采用数字PWM技术对基于FPGA的无刷直流电动机和发电机的控制稳定性分析外文翻译资料
2022-09-06 11:22:03
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
采用数字PWM技术对基于FPGA的无刷直流电动机和发电机的控制稳定性分析
摘要:无刷直流(BLDC)驱动器已收到显著注意,由于无刷在商业,住宅和工业应用具有高效率,电磁干扰,以及高机械可靠性。在发电模式,它们非常适合应用在小型风电和水电发生器,以及在集成启动发电机的混合动力电动汽车中。本文探讨了BLDC驱动在电动机和发电机模式下的数字脉宽调制控制。这种控制策略简单健全,无需电流传感器,并且计算不密集。由于这些属性,该技术可以在低成本的现场可编程门阵列上实现。本文调查因处理器能力的降低在各种条件下控制的简单负载扰动引起的潜在稳定性问题。Lyapunov稳定性标准已经用于分析闭环系统稳定性。此外,一个近似的离散模型已经开发,并分析了系统的稳定性,以确保根据各套负载,速度和输入电压闭环工作。仿真和实验结果已经呈现来验证要求。
关键词:无刷直流(BLDC)驱动器,数码管,脉冲宽度调制(PWM)控制,稳定性分析。
I.介绍
随着全球每年超过50亿电机的建成,电力驱动已经成为工业厂房的一个组成部分[1]。一般的的住宅和商业应用趋向于使用常规电机驱动技术,如单相感应或有刷直流电机。然而,这些机器的特征是低效率和高维护,个别除外[2]。过去十年在农村和城市地区,使用风能和水力发电的变速发电机进行可持续能源生产也在逐渐增多[3]。
在可用的不同机器配置中,无刷直流(BLDC)的机器已被视为有力竞争者。这是由于多种原因,包括更高的高效,稳健的运行,降低维护和更高机械可靠性,因为它们都没有电刷。用于三相BLDC机的控制策略通常由使用双极晶体管(IGBT)和MOSFET的绝缘栅的功率转换器来实现。为了以执行所需的操作产生适当的控制信号时,一个专用处理器或可编程逻辑器件通常是必要的[4]。虽然专用处理器具有较长的开发时间,但是它也可以作为一个紧凑的解决方案,而且通常更便宜。这样的系统可以减少该系统的总成本,并且不损失性能。然而,在BLDC驱动策略的复杂性要求具有高计算能力的微控制器执行五花八门的控制算法,如
比例-积分或比例-积分-微分调节环路。此外,复杂的控制策略(用BLDC电流/速度调节)有时会对参数变化,磁饱和,未建模的扰动等因素敏感,这使得整个系统不太可靠[5]。
对于应用于国内家电或简单的工业应用的BLDC驱动器,其中运行参数的变化并不频繁,需要利用简单的硬件,不需要大存储器或处理能力的低成本的控制策略。这些低成本的宽转速范围BLDC驱动器非常适合于在四象限运行,可再生能源和混合动力汽车的应用也是如此。此外,对于飞轮(为大型风力发电机组的一部分)数字控制策略可被用作具有成本效益的解决方案,其中工作在两个象限数字控制的能力能全部实现[6]。
一个健全的数字控制策略的发展的主要因素是它的稳定性,当驱动器在工作状态下突然变化,如负载转矩的变化,变速请求等。这类似于滑模控制,这里的关键问题实际上是在负载[7]。虽然滑模控制对马达参数变化不敏感,但其正常运作的稳定性有待验证[8],[9]。
这里所提出的控制策略,把电动机作为数字系统。换句话说,控制器选择高占空比或低占空比状态基于所计算出的速度误差。调速是通过这两个预定义的状态之间交替来实现。由于它的简单性,这种控制策略很容易实现到DSP或一个现场可编程门阵列(FPGA)[10]。它也不需要使用任何额外的硬件,这使得它对于大多数应用是一个有吸引力的解决方案。随着处理器容量最小化和反馈机制,有必要验证此策略在需求负荷转矩和速度分布突然变化的反应能力。本文提出了一种在电动机和发电机模式下闭环BLDC驱动器操作数字脉冲宽度调制(PWM)控制策略的综合稳定性分析来解决这个问题,并可作为在工业,家庭和分布式发电系统中适应性的一个案例。
离散时间系统的稳定性分析可以使用两种不同的技术。其中之一是直接稳定分析z域,如陪审团评定法和舒尔-科恩标准。其他包括用于连续的时间系统技术,包括李亚普诺夫标准[11],[12]。在本文中,一个闭环系统下的稳定性分析是在变化的负载转矩和变化的输入电压下进行的。
II.采用数字PWM控制直流无刷机的调速
对于不要求高度精确控制的应用,仅霍尔效应传感器被用于为功率开关产生开关信号。这样的驱动器有多种用途,从几瓦到几千瓦,例如水/油泵,鼓风机,搅拌机,输送带等[13],[14]。在对驱动器性能要求很高的应用程序中,通常采用编码器,而不是霍尔传感器。像这样的驱动器有一个例子就是集成起动机/交流发电机,用在汽车或四象限BLDC变频器来推进混合/电动车辆[15],[16]。
近年来,分布式发电系统的快速发展已经导致几种先进变速发电机的控制策略的发展。可再生能源的应用,主要是微水电和风能,以及汽车,是这样的系统中常见的例子。变速发电机通常执行在更宽的运转区域,能够更好地利用机器,以及高效的能量转换。
水轮机被认为是标准的功耗-速度特性反应的电机,如图4。在这个系统中,涡轮机和驱动被设计成在最大输出功率的速度下运行。涡轮机速度的任何变化可导致输出功率降低。因此,控制发电机的速度是很重要的[17]。在[18]的作者描述了不同的“头”和轴的速度下水力涡轮机的功率特性,表明涡轮的效率在一个给定的轴速度下也有一个最大值。类似地,对于风力涡轮机应用,变速永磁(PM)发电机都非常适合独立的单位或风力发电场。涡轮功率,相较于不同风速转动速度示于图4[19],[20]。从图中,可以看出,由发电机输送的功率取决于涡轮机的旋转速度,仅在一个操作点有最大值。
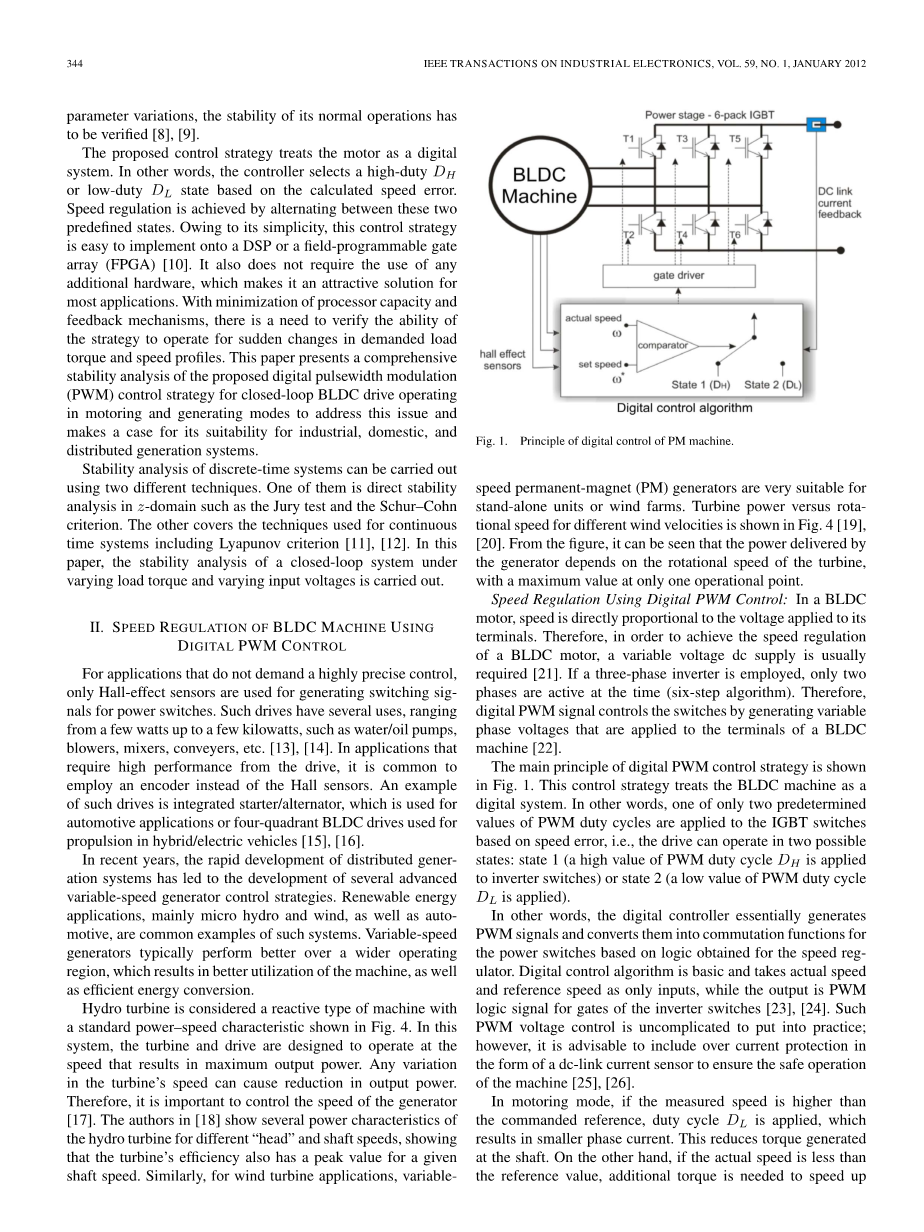
图1-永磁电机的数字化控制的原则。
数字式PWM主控控制速度:在BLDC电机,速度与施加到其端子的电压成正比。因此,为了实现一个BLDC电机的速度调节,通常需要可变电压直流电源[21]。如果采用三相逆变器,只有两个相是在同时刻活动(六步算法)。因此,数字PWM信号通过被施加到BLDC电机的端子变量相电压控制开关[22]。
数字PWM控制策略的主要原理示于图1。这种控制策略将BLDC机作为数字系统。换句话说,只有两个预定的PWM占空比的值中的一个基于速度误差施加到IGBT开关,即驱动器可以在两种可能的状态进行操作:状态1(PWM占空比的高值被施加到逆变器开关)或状态2(PWM占空比的低值被施加)。
换言之,数字控制器本质上是生成PWM信号,并将其转换成基于速度调节器逻辑的电源开关的换向功能。数字控制算法是基本的,并以实际速度和参考速度为输入,而输出是逆变器开关栅极的PWM逻辑信号[23],[24]。这样的PWM电压控制付诸实践并不复杂;然而,最好是以加入一个直流母线电流传感器形成过流保护,确保机器的安全运行[25][26]。
在电动模式,如果测得的速度高于参考值,占空比被施加,这将导致更小的相电流。这减少了在该轴产生的扭矩。另一方面,如果实际速度小于参考值时,需要额外的转矩,以加快电动机系统,施加占空比来保障PWM较高值。和的值是固定的不随时间变化的常量。唯一的变量是在某一瞬间,占空比被施加,导致电机轴加快或减慢。
对于BLDC发电机,在此技术中相反逻辑可以用来选择占空比高值和低值。如果发电机速度需要降低,需要施加更高的占空比施加,使原动机的相对转矩的值更高。如果需要的发电机的速度增加,占空比较低值激发机相电流的较小的值,导致反向扭矩变小[27]。
对于不同的载荷和驱动器的工作范围。PWM占空比和的值由期望的(参考)速度确定。如果在一个窄的工作范围内(10%-20%的速度范围),那么和的差必须是百分之几的量级。另一方面,如果在一个更宽的操作范围内实现,高值和低值之间相差很多也是可以的。然而,它也可能会导致在BLDC驱动器更高的转矩脉动和更高的噪声[28]。
III.数字PWM控制器的稳定性和动力学
由于数字控制策略的性质,所使用的算法是变结构控制的一种形式。这种类型的控制是非线性的,根据系统的状态,这改变了系统的动态特性。因此,这种系统的稳定性分析可以通过一个候选Lyapunov函数进行研究。该功能体现本文中使用的数字控制的特点,由下式给出[29]
(1)
其中是一个称为参数“切换表面”,它可以用于数字控制的稳定性分析。因此,根据开关表面标志,数字控制器控制输入在较高和较低值之间选择。
根据Lyapunov稳定性理论,一个系统是稳定的,如果候选函数一次导数是负的,则如[30],[31]
(2)
根据(2),对于一个稳定系统,和其一次导数的始终应的符号相反。也就是说,在本质上,李雅普诺夫标准,其中所述数字控制系统应以符合。为了得到稳定的分析适当的系统方程,有必要产生一个框图,示于图2。基于速度误差和电流限制[如图2(a)和(b)所示],该算法选择了一个适当的占空比值,这在两个预定的占空比值(和)之间。
然而,目前的限制,由耐受性值Delta;omega;计算,示于图3。因此,如果速度误差太高,则限制为最大值,以实现机器良好运行。随着电机加快,误差减小且电流限制减小,从而保护系统过渡。因此,上升时间要尽可能小。
图2-电动模式数字控制逻辑
图3-数字控制下电流限制功能
图4-整个数字控制系统框图
数字控制的所提出的控制逻辑可以通过框图表示,如图所示4。如果速度误差大于零(gt;0),则更高的占空比被施加; 否则,选择较低的占空比。功能块Gomega;和Gi由图表示的函数来定义,分别示于图2(a)和6(b)。在程序框图上剩余的常量是BLDC电机的参数。
在稳定性分析中,直流母线电流限幅值被忽略,因为它不影响数字控制,其中,电流总是保持在限度内。基于这一假设,新变量u被引入作为系统的一个控制输入端
(3)
其中,是切换面
(4)
图5显示的状态平面通常用来描述一个动力系统的结构变化。X轴和y轴代表了系统的状态变量。因此,该系统的状态是通过在状态平面上的点表示,这可能只需要速度omega;(x轴的正的部分)的正值,而它的的值可以用正和负表示(加速/减速),如图5的y轴。
图5-数字控制下状态平面
图5的切换线()表示该结构的变化,即从低状态的切换到高状态,反之亦然。系统的初始点可以是在状态平面的任何地方。红线代表用于BLDC驱动器状态变量的轨迹的一个例子。可以观察到,如果在系统初始点是在平面上(A,B,C和D点任一处)的任何位置,该系统最终都会进入一个稳定点S。总之,本图形证明了数字控制使系统从初始点到其稳定点,使系统最终稳定。此外,它也表明,参考电压下的稳态误差小。
如前所述,如果(4)的和它的一次导数具有相反的符号,该系统是李雅普诺夫稳定。为了得到的一次导数,有必要导出独立于电流的状态方程,这会在之后的方程中体现。默认状态函数由下式给出
(5)
(6)
其中L是电机的相电感,是直流环节电压,K是反电动势常数,R是相电阻,J是机器的惯性,以及B是机器的摩擦。两个方程可以合并为一个表示数字控制无刷机的系统动力学二阶微分方程
(7)
以下常量可以简化上面的微分方程:
(8)
(9)
(10)
简化微分方程用来产生一个如下的状态矩阵
(11)
代表速度的变量x和它的一次导数构成了状态变量。它可用于其前面提到的Lyapunov稳定性的标准,其中,和其一次导数应当具有相反的符号。因此,开关表面函数的一次导数由下式给出
(12)
速度可以通过取积分衍生可以得到(7),
(13)
等式也可以呈现为
(14)
因此,如果开关表面的符号是负的,由李亚普诺夫标准,则(14)应该是正的,为了使系统稳定。所以有下面的公式:
(15)(15)两侧求导得到
(16)
另一方面,如果开关表面的符号是正,则(14)应得到负值
(17)
取导数得到
(18)
总之,如果它的预定义值和由(19)和(20)按李亚普诺夫标准求导出,那么这个数字控制BLDC系统稳定。
(19)
(20)
因此,存在最大值和最小值,系统是稳定的,这取决于应用。这些和定义数字控制BLDC驱动器
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146914],资料为PDF文档或Word文档,PDF文档可免费转换为Word



