简单的数字功率因数校正整流控制器外文翻译资料
2022-09-06 11:21:13

英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
简单的数字功率因数校正整流控制器
巴里A.马瑟,学生会员,IEEE和德拉甘Maksimovic,高级会员IEEE
摘要:本文介绍了一种单相数字功率因数校正(PFC)即不需要输入电压检测或具体的电流环路补偿,但能够在低谐波操作下通过普遍的输入电压范围和负载范围从连续传导的高功率运行模式下降到接近零的负载。所述控制器基于低分辨率A / D转换和数字脉冲宽度调制,无需微控制器或DSP的编程,并且是非常适合于简单的,低成本的集成电路的实现,或作为适于整合硬件描述语言核心与其他电源控制和电源管理功能。试验验证结果表示为一个300-W的升压PFC整流器。
关键词:数字化控制,低谐波整流,功率因数校正(PFC)整流器,前置调节器。
1.介绍
单相功率因数校正(PFC)升压整流器被广泛的应用,并且它的使用满足EN 61000-3-2标准所要求[1]。此外,还包括认证计划,如80 PLUS [2],指定新的最小功率因数在操作功率小于全额定功率。在低到中等功率水平,过渡模式控制(即临界导通模式,或在连续的边界动作导通模式(CCM)和不连续导通模式(DCM)),其提供了简单性和性能上的优势,并且被广泛使用,并支持一系列的商用低成本控制器[3],[4]。在较高的功率水平(以上几百瓦),CCM工作的首选往往是因为更低的传导损耗和电磁降低干扰(EMI)滤波的要求。目前的平均结合模式控制一个缓慢的电压控制环和乘法器,对于CCM PFC [5]而言这是一个公知的控制方法,需要一个相比于过渡模式控制更复杂的实现。
媲美简单过渡模式的动机或DCM工作,伴随低谐波,低传导损失,并且在CCM模式下的低EMI性能,非线性对于CCM升压转换器载体(NLC)控制技术在[6]中做了介绍了。在NLC的方法中,输入电压VG在PFC电流控制目表示输出电压Vo和开关的占空比D,从而,消除需要感测输入电压。此外,Maksimovic等。 [6]表明,重新控制目标可以通过使用相对简单的模拟电路来实现,其中通过得到的周期性载波波形的调制器,在控制目标,Ts是与T / TS替换d开关周期。其结果是,这种方法还消除了需要电流环补偿,并需要一精密模拟乘法器。在[6]中,非线性考虑的情况下载波波形被雇用,这就是为什么NLC长期被用来命名方法。这种方法的扩展和各种修改,包括基于实现线性载波波形[7] - [10],并与应用程序的其他转换器[8],[9],[11]已经报道了。此外,现在相关办法在商用PFC使用控制器[12] - [14]。
数字PFC控制器,提供完善的系统界面,电源管理功能,多模块的操作支持,和改进的电压环路动态响应,最近受到越来越多的关注。迄今报道的大多数数字PFC控制技术已经基于DSP或微控制器实现(见,例如,[15] - [23]),或都依赖开关周期。目的是提供高品质的电流整形和灵活的电压回路,在一个单一的控制器设计[26] - [30]也已呈现。
这样做的目的,提出的方法基于[6],本文主要是介绍数字PFC控制方法,称为数字NLC(DNLC)-PFC控制器,采用简单的电流控制法律,允许在CCM操作,感应输入电压。进一步的目标是展示如何在一个通用的输入电压范围进行低谐波操作和在大范围功率可以使用低分辨率A / D转换来实现,低分辨率数字脉宽调制器(EPWM)和最小的数字硬件。图1表示的框图是与DNLC-PFC拟议一个PFC升压整流控制器。
本文的结构安排如下。第二部分介绍了DNLC-PFC电流控制法。第三部分描述利用一个DNLC-PFC控制器时电压外部电压调节环路和地址建模,环路增益。第四节讨论了系统的实施和量化的问题。对于300-W升压实验结果DNLC-PFC控制整流器在第五章节提出,第六节结束。
图1. DNLC控制PFC升压整流
2.推导基本DNLC-PFC的控制律
如示于图1,在PFC整流器的电流控制目标可以写成,其中Vg为整流线电压,iL是低频(平均)成分电感电流,Re是仿真输出电阻,,其中P是PFC的运行功率整流器级[31,第661]。使用准静态近似,假设VG正在发生缓慢变化,开关周期Ts,对于CCM升压转换器,其中d是开关占空比,电流控制目标可以表示为 (1)
(2)
取功率控制信号的作用。在[6]中的步骤领先(1),随后进行了模拟调制器的实现的讨论旨在执行PFC电流控制目标被配制在Vo和d。在本文中,一种不同的方法,更适合于数字实现通过求解如下 (1)占空比命令直接作为当前样本iL[n]=lt;iLgt;,其中iL[n]表示的电感电流在中间样品理想地开关接通时间,或在开关关断时间,u是电源控制信号
(3)
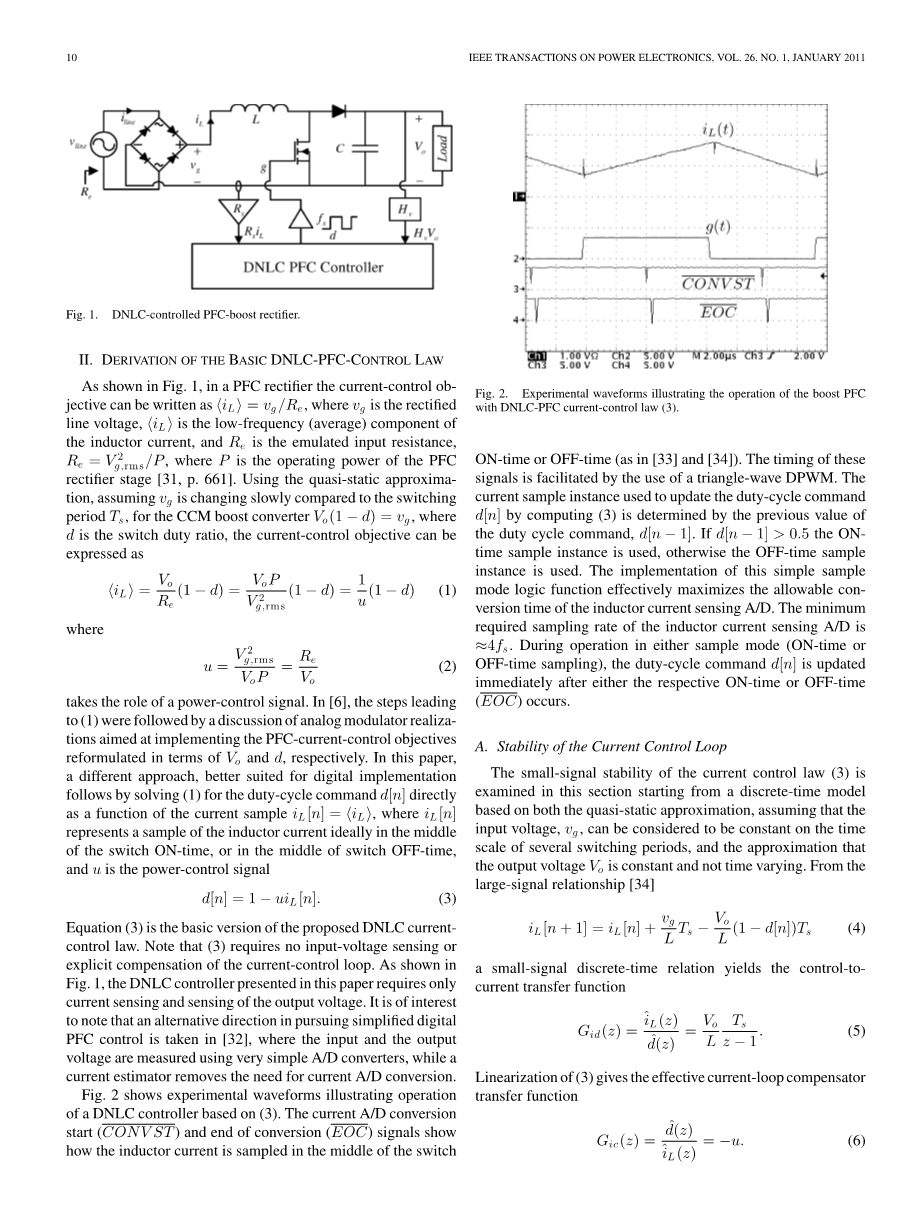
公式(3)所提出的DNLC电流控制的基本版本法。注意,(3)不需要输入电压感测或电流控制环路的明确的补偿。如图1,本文提出的DNLC控制器只需要电流感应和输出电压的感测。要注意,在可替换的方向简化数字PFC控制被取入[32],其中输入和输出电压使用非常简单的A/ D转换器测量,而电流估计消除了电流A / D变换的需要。图 2显示了实验波形操作说明一个DNLC基于(3)的控制器。当前的A / D转换启动(CONV ST)和转换结束(EOC)信号显示电感电流是如何在交换机的中间采样。
图2.实验波形显示了升压PFC的操作与DNLC-PFC电流控制法(3)
ON时间或关断时间(如在[33]和[34])。这些时机信号是通过使用三角波向下的促进。当前样本实例是用来更新占空比命令D [n]的,通过计算(3)由先前的值确定占空比命令,D [N - 1]。如果D [N - 1]gt;0.5准时样品实例是使用的,否则停止时间样本实例的使用。这个简单的实施模式的逻辑功能,有效使该容许转换电感电流检测A / D转换的时间。最低电感电流检测的A / D的所需采样速率是asymp;4fs。在任一采样模式(操作ON-时间或OFF时间采样),占空比指令D [n]被更新之后立即或者各个接通时间或断开时间(EOC)时发生。
A.电流控制环路的稳定性
本节中的起始检查从一个离散时间模型基于这两个准静态近似,假设输入电压VG,可以认为是对时间常数几个开关周期的尺度,以及近似了输出电压Vo是恒定的,不随时间变化的。 来自大信号关系[34]
(4)
小信号的离散时间方程产生控制到电流传递函数
- 线性化给出了有效电流环补偿器传递函数
图。3.闭环系统的极点的根轨迹图对两个实现的DNLC-PFC控制器。对于基本DNLC控制钛(z)的(一)根轨迹图在给定的法(3)。 (二)钛(Z)为DNLC控制法根轨迹图有两个采样电流滤波alpha;1=0.75分别,alpha;2= 0.25。
组合(2),(5),和(6),有效离散时间电流调节
获得环路增益
其中,Kcrit = RETS / 2L是决定操作的参数在PFC升压转换器的模式(CCM或DCM)整流器[31,第643]。根据(7),电流控制的稳定性循环可以用根轨迹与技术审查Kcrit作为增益参数,如图所示。图3(a)根轨迹表明,电流环是稳定的(即在内部具有极单位圆),只要Kcrit lt;1,这是在相同的条件特点的升压PFC整流在CCM工作在整个线周期[31页。 643]。总之,目前的根据环路(3)是在高功率水平的小信号稳定当转换器总是工作在CCM整个工作线周期。在降低功率水平,升压转换器工作在DCM围绕交流线路的过零点,而在CCM
围绕交流线路的峰值。电流环路的不稳定混合模式的一个CCM操作部(DCM中和CCM)线周期一般表现为本期增加一倍。这种类型的有界振动性导致增加线路电流总谐波(THD),。不过调查电流控制法的修改以实现稳定工作在轻载时,即,对于较大Kcrit值CCM,这可以容忍的。特别是,通过增加控制动态列入当前过滤器之前的计算。在这些情况下,iL[n]的(3)中被替换通过过滤的电流,IL[n]由计算
其中,alpha;1,alpha;2,。 。 。 ,alpha;K是实现滤波器系数。滤波器系数(alpha;S),提供最稳定的CCM Kcrit在对于给定的滤波器阶闭环于表Ⅰ中给出对于当前过滤器的系数仅包括两个或通过的目视检查中发现的三个电流样品闭环根轨迹图,生成数值,接着小的调整滤波器系数。对于高阶滤波器的进化算法[35]进行确定最佳滤波器系数。
表1
电流滤波系数延长Kcrit稳定性范围DNLC-PFC控制器的
如表一显示,所有滤波器系数之和为一个不改变电流检测直流增益。此外,所有系数具有较高的单调递减顺序。最大稳定Kcrit为当前的每一个加入顺序增加1过滤。根轨迹图与两个当前过滤器电流样本示于图。图3(b)。该图表明,电流环是稳定Kcrit lt;2。这有效地扩展CCM稳定运行从Kcrit范围lt;1至Kcrit lt;2相比,给出的基本DNLC-PFC控制律(3)中。两个采样电流滤波的滤波器系数也很容易在数字系统中实现,而不需要额外的硬件乘法器的滤波器系数可以通过简单的移位和加法来实现。因为易于实现的和增加的CCM-稳定性范围,则与实施两个采样电流DNLC-PFC控制律被选定的过滤器执行实验原型。
B.运行稳定轻载时
在轻负荷运行时,转换器在工作期间的某一部分或全部的输入电压线周期的DCM和功率命令信号u将是有限的,它的最大稳定极限UMAX,如
其中,在信用的基础上确定讨论的稳定性判据第II-A。为了保持光电压调节,当传统的功率命令信号具有负载条件达到稳定边界U = UMAX,进一步修改,基本DNLC电流控制可以作出(3)
其中,DMAX是表示一个次级功率指令信号过程中的任何给定的最大可允许的占空比半年线周期。此修改有效地实现了(3),其占空比与给定的基本DNLC电流控制法命令偏移等于(1 - DMAX),被调节到维持输出电压调节。在高功率运行时,当ult;UMAX,Dmax等于1,从而减小了在(10)给定的控制法回至(3)。这一修改使电压调节可能下降,甚至高输入电压电平基本上为零负荷,有一定程度的费用增长,在轻负载时的输入电流失真。
图4.完成DLC-PFC控制器
3.电压调节和电源控制
升压整流ABLOCK图的完整DNLCPFC控制器基于所采样的输出被示于图4.电压误差,电压环路补偿GCV(z)的计算电源控制信号y [k]的。在高功率运行水平,降低线电压,U [N] = Y [K]。然而,由于操作功率电平被降低,U [n]被限于UMAX的值如前一节中所描述。电源指令信号,Y [k]的,则继续增加发起减少DMAX [k]的的通过Dmax控制回路。离散时间采样实例在电压回路所使用的字母k表示为相对于字母N表示在采样频率的差异。由于外电压环路带宽必须是低的,至少在稳态操作时,有利的是进行采样的输出的速度同步电压。采样这个速率包括一个事实,即输入电流的谐波失真是由输出电压纹波和电压循环引起的,不受影响可以在[36]中描述避免极限环。此外,一个满意的电压外环PI补偿器相比类似性能的PI补偿器设计可实现使用更少的硬件,由于缩短fs的采样率落实补偿所需的长度。提供了一种用于同步到交流线路的要求通过产生从一个数字比较得到的时钟或检测到的电感电流或占空比命令不变。电压环路时钟VCLK的产生示于图4作为“行同步”块。线同步可能也可以通过输出电压循环本身通过提供使用单比较A / D的方法[37]。
- 通过的功率控制
得到的PFC输出级的模型线周期[31页。 669]为DNLC-PFC电流控制法在第二部分中描述当升压型PFC工作在整个线周期CCM。小信号扰动所述功率命令信号,PFC输出端口电流,和整流器的输出电压是由U,I2,和v分别表示。这种模式适用于以下的频率和2fline假定恒定的工作点。在CCM始终运行U [N]=Y [K](如u[N]lt;UMAX)和u[n]和模拟的输入电阻(重)由(2)有关。在这些操作条件下,小信号模型参数
(11)
(12)
其中P是PFC整流器的平均操作功率阶段。输入电压增益G2从计算中省略因为计算小信号控制时,输出增益于u到v。假设值,解决在控制输出传输模型结果功能为DNLC PFC控制的升压整流
这种单极传递函数容易补偿,用线性PI补偿器,GCV(z)的图 4,为了达到标准的缓慢电压回路控制带宽asymp;10Hz和最高预期asymp;70◦的相位裕度直流环路增益的条件。负载瞬态响应的控制的DNLCPFC整流类似的功率级参数在表II和几乎相同的数字电压环路给定的实施这里描述的示于[37]。
图6.在DCM实验和模拟电感电流波形总是操作的比较,P =30W,Vg的,均方根=120伏,60赫兹。 (a)电感器使用DNLC-PFC控制器收集电流波形。 (b)电感电流波形使用DNLC-PFC模拟器和恒占空比计算控制器模拟器。
B.通过的功率控制
在较低的功率水平和/或更高的整流操作输入电压,在DCM中的一些或全部操作输入电压线周期。在这种类型的操作的U [n]在UMAX
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146917],资料为PDF文档或Word文档,PDF文档可免费转换为Word



