一个基于微机机群的实时模拟全电力船舶综合电力系统分析和优化外文翻译资料
2022-09-05 16:50:58
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
一个基于微机机群的实时模拟全电力船舶综合电力系统分析和优化
文摘——一个基于微机机群的实时模拟器的开发全电力船(AES)综合电力系统(IPS)分析和优化。系统由密歇根大学确立,得到了美国海军研究办公室(ONR)的财政支持。这个系统旨在解决涉及多学科的全电力船问题,如优化电源管理和动态系统的重新配置。在硬件建设的同时,模块化的IPS模式包括发电模块、可重组区域电能分布系统模块,船舶推进模块和船舶动态模块也在开发和整合中。模拟图形用户界面也被开发出来用于提供一个用户友好的工程环境,使得数据采集和参数优化可以有效地执行。对不同船支的操作情况进行了系统开发和初步仿真。
索引词——全电力船,综合电力系统,区域电气配电系统,实时仿真、半实物。
一 引言
下一代战舰将会载有综合电力系统(IPS),包含一组主要和辅助电源用于提供预演的力量,另外还有船用电动加载。再加上发电的集成体系,引入先进的电力电子系统新技术,例如:智能控制系统和先进的储能技术用于实时电源管理和电力系统重组,特别是在设备故障和战损时。电源管理的主要目标是确保电力负荷的持续供电,从而增加船舶电力系统(SPS)的可靠性和生存能力,从而提高舰艇任务的有效性。
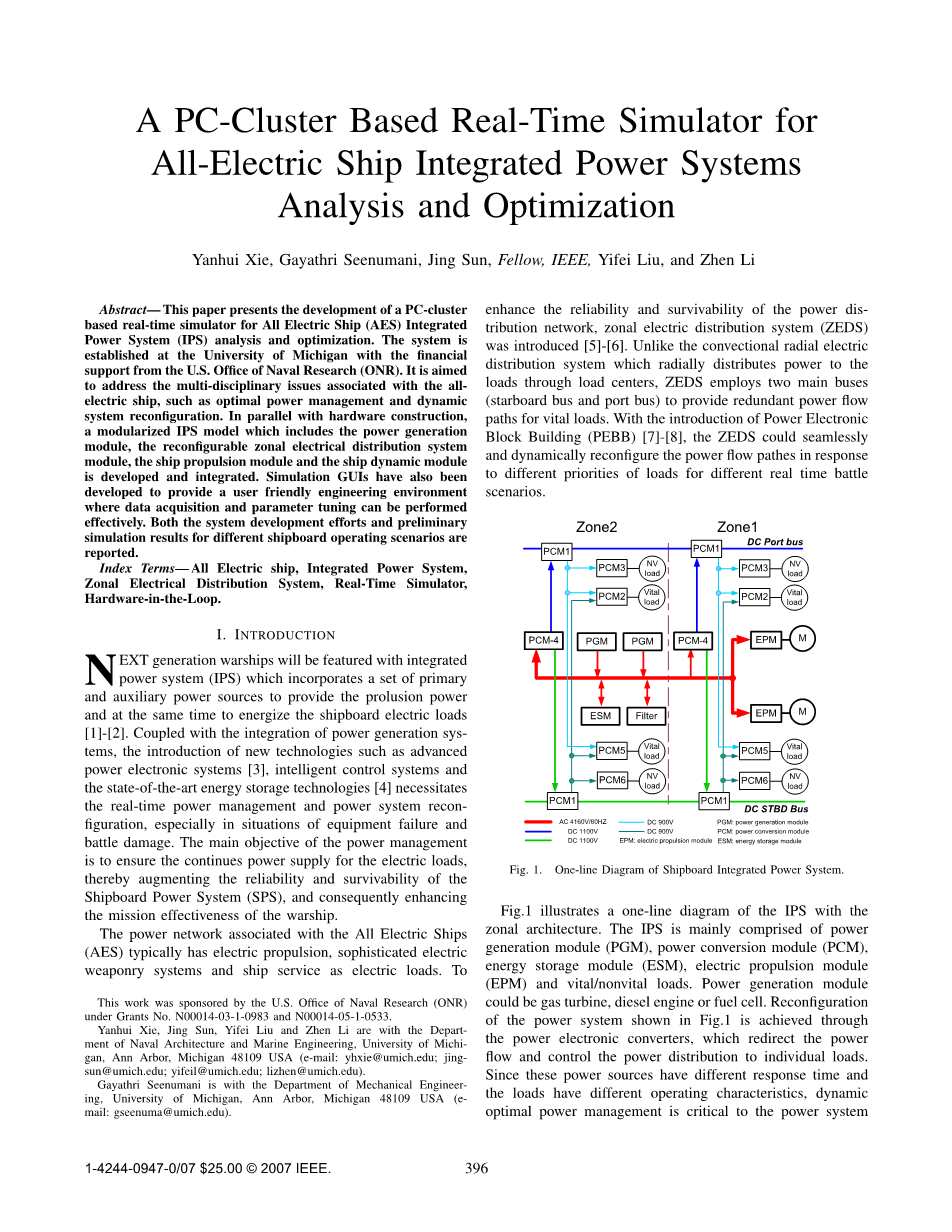
全电力船的动力网络一般带有电力推动系统,复杂的电力武器系统和船舶服务电动负载。为了提高可靠性和电源分配网络的生存能力,系统使用了区域电力分配系统(ZEDS)。不同于对流径向电力分布系统通过负荷中心发散性地向负载分配电能,ZEDS使用两根主要总线(右舷总线和端口总线)为重要负荷提供冗余的电能通路。随着电力电子模块建立(PEBB)的引入,在不同的战斗情景下,ZEDS可以无缝地和动态地为不同优先级的负载重新配置电能流道。
图1 船舶综合电力系统的单线图
图1展示了分块结构的IPS单线图。IPS主要是由发电模块(PGM),电源转换模块(PCM),储能模块(ESM),电力推进模块(EPM)和重要/非重要负载。发电模块可能是燃气轮机、柴油机或燃料电池。图1所示的电力系统重新配置是通过电力电子转换器,将电能重定向,然后配电给个别负载。因为这些能源有不同的响应时间,负荷有不同的操作特征,动态优化电能管理系统对于电力系统的稳定、效率和性能是至关重要的。IPS的电能管理系统面临了几个挑战,包括:(1)如何协调电源与电源转换器,确保重要负荷的不间断电能供应?(2)如何重新配置的系统使其达到最佳的效率和最大的可靠性?(3)如何实现在重新配置的同时确保电能质量和系统在瞬时操作的完整性?
为了解决与AES相关的涉及多学科的问题,先进的分析和数值工具对于完善模型的调查和系统优化是十分必要的。在ONR的支持下,一个船用电力系统实时仿真平台在密歇根大学建立用于进行AES相关研究和教育活动计划。在下面几节中,我们将讨论平台建设、IPS建模和集成以及GUI开发。
二 模拟器硬件配置
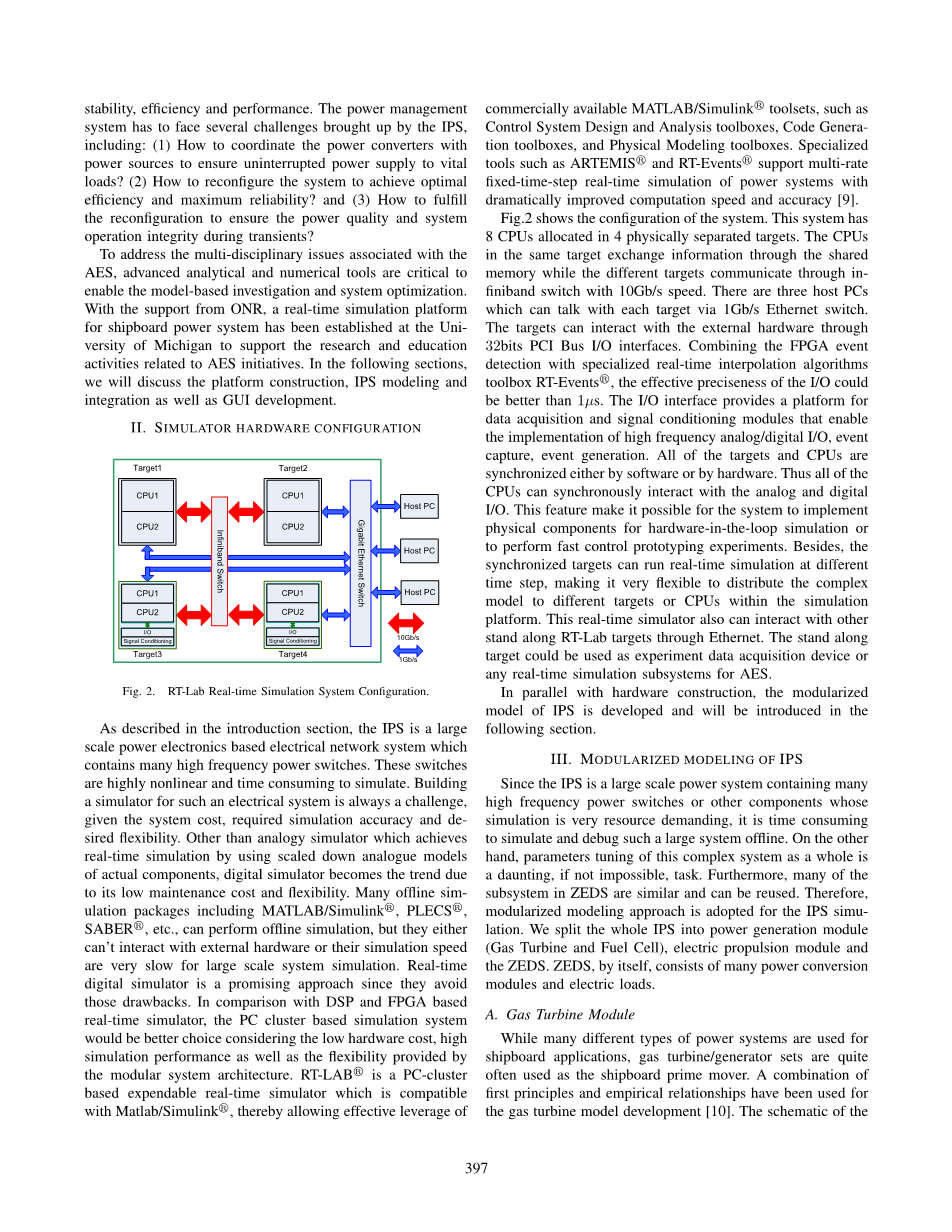
图2 RT-Lab实时仿真系统配置
如引言部分所述,IPS是一个基于包含许多高频电源开关的大规模电力网络系统,这些开关模拟具有高度非线性,而且需要大量时间模拟。为电力系统构建一个这样的模拟器始终是一个挑战,涉及模拟器的成本,准确性和灵活性。相比于其他的模拟器,通过按比例缩小模拟实际组件模型来实现了实时仿真,数字模拟器由于其维护成本低和灵活性强越来越受到大家的欢迎。许多离线模拟程序包括MATLAB/Simulink,PLECS,SABER等等,可以进行离线模拟,但是对于大型系统仿真,他们要不不能与外部硬件相连,要不仿真的速度非常慢。实时数字仿真器是一种很有前途的设计,因为他们避免这些缺点。相比于基于DSP与FPGA的实时模拟,基于PC集群的仿真系统将是更好的选择,因为其模块化的系统架构使得系统的硬件成本低,仿真性能高以及灵活性强。RT-LAB是一个基于消耗型实时模拟器的微机机群与Matlab/Simulink兼容,从而能够有效地利用MATLAB/Simulink工具集,如控制系统设计和分析工具箱,代码工具箱和物理建模工具箱。专门的工具如ARTEMIS和RT-Events能够支持多速率定时间步长电力系统实时仿真,而且能显著提高计算速度和准确度。
图2所示的是配置系统。这个系统有8个CPU分配在4个分离的物理目标上。CPU在同一目标中通过共享内存来交换信息,而在不同的目标中以10 Gb/s的速度通过网络交换机进行交流。三个主机电脑可以以1Gb/s的速度通过以太网交换机与每个目标进行交流。目标还可以通过32位PCI总线I/O接口与外部硬件进行交互。结合 FPGA检测与专业的实时插补算法工具箱RT-Events,I/O接口的有效交互速度可以比1micro;s还快。I/O接口为数据采集和信号调节模块提供了一个平台,使其实现高频的模拟/数字交互,事件捕获,事件产生。所有的目标和CPU通过软件或硬件进行同步。因此所有的CPU可以与模拟和数字I/O接口同步 .这个特性为系统实现半实物仿真的物理组件和快速控制原型试验提供了可能。此外,同步的目标可以实时仿真运行在不同的时间步长,使它非常灵活的分配复杂模型给不同目标或CPU在实时仿真平台中。该模拟器还可以通过以太网与其他RT-Lab目标的站点相连。对于AES,目标上的站点可以作为实验数据采集设备或任何实时仿真子系统。
在硬件建设的同时,IPS的模块化模型也进行了开发,将在下一节中进行介绍。
三 IPS的模块化建模
由于IPS是大规模电力系统包含了许多高频电源开关或其他组件需要很高的资源配置,这需要大量的时间进行模拟和离线调试这样的大型系统。另一方面,对这样的大型复杂系统的进行整体的参数整定是很难完成的任务。而且在ZEDS中很多子系统是相似的可以重复利用的。因此在IPS模拟中模块化建模的方法是适用的。我们将整个IPS分割成发电模块(燃气轮机和燃料电池),电力推进模块和ZEDS,ZEDS本身包含许多电力转换模块和电气负载。
A燃气轮机模块
虽然有许多不同类型的电力系统用于舰载应用,但燃气轮机/发电机组是最常用作舰载原动力。第一原理和经验关系的结合已被用于燃气轮机模型开发。船用燃气轮机模型的电力系统的原理图如图3所示。
图3 燃料电池系统的示意图
燃气轮机的模型包括压气机、涡轮、燃烧室模型,动态捕捉旋转涡轮和压缩机之间的耦合。压缩机和涡轮的建模,是通过回归相应的性能图的经验关系来建立的。重要的动力学模型是在燃烧室中燃烧的燃料的温度和质量与涡轮增压器的转速的关系模型。燃气轮机驱动发电装置,将机械能转换为电能并生成三相交流电源电压4160V L-L和60赫兹的频率。对于在这个平台上的特殊系统的建模,总输出功率是255千瓦至1.4兆瓦。功率需求步进变化的开环仿真如图4所示,燃气轮机具有快速二阶响应。
图4燃气轮机的开环仿真:需求的功率和产生的功率
B燃料电池模块
清洁高效的燃料电池(FC)被认为是IPS的一个辅助电源。舰载应用程序使用燃料处理系统(FPS)从天然气中得到纯氢。其他模型代表不同的燃料重整技术,如汽车热改革(ATR)柴油也可以进行合并。燃料处理相对于燃料电池反应慢的多。FC-FPS模型由J.Pukrushpan等建立,示意图如图5所示。
图5 燃料处理系统示意图
典型的FC-FPS模型包括水脱硫剂(HDS)、部分催化氧化剂(CPOX),水煤气转移(WGS)和优先氧化剂(PROX),阳极电压和堆栈子模型,HDS WROX(WGS PROX)被建成一阶滞后模型。重要的动力学模型是以CPOX温度、阳极压力和氢分压阳极为核心建立的。计算机中的堆栈电压的模型是堆栈电压和输出负载电流,阳极和阴极压力和膜水化的函数关系。FC系统的输出是通过直流/直流转换器连接在 PCM4上的直流环节。对于特定系统的建模,FC-FPS的总输出功率是80千瓦到330千瓦。燃料电池负载功率步进变化的开环仿真如图6所示。
图6 燃料电池的开环仿真:当前需求的功率和生成的功率
可以看出,燃料电池是一个比燃气轮机/发电机组要慢的发电系统。由于缓慢的动力器件改革燃料电池的氢缺失体现在输出功率下降后氢使用量的瞬时增加。
C ZEDS单元
图1显示的是带有PGM,EPM,ESM和ZEDS的双区域IPS。因为相比于交流区域结构,直流区域结构有许多优点在舰载应用程序架构中,所以在我们的模型中采用直流ZEDS。直流ZEDS的关键组件是重要/非重要负载和电源转换模块如图7和图8所示。单个模块的组成在下面进行简要的说明。
图7 ZEDS中PCM1的SimPowerSystems/ARTEMIS模式
- PCM1:图7显示了PCM1模型。PCM1是一个直流/直流转换器配有重组配电盘。DC/DC变换器以用ARTEMIS工具箱建立的1-leg的时间标记桥和用SimPow-erSystems工具箱建立其他组件为基础进行建模。操纵三个配电盘可以重组每个区域的电能路径。直流总线故障和恢复模拟也可以通过操纵配电盘来实现。PCM1的输出电压是900V比主总线少200V。在正常情况下,PCM1的负载是一个重要负载和一个非重要负载。一个重要负载会加入,当由设备故障或战斗伤害引起的总线反向或PCM4/PCM1的电压下降的情况出现时。
图8 ZEDS中PID的原理图
2)PCM2/5:图8a显示了PCM2/5的原理图。PCM2/5是DC/AC逆变器是用与 SimPowerSystems兼容的ARTEMIS工具箱建立的3-leg 的时间标记桥为基础来建模的。因为他们激励的重要负荷不应该因为任何变化而失去电源,所以有一个自动总线转换(ABT)电路可以自动选择电源输入端口在高输入和低输入之间。通常高输入的优先级高于低输入,只有当电压下降到低于低输入100V时,高输入才被替换。然而,为了平衡两个直流总线的负载,高输入将再被使用当电压恢复到高于低输入50V时。
3)PCM3/6:图8b显示了PCM3/6的原理图。PCM3/6是直流/直流变换器以A-RTEMIS工具箱建立的1-leg时间标记桥为基础进行建模。PCM3/6没有ABT用于非重要性质的负载的连接。非重要负载会直接失去电源如果主总线或副总线在这方面的输出降低。
4)PCM4:图8c是PCM4的原理图,PCM4是交流/直流整流器,通过控制整流器的发射角将三相交流电源转换成直流电源。在我们的模型方面,PCM4有混合动力电源:交流电主总线和燃料电池。交流/直流的整流器输出通过直流环节与燃料电池模型的直流/直流变换器的输出相连。来自总线和燃料电池的电能比例可以动态地管理通过分离两个输入转换器所需的电流。得到良好规范端口总线和右舷总线上的直流电压,有右舷和左舷输出直流/直流转换器从直流环节牵引电流和调节两个直流总线的电压到1100V。两个输出直流/直流变换器的建模与PCM1直流/直流转换器相似,采用buck变换器拓扑建模,用与SimPowerSystems兼容的ARTEMIS工具箱建立1-leg时间标记桥。转换器的输出都是由PI控制器。
5)负载:重要/非重要负载被建立为恒功率负载。所有的负载可以根据能源管理模块的命令从直流总线牵引一定的电能。更复杂的负载像直流电机和交流电机在未来也可能被建模和集成。
D推进装置模块
1)电力推进模型:电力推进模型是一个低速三相交流/直流/交流变速传动系统与大扭矩由永磁同步电动机驱动的螺旋桨。交流/直流整流器是以SimPowerS-ystems工具箱建立的整合桥为基础建立模型。还有一个制动斩波器的直流环节用于吸收汽车在紧急停车情况排放的再生能源。作为永磁同步电动机的驱动和起变频器作用的直流/交流逆变器,以ARTEMIS工具箱建立的时间标志桥为基础建立模型和采用闭环速度控制的控制器。除了三相交流/直流/交流推进系统,在将来其他交流推进技术如周波变流器,矩阵变换器和高温超导体(高温超导)马达也可以用来建模和集成。
2)船舶动态模型:推进电动机的负载转矩是由船动态模拟的,是根据流体动力学来计算船的速度和螺旋桨速度。[17]中给出的船模是改造后的。它包括附加质量和水动力和作用在船上的时刻。鉴于所需的船速,在模型中计算所需的电动机转速和转矩和推进电动机控制单元。
四 模型集成、分布和初步的模拟
A模型集成和分布
IPS模型集成有两个阶段。首先,ZEDS模块和推进模块分别集成和测试。正如我们在前面的章节中讨论的ZEDS,负载和PCM是关键的组成部分,要分别进行开发和测试。在此之后,所有的PCM和负载之间相互关联,形成了两个区域ZEDS。船舶动态模型的集成和推进螺旋桨模型非常简单。所需的扭矩和速度信号由船舶动态模型计算被发送到发动机推进模型。然后ZEDS和推进模块与发电模块相连接。
IPS是一个大型系统,有许多具有不同特点的子系统。例如,G/T和FC的运作是相对缓慢的,但每毫秒时间一步是充分的。另一方面,PCM有高频功率开关、子系统时间步是50micro;s比PGM的更短。为了更好的模拟性能所有CPU相对平衡的分配计算任务,每个任务都要正确地分配到8-CPU模拟器。在分配资源方面有几个注意事项需要考虑:(1)子系统分配CPU的任务不应太复杂,否则超支运行将导致差的模拟性能;(2)由于目标之间的实时通信是一个资源要求的过程,它是有利于模块化的子系统作为一个实体分配给一个CPU,而不是将子系统划分为几个部分来减少目标之间的信号交换;(3)在单个采样时间中每个CPU可以实现模拟,子系统与子系统采样速度慢,可以将子系统分组来加快采样速度。考虑到这些限制,我们为子系
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147222],资料为PDF文档或Word文档,PDF文档可免费转换为Word



