一种新颖的输入序列无线控制策略 输出并联逆变器系统外文翻译资料
2022-07-20 19:44:24
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
一种新颖的输入序列无线控制策略
输出并联逆变器系统
姜小建,曹小鹏,梁才舒,宁光福,吴晨
电气工程学院先进电力转换技术与设备中心
东南大学
南京,中国
摘要:本文提出了输入串联输出并联(ISOP)逆变器系统的无线模块化控制策略,以确保组成逆变器之间输入电压和输出电流的均等分配。 与现有的ISOP逆变器系统控制策略相比,如限制系统模块性的集中控制和通过连接组成逆变器模块与多个易受干扰的共享母线实现电压和电流共享的分布式控制,降低了可靠性该系统提出的基于正输出电压幅值梯度的控制策略可以实现ISOP逆变器系统的全模块化设计。 首先根据下垂法推导出控制策略,并详细分析了控制策略的原理。 然后探讨了该策略的稳定性和设计。 最后,在实验室对双模块ISOP逆变器系统进行了测试,实验结果验证了该控制策略的有效性。
索引条款 - 输入串联输出并联,逆变器,无线,正输出电压 - 幅度梯度,稳定性。
1.介绍
模块串联并联结构是提高功率转换系统电压/电流或容量的重要途径,其中多个标准化模块在输入或输出端串联或并联。 一般而言,串并联系统可分为输入并联输出并联(IPOP),输入并联输出串联(IPOS),输入串联输出并联(ISOP)和输入串联输出并联(ISOP)系列(ISOS)[1]。 每个系统都有其特定的应用领域,例如,ISOP系统适用于高输入电压和大输出电流的场合[2]。 在串并联系统中,电源电路和控制电路都有望实现高度模块化,以提高开发周期短,维护方便和高扩展性等优点。 为了确保ISOP系统的正常运行,需要模块之间的输入电压共享(IVS)和输出电流共享(OCS)。
对于ISOP直流 - 直流转换系统,它已被广泛研究和广泛应用[3] - [4]。 此外,近年来越来越多的关注焦点集中在ISOP逆变器系统的研究[5] - [8]。 为了实现IVS和OCS,提出了三回路控制[5] [6],其中IVS由输入电压共享回路实现,同时滤波电感电流或输出的相位
这项工作得到国家自然科学基金的部分支持,奖项51677028,部分由中国江苏省自然科学基金会授予BK20161418。
978-1-5090-2998-3/17/$31.00 copy;2017 IEEE
电流保持相同以实现OCS。为了达到ISOP高频交流链逆变 器功率平衡的目标,提出了交叉反馈控制[7],然而,单 个模块的电流反馈是其他模块和控制器的滤波电感电流的 总和模块相互耦合,导致复杂的控制系统和较低的模块性。 事实上,所有的控制方法都有一个共同的输出电压回路, 所有模块共享一个中央控制单元[5] - [7]。 为了提高 ISOP逆变器系统的可靠性,计算出一个分布式控制[8], 其中控制单元分布在每个模块中。 尽管如此,三种共享 总线对于每个模块都是必不可少的,当共享总线受到干扰 或失效时,ISOP逆变器系统将陷入瘫痪。 因此,有必要 取消模块之间的互连以获得具有高可靠性的冗余系统。
众所周知,无线下垂控制可用于实现IPOP转换系统的OCS [9]。 受到IPOP逆变器系统中的下垂控制,无线IVS和
文中提出了基于正输出电压 - 幅度梯度的ISOP逆变系统的OCS控制策略。 在所提出的控制策略中,每个模块都有其独立的控制电路,模块之间没有互连,因此ISOP逆变器系统实现了完全模块化的设计和更高的可靠性。 理论和实验分析验证了所提出的控制策略的有效性。
2.基于正输出电压幅度渐变的无线IVS和OCS控制策略
下垂控制被广泛用于实现IPOP逆变系统的OCS。 对于具有电阻阻抗的逆变器,下垂控制方程为[10]
=-
=- (1)
其中和分别是输出电压的初始幅度和频率参考,和分别是j#逆变器的幅度和频率参考,和分别是有功功率共享回路和无功功率共享回路的增益。
但是,对于ISOP逆变器系统,IPOP逆变器系统的传统下垂控制对于ISOP系统是不可行的。在
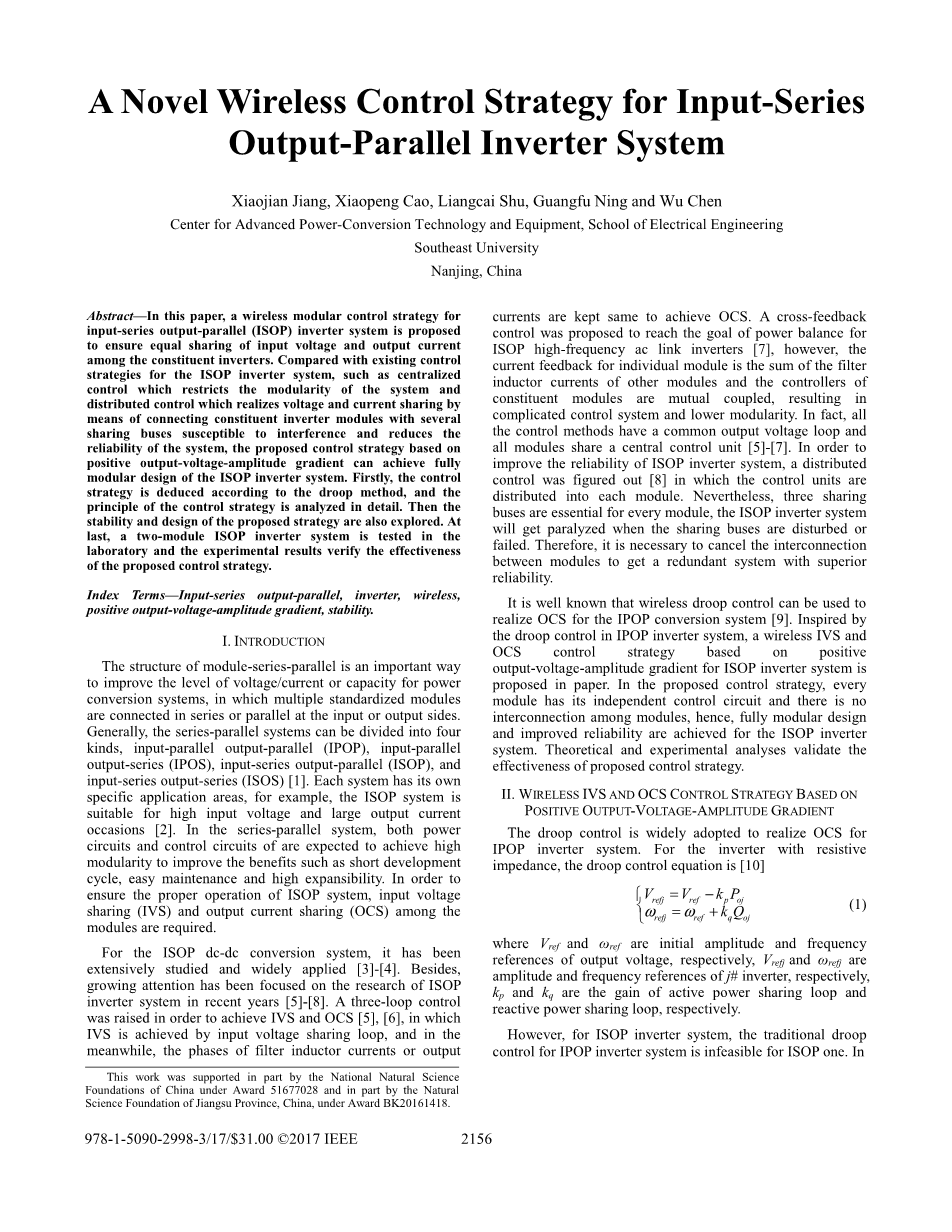
图1.基于正输出电压 - 幅度梯度的无线IVS和OCS控制策略的特 性曲线。
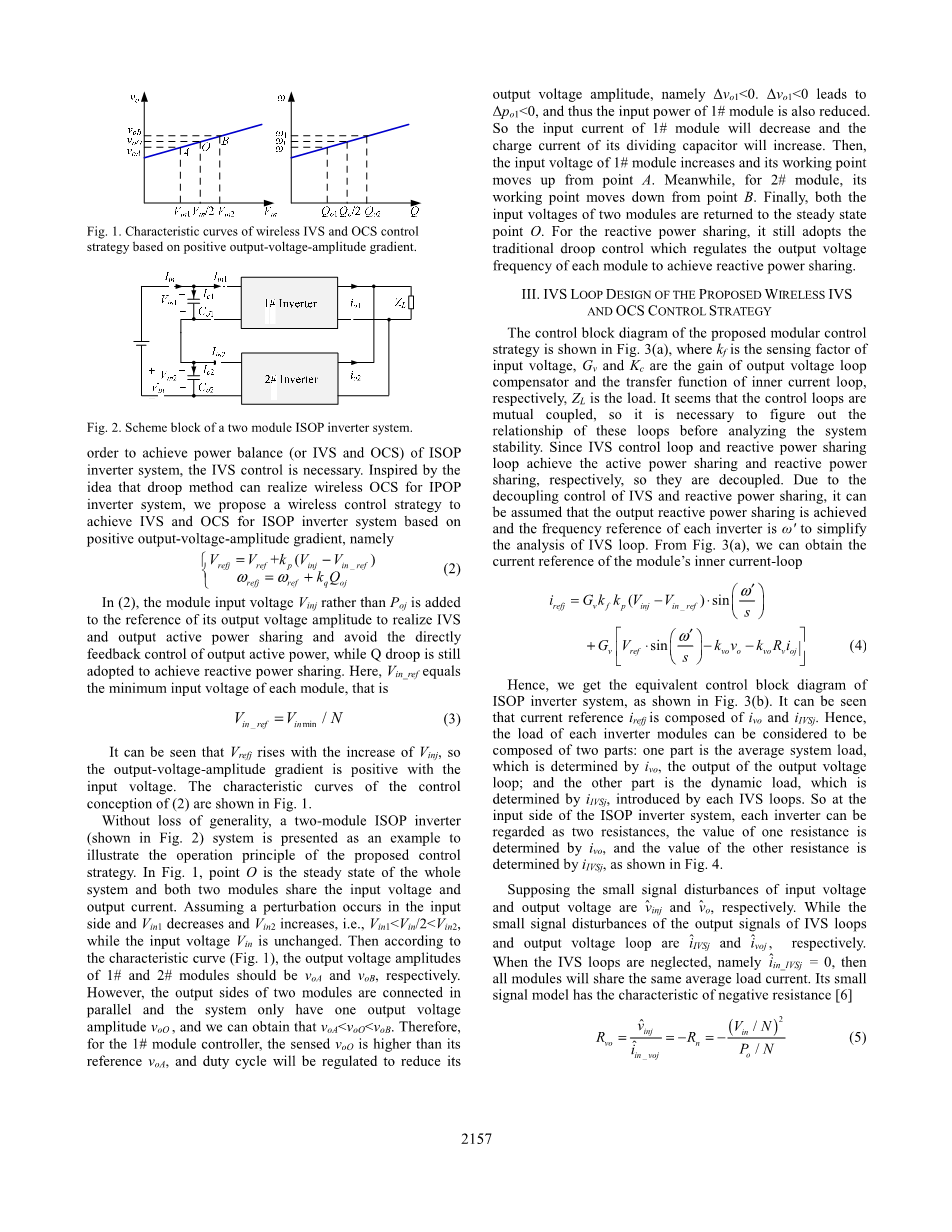
图2.双模块ISOP逆变器系统的方案模块。
为了实现ISOP逆变器系统的功率平衡(或IVS和OCS),IVS控制是必要的。受下垂法可实现IPOP逆变系统无线OCS的思想的启发,提出了一种基于正输出电压 - 幅度梯度实现ISOP逆变系统IVS和OCS的无线控制策略,即
= (-)
= (2)
在(2)中,模块输入电压而不是被加到其输出电压幅度的基准上以实现IVS并输出有功功率共享,避免了对输出有功功率的直接反馈控制,而Q仍采用下垂方式实现无功分享。 这里,等于每个模块的最小输入电压,即
= /N (3)
可以看出,随着的增加而上升,所以输出电压 - 幅度梯度对于输入电压是正的。(2)的控制概念的特性曲线如图1所示。
在不失一般性的情况下,以两模块ISOP逆变器(如图2所示)为例来说明所提出的控制策略的工作原理。 在图1中,点O是整个系统的稳定状态,两个模块共享输入电压和输出电流。 假设输入侧发生扰动,输入电压不变,输入电压减小,Vin2增加,即Vin1lt;Vin/ 2 lt;V 。 然后根据特性曲线(图1),1#和2#模块的输出电压振幅分别为vOA和vOB。 然而,两个模块的输出端并联,系统只有一个输出电压幅值vOO,我们可以得到vOAlt;vOOlt;vOB。 因此,
对于1#模块控制器,检测到的vOO高于其参考电压vOA,并且将调节占空比以降低其输出电压幅度,即ǻvo1lt;0。 ǻvo1lt;0导致(po1lt;0,因此1#模块的输入功率也降低。 因此1#模块的输入电流会减小,其分压电容的充电电流会增加。 然后,1#模块的输入电压增加,其工作点从A点向上移动。同时,对于2#模块,其工作点从B点向下移动。最后,两个模块的输入电压都返回到稳态状态点O.对于无功功率共享,仍然采用传统的下垂控制,调节各个模块的输出电压频率实现无功功率共享。
3.无线IVS和OCS控制策略的IVS环路设计和OCS控制策略
所提出的模块化控制策略的控制框图如图3(a)所示,其中kf为输入电压的感测因子,Gv和Kc为输出电压环路补偿器的增益和内部电流回路的传递函数分别为ZL为负载。 看来控制回路是相互耦合的,因此在分析系统稳定性之前,有必要弄清楚这些回路的关系。 由于IVS控制回路和无功功率共享回路分别实现有功功率共享和无功功率共享,因此它们是解耦的。 由于IVS的解耦控制和无功功率共享,可以假设实现了输出无功功率共享,并且每个逆变器的频率参考为Ȧү以简化IVS环路的分析。 从图3(a)我们可以得到模块内部电流回路的电流基准
因此,我们得到了ISOP逆变器系统的等效控制框图,如图3(b)所示。 可以看出,电流参考irefj由ivo和iIVSj组成。 因此,每个逆变器模块的负载可以被认为由两部分组成:一部分是平均系统负载,其由输出电压环路的输出ivo确定; 另一部分是由每个IVS环路引入的iIVSj确定的动态负载。 因此,在ISOP逆变器系统的输入端,每个逆变器可以看作两个电阻,一个电阻值由ivo确定,另一个电阻值由iIVSj确定,如图所示在图4中。假设输入电压和输出电压的小信号干扰分别为v注射和vo。 而IVS回路和输出电压回路输出信号的小信号干扰分别为iIVSj和ivoj。 当忽略IVS环路,即iin_IVSj= 0时,所有模块将共享相同的平均负载电流。 其小信号模型具有负阻特性[6]
|
图3. ISOP逆变器系统的控制框图。 (a)所提出的控制策略的控制框图。 (b)等效控制框图图2. ISOP逆变器系统的控制框图。 (a)所提出的控制策略的控制框图。 (b)等效控制 |
其中Po是系统输出有功功率的框图。
从图3(a)可以看出,相应模块输入电压扰动引入的模块输出电压幅值基准的扰动可表示为
假设输出电压回路带宽较宽,模块输出电压幅值扰动为
通过输出阻抗的电阻设计,模块的输出有功功率可以表示为[10]
结合式(7)和式(8),模块输出电压振幅扰动引入的模块输出有功功率扰动为
另一方面,模块输入功率可以根据图4获得,即
我们得到(10)中的稳态项并忽略(10)的二阶项
图4. ISOP逆变器系统的等效小信号模型
图5.动态调整过程的仿真波形
假设每个子模块的转换效率为100%,通过节能,输入功率扰动等于输出有功功率扰动
(9)和(11)替换为(12),产出
(5)代入(13),我们得到了
公式(14)表明,IVS的作用相当于在每个模块的输入端引入一个正电阻RIVSj。 这个正电阻与上述负电阻并联。 因此,每个逆变器模块的等效输入阻抗为
为了确保ISOP逆变器系统的稳定性,每个逆变器模块的等效输入阻抗应呈现正阻特性,即,
因此,稳定的条件是
(5)和(14)替换为(17),产出
其中Po_max和Vin_min分别为系统的最大输出有功功率和系统输入电压的最小值。 kp_min是可以保持系统稳定的IVS环路增益的临界值。 具有所提出的模块化控制策略的ISOP逆变器系统在仅满足(18)时在整个系统输入电压范围和整个负载范围内是稳定的。
4.模拟和实验结果
A.仿真结果
图5给出了当输入电压升高和降低时,双模块ISOP逆变器系统的仿真结果。 为了说明正输出电压 - 幅度梯度的动态过程,我们有意制造两个输入分压电容Cd1lt;Cd2。 可以看出,当系统输入电压升
高或降低时,模块输入电压Vin1和Vin2同时升高或降低。 在此过程中,输入电压较高的模块具有较高的输出电压幅度基准,因此输出较高的有功功率,输入电压降低并收敛到平衡状态。 在动态过程中,系统输出电压VOM的幅度随着阶跃系统输入电压而升高或降低。
图6.全阻性负载下的稳态波形。 (a)模块输入电压和输出电流。 (b)模块输入电压,系统输出电压和系统输出电流。
图7.阶跃系统输入电压条件下的实验波形。 (a)模块输入电压和输出电流。 (b)模块输入电压,系统输出电压和系统输出电流。
图8.阶跃负载条件下的实验波形。 (a)模块输入电压和模块输出电流。 (b)模块输入电压,系统输出电压和系统输出电流。
B.实验结果
为了验证所提出的控制方案的有效性,在实验室中制造了1.2kVA双模块ISOP逆变器系统。其规格如下:vo= 110Vac / 50Hz和系统输入电压Vin = 360〜440Vdc(每个模块180〜220Vdc)。
图 图6给出了全阻性负载下ISOP逆变器系统的实验波形。 我们可以看到模块输入电压和输出电流的平衡很好地实现了。 因此实现IVS和OCS,并且所提出的无线控制策略在稳定状态下有效。
图7显示了当系统输入电压升高和降低时,ISOP逆变器系统的实验波形。 可以看出,输入电压的扰动对模块输出电流的平均分配没有影响,输出电压调节良好。
图8显示了当系统的负载电流在半负载和满负载之间升降时,ISOP逆变器系统的结果。 可以发现,两个模块的输入电压的平均分配不受阶跃负载的影响。 因此,我们可以从图4中得出结论。 从图6-8可以看出,IVS和OCS可以在稳态和瞬态下有效地实现。
结论
本文提出了一种基于正输出电压幅值
全文共6356字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[8867],资料为PDF文档或Word文档,PDF文档可免费转换为Word



