无刷直流电机驱动电动汽车再生制动系统外文翻译资料
2022-09-04 19:58:54
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
无刷直流电机驱动电动汽车再生制动系统
摘要:再生制动能提高能源使用效率延长电动汽车的行驶距离(EVs)。在本文中,一个富有创造性的再生制动系统(RBS)被提出。RBS适用于无刷直流电机(BLDC),它强调制动力的分布,以及无刷直流电机的控制。在本文中,BLDC电机控制采用传统的比例 - 积分 - 微分(PID)控制以及制动力的分配,采用模糊逻辑控制。因为模糊推理比PID控制慢,制动转矩可以实时通过PID控制来控制。相较于其他的解决方案中,新的解决方案在可行性,鲁棒性和效率 方面具有更好的表现。然后,本文介绍了仿真结果通过分析MATLAB和Simulink环境下的电池充电状态,制动力和直流母线电流。仿真结果表明,模糊逻辑和控制可以实现再生制动,并能在保证制动性能的条件下延长行驶距离。最后,验证了所提出的方法是具有可行性的。
关键词:无刷直流(BLDC)马达,比例 - 积分 - 微分(PID)控制,再生制动系统(RBS),模糊控制。
一.引言
近年来,电动汽车(EV)已经收到多的关注,以替代传统的内燃发动机(ICE)的车辆。前所未有的焦点主要是环境和经济问题与作为内燃机动力汽车燃料化石为基础的石油消耗。随着电池和马达技术的进步,电动汽车成为最有希望的替代到内燃机的车辆。插电式电动车使用一种可以从标准电源插座充电的电池系统。由于电动汽车的性能已成为媲美,如果没有更好的比那些传统的内燃机汽车,电动汽车
是现实的选择。再生制动可以在电动汽车被用作用于回收制动能量,这在常规内燃车辆是不可能处理的。当车辆的惯性力将电动机转化为发电机模式时,再生制动是在制动过程把驱动马达中的能量回馈电池的过程。
在这种模式下,电池被认为是一种负载,从而向电动汽车提供一个制动力。它表明,使用电动汽车再生制动相对于没有再生制动系统(RBS)可以提高驱动高达15%。然而,再生制动不能工作在所有时间。例如,当电池被完全充电,制动要受到通过在一个电阻负载耗散的能量的影响。因此,在电动汽车中机械制动器仍然需要。机械制动系统对于电动汽车的安全和其他操作也很重要。电动汽车机械制动和再生制动的协调是由一个单一的脚踏板来实现的:脚踏板的第一部分控制再生制动,第二部分控制机械制动。这是从再生制动到机械制动的无缝过渡。它不能被简单地被传统内燃机汽车实现。
- 电机与控制
- 无刷直流电机
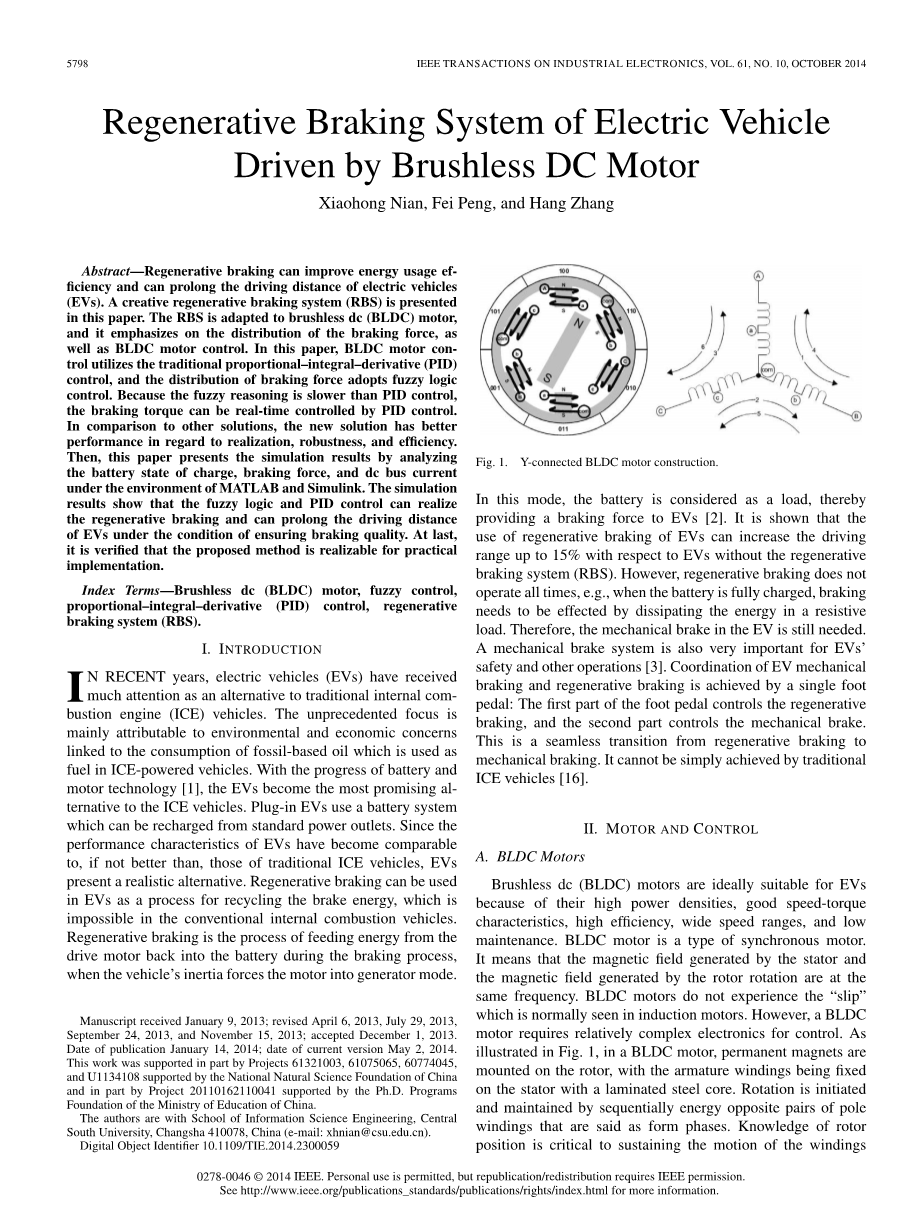
无刷直流(BLDC)电机是非常适合电动汽车因为它们的高功率密度,良好的转速转矩特性, 高效率,宽转速范围,以及低维护。无刷直流电动机是一种同步电动机。这意味着,由定子产生的磁场和由转子旋转而产生的磁场是在相同的频率。无刷直流电机不会经历在感应电机中通常看到的“滑”。然而,无刷直流电机电机需要相对复杂的电子控制。如该图1所示,在直流无刷电机,永磁体安装在转子上,电枢绕组固定在带叠层钢芯的定子上。旋转是发起和维护的顺序相反的对极绕组,称为形式相。转子位置的知识是维持正确的运动的关键。
转子运动的信息通过从霍尔效应传感器或线圈电动势测量得到。
- 无刷直流电机的控制
无刷直流电机控制是电子换向器(逆变器)的主控制,以及换向是通过控制逆变器桥臂的导通顺序实现。一个典型的H桥电路如图2所示。无刷直流电机采用直流电源提供能量。
如果我们想控制无刷直流电机,我们必须知道换向的转子位置。霍尔效应传感器是最常用的用于预测转子位置的传感器。无刷直流电电压矢量分为六个扇区,与霍尔信号六态一一对应,如图3所示。
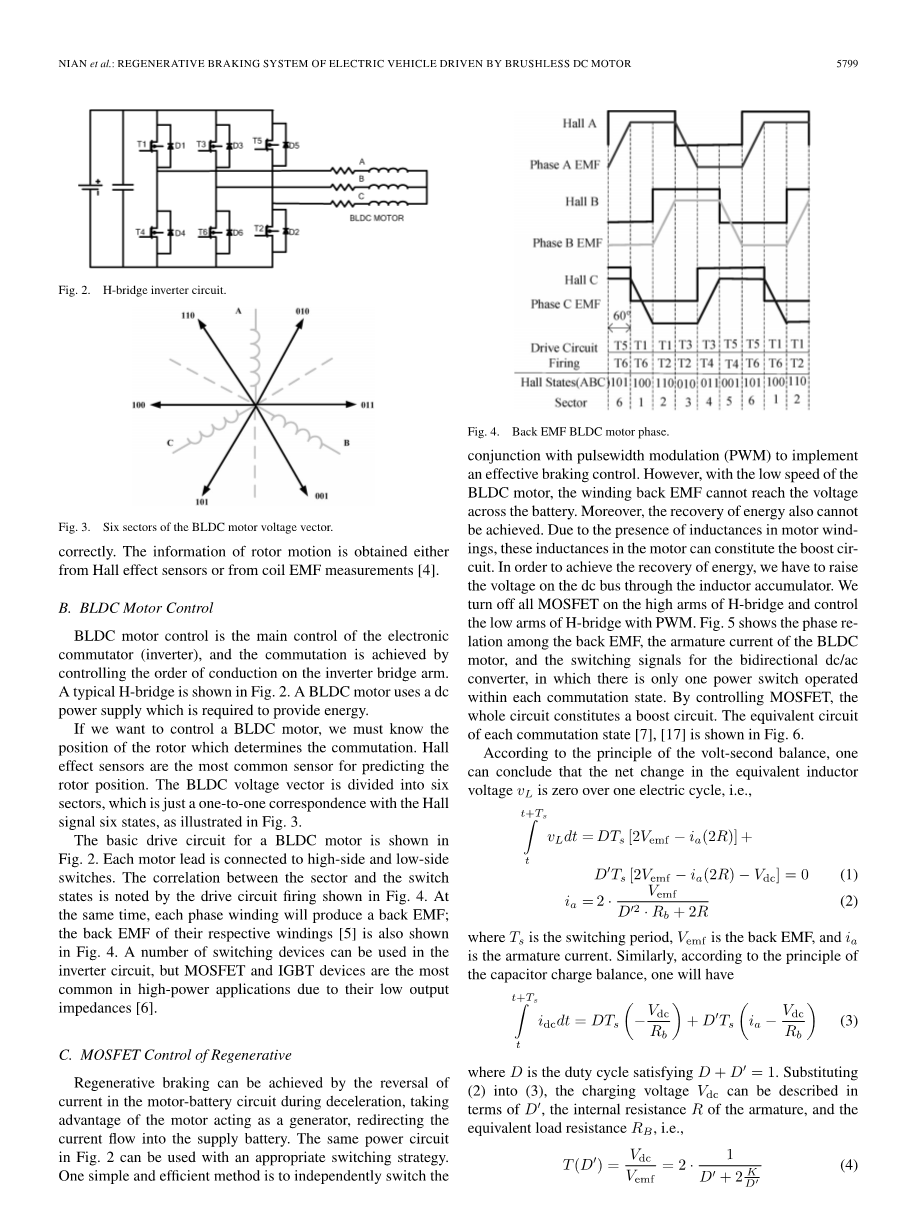
一个无刷直流电机的基本驱动电路如图2所示。每个电动机引线被连接到高侧和低侧开关。扇区和开关状态之间的相关性由图4所示的驱动电路发出。同时,每相绕组中会产生反电动势;各自绕组的反电动势也如图4所示.许多开关装置可以用于逆变电路,但MOSFET和IGBT器件由于它们的低输出阻抗是大功率应用中最常用的。
3. 再生的MOSFET控制
再生制动可以通过在减速过程中的电机电池电路中的电流逆转来实现,利用电动机作为发电机的优点,将电流流入供应电池。相同功率电路如图2可以使用一个适当的开关策略。一个简单而有效的方法是独立开关结合脉宽调制(PWM)来实现一种有效的制动控制。然而,由于直流无刷电机的转速低,绕组反电动势不能达到电池两端的电压。而且,回收的能量也不能实现。由于在电机绕组电感的存在,
这些电感在电机可构成升压电路。为了实现能量回收,我们必须提高
通过电感蓄能器对直流母线的电压。我们关掉所有H桥上高臂MOSFET 和H桥低臂PWM控制。图5显示了反电势之间的相位关系,无刷直流电机的电枢电流,双向直流/交流转换器的开关信号,其中只有一个电源开关操作在每一个换相状态。通过控制MOSFET,整个电路构成升压电路。每个换向状态的等效电路如图 6所示。
根据伏秒平衡的原理可以得出这样的结论:在一个电周期,等效电感电压VL的净变化为零,即
(1)
(2)
其中TS是开关周期,VEMF为反电动势,和IA是电枢电流。同样,按照原则电容充电平衡,将有:
其中D是占空比满足,代入(2)到(3),充电电压VDC可以从D描述,电枢的内电阻R,和等效负载电阻,即:
其中K为R/Rb。
评价开关的最大转化率策略,我们区分(4)相对于至得到
通过使(5)等于0时,可以得到值。使(4)最大化如下:
当K从0提高到1。应当指出的是,最大转换比小于1的情况下,其中Kgt;0.5。 换句话说,交流发电机整流的输出电压将小于反面电动势,即电动汽车的动态能量将被转移到制动扭矩和热,而不是被回收到电池。图7示出的关系:
- 电动汽车建模
电动汽车的建模在Matlab / Simulink已经完成。驱动程序块通过各种动力总成系统组件传递的转矩请求,实现车辆运动。系统级仿真器已经通过使用基于由组件制造商从文献来源获得的测量结果提供或扩展测量的经验数据建模。这些在Simulink模型作为查找表。其他组件模型是物理或分析的性质和数学方程。
电动汽车模型包括电池重量约为1325公斤。车辆具有2.57平方米正面面积,具有阻力系数0.3和滚动的0.00268Omega;电阻。分配的值是基于一个中等大小的汽车的粗略估计。选择的电机是一个40千瓦的峰值功率的无刷直流电动机。电池包是锂离子电池。它具有额定电压72伏,1.2千瓦时能量,重量约20公斤。
- 驱动子系统
驱动程序块提供所需的驱动转矩和通过激活的加速器所需的制动力矩和制动踏板。如果司机希望加速车辆,他踩下油门。根据加速器踏板的下压量,一个相应的驱动转矩请求通过各种动力系统,如电池和电机型号发送到车辆。只有当制动踏板被压时,才开始再生。一旦制动踏板被压下,根据制动踏板的位置,相应比例的制动转矩被应用。然后,将制动力矩根据再生制动控制策略分为再生制动和摩擦
制动。机械能在车辆按照预先设定的驾驶模式行驶时的消耗量主要取决于三个因素:气动摩擦损失,滚动摩擦损失,制动能量消耗。描述道路车辆纵向动力学的基本方程有以下形式:
其中,Mv为车辆质量(千克),v是在车辆速度(米每秒),Fa是气动摩擦(牛顿),Fr是滚动摩擦(牛顿),Fg为在非水平道路上行驶时由重力引起的力。
牵引力是由原动机所产生的力减去所使用的力,以加速车辆内部的旋转部件,然后减去所有的摩擦损失在动力总成。
- 气动摩擦损失:通常,气动阻力Fa是通过简化车辆为棱柱体的正面面积Af近似。由一个气动阻力系数,以模拟实际流动条件下的阻力所造成的停滞压力:
这里,v是车辆速度(米每秒),和rho;a是环境空气的密度(以每立方米千克)。参数值Cd是使用风洞中计算流体力学程序或实验的系数。为了估计机械能,它需要驱动一个典型的测试循环,而这种参数可假定是恒定的。
- 滚动摩擦损失:滚动摩擦仿照
其中,Mv为车辆质量(千克),g是重力加速度(每平方秒米),Cr是滚动摩擦系数,以及alpha;是倾斜角(度)。滚动摩擦系数Cr取决于许多变量。最重要的影响量是车速v,轮胎压力p,与路面的条件。 对于许多应用中,特别是当车辆速度保持适中,滚动摩擦系数的Cr可以假定是恒定的。
- 上坡驱动力:在非水平路面行驶时,通过重力的感应力是保守,相当影响车辆行为。在本文中,这股力量将由被建模
- 电动汽车
电池电源驱动电动汽机(EM)。在电机作为一个马达来推进车辆时供给正功率和作为发电机被供给负功率。EM建模为无刷直流电机从顾8千瓦的MC_PM8的电动机 - 发电机特性的查找表。该电动机的尺寸减小到8千瓦,以满足规定的规格。小型化是通过减少与由缺省功率(8千瓦)和所需的功率(7千瓦)的比率来确定的比例因子的转矩进行。
- 制动策略子系统
控制策略系统的结构如图8所示。通过踏板传感器,我们可以得到司机的所需制动力。根据前、后车轮的制动力分布规律,分别计算出前后轮的制动力。根据模糊逻辑控制器,我们可以得到的再生制动力的值。然后,前机械制动力,再生制动力和后制动力可以得到最后,将再生制动力转化为制动电流通过:
制动电流Icom正比于再生制动力Freg,并且k1为比例因子。
- 制动力分配:在RBS电动汽车中,制动力主要是车轮的制动力,后轮制动力Frear。对于前轮驱动的电动汽车,前轮制动力是由两部分组成:前轮摩擦制动力和再生制动力。因此,制动力分配是指总的制动力Sigma;F在前轮和后轮,后轮摩擦,和再生制动力分配和协调的问题。在理想情况下,电动汽车的前轮和后轮的制动力分配由下式给出:
在(12)中,m是在电动汽车的质量,b为电动汽车质心到后轴中心线的距离(米),hg是电动汽车质心高度,并且L是前后中轴线的距离(米)。在图9中,Z是制动力,它被定义为Z =dv / dt/g,其V是电动汽车的速度,g为重力加速度。电动汽车前后轮的制动力分配策略如下:当Z<0.1,总制动力Sigma;F全部由驱动轮承担,前轮不参与的
车辆的制动。当0.1lt;Zlt;0.7,制动力是由机电式复合制动分配。根据(12),可以得知,当在电动汽车前后轮被锁定时,理想的制动力分配曲线(I曲线)如图 9所示。鉴于在任何附着系数的道路上,前面和后轮同时锁定的条件是:前轮和后轮的制动力都等于附着力phi;,并保持:
在(13)中,phi;是道路和车轮的附着系数。距离(米)从质心到前轴
中心线。通过踏板传感器,我们可以得到驱动所需制动力。
- 模糊控制:电动汽车再生制动力分配受多种因素的影响,许多参数都在不断变化,所以回收策略是很难表达的。电动汽车制动力分配的模糊逻辑控制策略,可以通过不同的因素的影响很容易地证明。因此,模糊控制理论应用于电动汽车的制动力分配。在电动汽车制动力分配结构的模糊控制策略示于图8。三个输入是电动汽车前轮制动力,速度,和电池充电状态[SOC] 。
在模糊控制系统中,输入变量包括前制动力,电池充电状态,电动汽车速度。输出变量是正比于前制动力的再生制动力的比率。前制动力:驾驶员制动要求与行车安全有关。制动力值代表的是司机需要的制动距离和制动时间。我们更喜欢速度的汇合是低,中,高。通常论域是[ 0,2000 ]。隶属函数如图10(a)所示。充电状态:当电池的充电状态少于10%,电池的内部电阻高,不适合在这种情况下充电;再生制动力应该是一个较小的比例。当充电状态在10%和90%之间,电池可以用一个大的电流充电,再生制动力比例应相应增加。当充电状态大于90%,应减少充电电流,防止电池过度充电;再生制动力值要更低。我们更倾向于将其设定为低、中、高,以及论域是[0,1]。隶属函数如图10(b)。速度:车辆速度
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147385],资料为PDF文档或Word文档,PDF文档可免费转换为Word



