模拟基于SVPWM的FOC感应电机驱动外文翻译资料
2022-11-11 15:04:12

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
模拟基于SVPWM的FOC感应电机驱动
Deepak Ronanki,Rajesh.K和Parthiban.P,IEEE成员
摘要 电流源逆变器(CSI)的应用感应电动机(IM)驱动器提供了许多优点,包括升压能力,自然直通短路保护和正弦电压的产生。 在本文尝试对CSI馈电IM驱动进行建模呈现。 数学模型考虑到了逆变器和感应电动机动态特性,并在中建立静止参考系。 为了控制驱动速度,提出了直接场定向控制(FOC)。 反击在极低速度下转子脉动的影响和转子电阻变化,包括滑移角补偿回路控制定律。 CSI饲料的分析表达式具有直接FOC的IM通过使用MATLAB / SIMULINK来导出和验证。
索引术语 CSI,直接FOC,感应电机,MATLAB,SVPWM。
1.引言
在所有类型的机器中鼠笼式感应电机最常用于低和中等功率(lt;160kW)变速驱动器[1]。 鼠笼感应电动机结构简单,经济,坚固,可靠,并且在宽功率范围内可用[1]。除了传统的工业驱动器,即泵,风扇,起重机,自动化驱动器,目前使用的感应电动机混合动力电动车辆(HEV)和电池供电的电动车辆车辆(BEV)提供高性能的扭矩控制[2]。 在风能系统领域,在过去十年中,鼠笼式感应电机越来越多用于多级齿轮小型风力发电系统(lt;100kW),背靠背转换器连接到电网。
一般来说,两组电源转换器拓扑可应用于变速IM驱动:VSI(电压源极反相器)和CSI(电流源反相器)。 如今,电流调节PWM VSI为高性能ac由于电路成本的原因,驱动器优于CSI低,控制简单,电流环路宽带宽。 然而,它有缺点,如弱点臂短路故障和由于脉冲宽度的高dv / dt逆变器的调制电压和声学噪声。 该dv / dt可能导致电机的绝缘劣化即使可以通过消除噪声高开关频率(gt; 1MHz)。 此外,由于VSI不保持再生能力,动态制动电路必须补充。
应用高开关频率(gt; 20 kHz)硅(Si)功率晶体管(IGBT和RB-IGBT)[3] - [5]最近,应用了高开关(gt; 100kHz)碳化硅(SiC)器件(SiCJFET)和SiC二极管)[6] - [7]具有巨大的影响基于CSI的系统应用和创造新的可能性。 随着开关频率的增加DC链路电感器的体积显着减小。此外,输出滤波电容器的体积减小取得VSI DC链路电容器的分数值。 该SiC器件提供高阻断电压的可能性和低导通电阻,这是其关键参数CSI。
通常使用CSI馈电感应电动机驱动器在高马力可调速应用。 许多已经提出了用于控制运动的策略CSI馈电感应电机驱动; 仅举几例,滑动控制,同步控制,角度控制,磁场定向控制和其他。 设计一个高性能计算机有几个要求,性能CSI感应电机驱动:速度响应必须平稳,无齿槽或扭矩低速脉动; 速度反转平稳下装载条件; 驱动系统具有对称的四个象限操作; 并且系统处于恒定全转矩操作低于额定转速和恒定马力在低于额定转速的情况下运行。 之间许多提出的控制方案,面向场控制有成为设计中最有效的技术之一高性能CSI馈电感应电机驱动器。
有几种调制技术应用于CSI,包括梯形脉宽调制(TPWM),选择性谐波消除(SHE)和空间矢量调制(SVM)。 与TPWM和SHE,SVM相比提供更多的控制灵活性和更好的动态性能。
本文提出了IM的数学模型,SVPWM,FOC和CSI。 上面提到的所有数学模型在中实现
MATLAB / SIMULINK只使用基本的Simulink块。
2.CSI FED电感的估计和建模电机驱动
图1 示出了六端子电路的主电路配置,开关三相CSI。 该逆变器包括恒定DC电源,将DC电力转换为的逆变器部分可变电压频率交流电源和感应电机在负载侧。 此外,三个电容器连接到交流端子以吸收过电压其在电流被切断时发生。 过电压吸收电容器,其连接到AC端子作为滤波器,因此输出电流有一个正弦波形。
图 1. 广义六开关三相CSI
A.感应电机的数学模型
感应电动机的模型由三相组成到两相变换方程,机电方程和负载动力方程。 考虑三个在三相中施加相位正弦电流定子绕组,给定为
(1)
(2)
(3)
三相电流源变换为两相即abc至d-q转化。 相位的电流方程变换如下:
(4)
(5)
(6)
其中是转子电路时间常数。 方程(5)和(6)给出转子磁通作为定子电流和的函数速度。 因此,知道这些信号,通量和可以估计对应的单位矢量信号。 该机电块配置是基于以下等式。 与转子电压矢量正常假设为零,励磁参考中的转矩方程为表示为
(7)
负载动力学块基于以下等式
(8)
从方程(9),转差频率可以计算并反馈到机电块中
(9)
其中和是d,q轴通量联系; amp; d,q轴电流;是相之间的互感;是转子电感; P不是极点;为负载转矩;是机械速度;是惯性矩发动机;是负载的转动惯量。
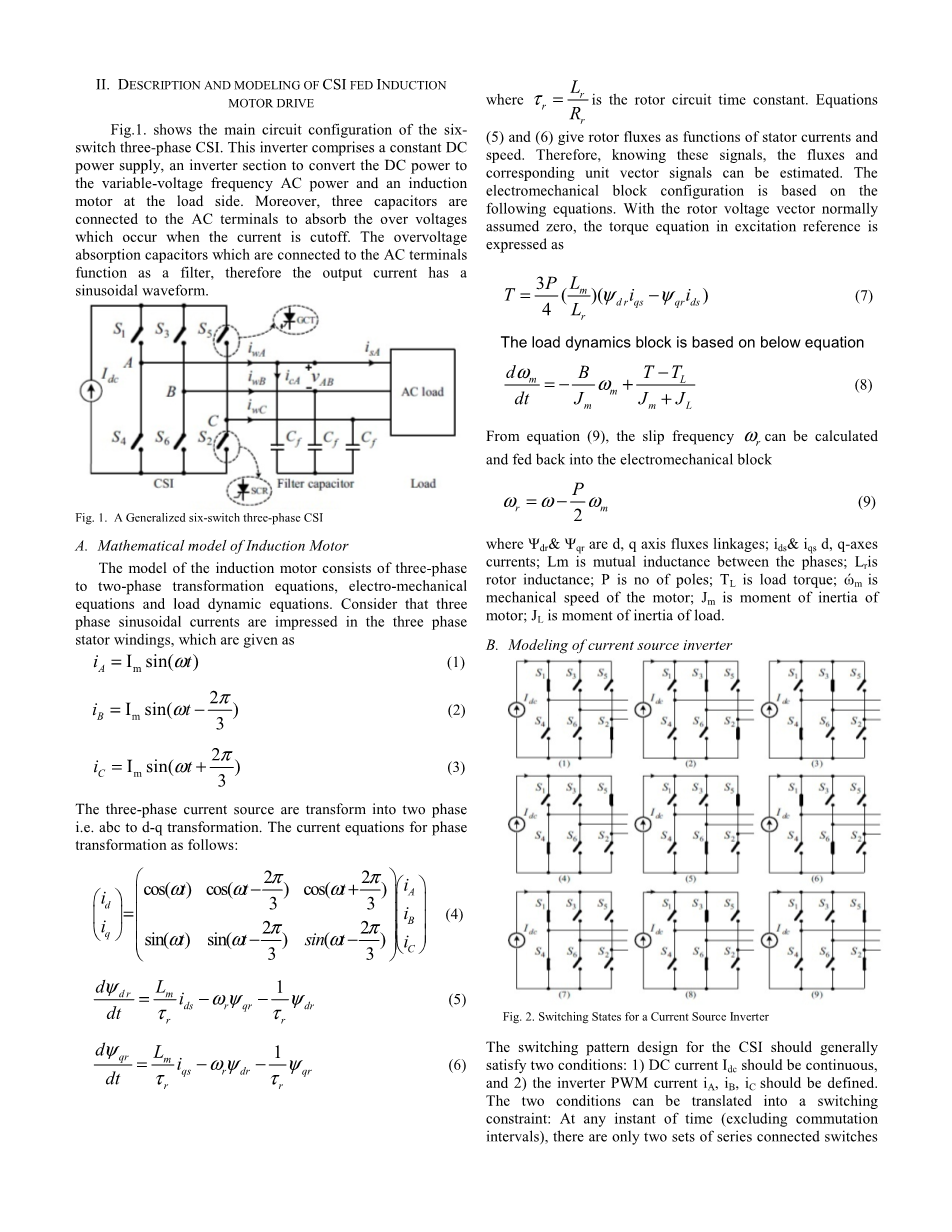
B.电流源逆变器的建模
图2 电流源逆变器的开关状态
一般来说,CSI的切换模式设计满足两个条件:1)直流电流I dc应连续,和2)应定义逆变器PWM电流,,。这两个条件可以转换为切换约束:在任何时刻(不包括换向
间隔),只有两组串联连接的开关导电,即,一组设置在桥的上半部中,例如在图1和其他在桥梁的下半部如。 开关S m的开关功能定义为
(10)
如果以下方程式满足切换约束条件保持良好
(11)
从开发的32个开关状态中有九个方程11。 生成给定的一组交流线路电流波形,逆变器必须从一个状态移动到另一个状态。因此,所得到的线电流由离散值组成电流,其为,0,。 按顺序选择状态以产生给定的波形是通过调制完成的技术,应确保只使用有效状态9。这些有效的9种状态如图2所示。 CSI输出三相电流,和是DC-链路电流和开关函数g = [,,,,,]如下:
(12)
从等式(12)建立CSI的建模MATLAB / SIMULINK。
- D感应电场方向控制电机转动
FOC的本质是解耦控制的转子磁通和电磁转矩这两个变量分别控制。感应电动机由电流控制空间馈电矢量调制逆变器。 比较电动机速度omega;参考值和误差由速度处理控制器以产生扭矩指令。 块图3给出了变速感应电动机驱动使用场定向控制。计算定子正交轴电流参考从(13)中给出的转矩指令
(13)
其中是转子电阻,是互感和是由(14)给出的估计的转子磁链
(14)
其中是转子常数。 定子直轴电流参考从转子磁通基准获得输入如下
(15)
图3 基于SVM的IM信号驱动FOC的框图
坐标所需的转子磁通位置转子从转子速度和产生
(16)
滑差频率由定子参考值计算电流和电动机参数(17)
(17)
和电流参考被转换为相位电流参考,和,然后作为输入SVM块。
- 空间矢量脉冲宽度的建模调制
- 空间电流矢量
复数符号中的空间电流矢量由下式给出
(18)
其中PWM CSI使用六个单向开关将直流电流源连接到负载。 二开关在两个不同的腿,一个在上开关桥(; ;),另一个在图1的下开关桥中允许在任何时刻进行。 注意到那里应始终在CSI中存在当前路径。 如果不是,高在开路端子处的电压被感应,使得开关可能销毁。 CSI只能产生六个有效空间向量和三个零向量。 零向量意味着同一臂中的上开关和下开关都导通状态。 示出了空间电流矢量在图4中
图4 电流源逆变器的空间矢量图
SVM块的主要功能是产生六个开关脉冲到CSI逆变器的六个开关,使得期望的相电流。 SVM块的输入为三个参考电流,和和DC链路电流。
(19)
该变换可以与三相电流一起使用与三相六开关电流源相关逆变器。 从中我们可以计算,如下
(20)
(21)
B.停留时间计算
停留时间计算基于安培秒平衡原理,即电流参考的乘积矢量和采样周期的和等于电流矢量乘以所选空间的时间间隔载体。假设采样周期足够小,可以考虑电流参考矢量常数。 所以可以认为在期间是恒定的。因此,可以由两个相邻的有效矢量,和零矢量。 以确保产生的电流在一个采样周期由所提供的电流组成在时间,和期间使用的矢量,和接通平均等于电流参考矢量的停留时间可以通过
(22)
(23)
(24)
其中是调制指数,是峰值(,和)的基频分量的值,n是扇区数。
表一 开关状态和空间矢量
C.切换顺序
CSI的PWM切换模式必须满足a约束,即,只有逆变器中的两个开关任何一个导通时间瞬间,一个在CSI桥的上半部和另一个在下半部分。在这个约束下,三相逆变器共有九种开关状态,如表一所示。这些开关状态可以被分类为零开关状态和活动开关状态。有三个零开关状态(14),(36)和(52)。零状态(14)表示逆变器相臂A中的开关和同时导通其他四个开关变频器关闭。直流电流源通过,导致== = 0。这种操作模式经常称为旁路操作。有六个活跃开关状态。状态[12]表示支路A中的开关和脚C中的为ON。直流电流流过,负载,然后回到直流电源,得到=和 = 。其他五个活动状态的定义见表一。
表二 CSI调制技术的比较
- 仿真结果和讨论
CSI调制技术的比较在图中示出表二。 CSI感应电机的直接FOC方案驱动已经在MATLAB /SIMULINK中模拟。该仿真参数见附录。该直流电流,电机电流,参考的模拟波形扭矩,估计扭矩,参考速度和实际速度如图5-图9所示。 模拟执行两个不同情况。 在情况一不同参考速度的情况下恒定负载转矩和具有不同负载转矩的情况二以恒定的参考速度。
情况一:在这一节中感应电动机的行为在两个参考速度。 当=20A,= 3,= 0.000004。 在0.2秒时施加不同的参考速度。对于这种情况,模拟波形如图5-图7所示。图5显示了变频器输入直流电流的波形和电动机输入,即相A的定子电流参考速度和实际速度的波形电机当=130 rad/sec时。 图7显示当=110 rad/sec时,电机的参考速度和实际速度的波形。
图5 逆变器输入(直流电流)和输出(定子电流)
图6 电机的参考速度和实际速度的波形当=130 rad/sec时
图7 电机的参考速度和实际速度的波形,当 =110 rad/sec时
情况二:在本节中感应电机的行为观察到两个不同的负载转矩。 当 = 20A时, = 3, = 0.000004。 两个不同的负载转矩施加1.2秒。图8示出了波形当为10N-m时,电机的参考扭矩和实际扭矩。 图9显示了参考波形的波形当为5N-m时,电机的参考转矩和实际转矩。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137754],资料为PDF文档或Word文档,PDF文档可免费转换为Word



