线性、多参数和宽输入的问题,在原算法[8]的基础上,提出了一种模糊算法。
2.3.1 比例系数的模糊
根据实际控制模型,模糊控制器的输入为电压及其变化,输出为,参数的模糊子集为:
为了降低计算复杂度,便于以下移植,将变量的隶属函数选择为线性三角形模型,如下所示:
- u(k)和△u(k)函数的隶属度
- f(.)函数的隶属度
图2:隶属度
根据免疫系统的控制经验,可以得出相应的控制规律[9-11]:
表1 免疫系统的模糊规则表
2.3.2 积分和微分系数的模糊化
为了消除系统的静态误差,提高系统的动态性能,适应宽输入系统,还对系统的积分系数和微分系数进行了模糊化处理。对于这种模糊控制器,输入是误差值的速度及其变化,输出的是积分系数和微分系数的变化。它们的模糊子集是:
对于它们的隶属函数,三角形模型的选择与和相同。
根据PID控制器的控制经验,可以得到模糊规则表下面[12-13]:
表2 I参数的模糊规则表
表3 D参数的模糊规则表
通过模糊控制器,得出了积分系数和微分系数的变化。具体的积分系数和微分系数可以通过以下方程得到:
(11)
(12)
其中是积分系数的初值,是微分系数的初值
结合模糊免疫比例控制器和模糊积分、导数控制器,给出了免疫模糊PID算法的流程图如下:
图3:模糊免疫算法的总流程图
3、基于MATLAB/Simulink仿真平台的模拟
该系统在MATLAB/Simulink仿真平台上进行了仿真。根据电流方程和伺服永磁直流拉丝电机的力矩平衡方程,可以得出作为第二级系统[14-16],其传递函数如下:
(13)
=
这里:
J 是转子回转惯性;
K 是电机扭矩系数;
L 是电机电感;
b 是电机粘性摩擦常数;
R 是马达电阻。
在硬件实验中,采用了上海着陆行星变速箱有限公司生产的P36H SYK 36行星齿轮马达。将其相应的参数替换成方程(13),我们可以得到近似传递函数:
在仿真过程中,给出了60r/分钟和360r/分钟作为输入信号。分别对模糊免疫PID算法、常规PID算法和分段PID算法进行了仿真。生成的输出曲线如下所示:
图4:三种算法的输出数字
从输出曲线上来说,在宽输入范围内,模糊免疫PID算法的输出跟随性很好,速度的突然变化不会产生明显的超调量,响应迅速快;传统的PID算法在速度响应上存在一定的超调量,响应时间相应的会更长;分段PID算法不产生任何超调。然而,它的响应时间比模糊免疫PID算法要长得多。因此,该模糊免疫PID控制器比传统的PID控制器具有更好的动态响应特性。
- 基于硬件平台的实验研究
在完成仿真工作后,设计了基于STM32F103C8T6的控制器。控制器的硬件结构如下所示:
图5:控制器的硬件结构
图6:控制器的实拍图
为了控制不同类型的电机,更好地监控电机的运行状态,设计了一个基于.NET框架的 PC程序。PC机与控制器通过USART进行通信,实现了参数的设定、电机的实时监控和运动曲线的分析。
首先是电机在空载条件下的闭环速度控制,其响应曲线如下。
(a)模糊免疫PID算法的输出曲线
(b)常规PID算法的输出曲线
从以上面的曲线可以看出,模糊免疫PID系统的输出在空载条件下可以快速跟踪输入。响应时间为121ms,超调量为0,满足全方向平台控制的实时性和精度要求。而传统的PID系统具有大量的超调量,响应时间也慢得多。如果用于全方向平台的控制,可能会出现更大的错误。
在实际工作条件下,底盘电机通常在满载条件下运行,有时甚至在启动或紧急制动期间的过
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21641],资料为PDF文档或Word文档,PDF文档可免费转换为Word



