基于电压预测的模块化多电平变换器模型预测控制策略外文翻译资料
2021-12-14 22:58:05
英语原文共 8 页
基于电压预测的模块化多电平变换器模型预测控制策略
林环城 王志新
上海交通大学电子信息与电气工程学院
ABSTRACT
The model predictive control (MPC) is promising for control of the modular multilevel converter (MMC)owing to its advantages in inclusion of nonlinearities and constraints for complex systems. Existing MPCmethods need to define cost functions, and the calculation burden will increase as the level of the MMCrises. This paper proposes a novel voltage predictive based MPC strategy, which combines the ac-sidecurrent and circulating current control by using forward differential voltage prediction and nearest levelapproximation. The chosen of switching states is intuitive according to the voltage predictive results,and there is no need to define cost functions. A pre-scaled voltage sorting method is used to balance thecapacitor voltages and reduce the switching frequency. In addition, circulating current hysteresis controlis introduced to further reduce the switching frequency. The performance of the proposed method isevaluated based on the simulation results of an MMC with 20 submodules per arm.
1介绍
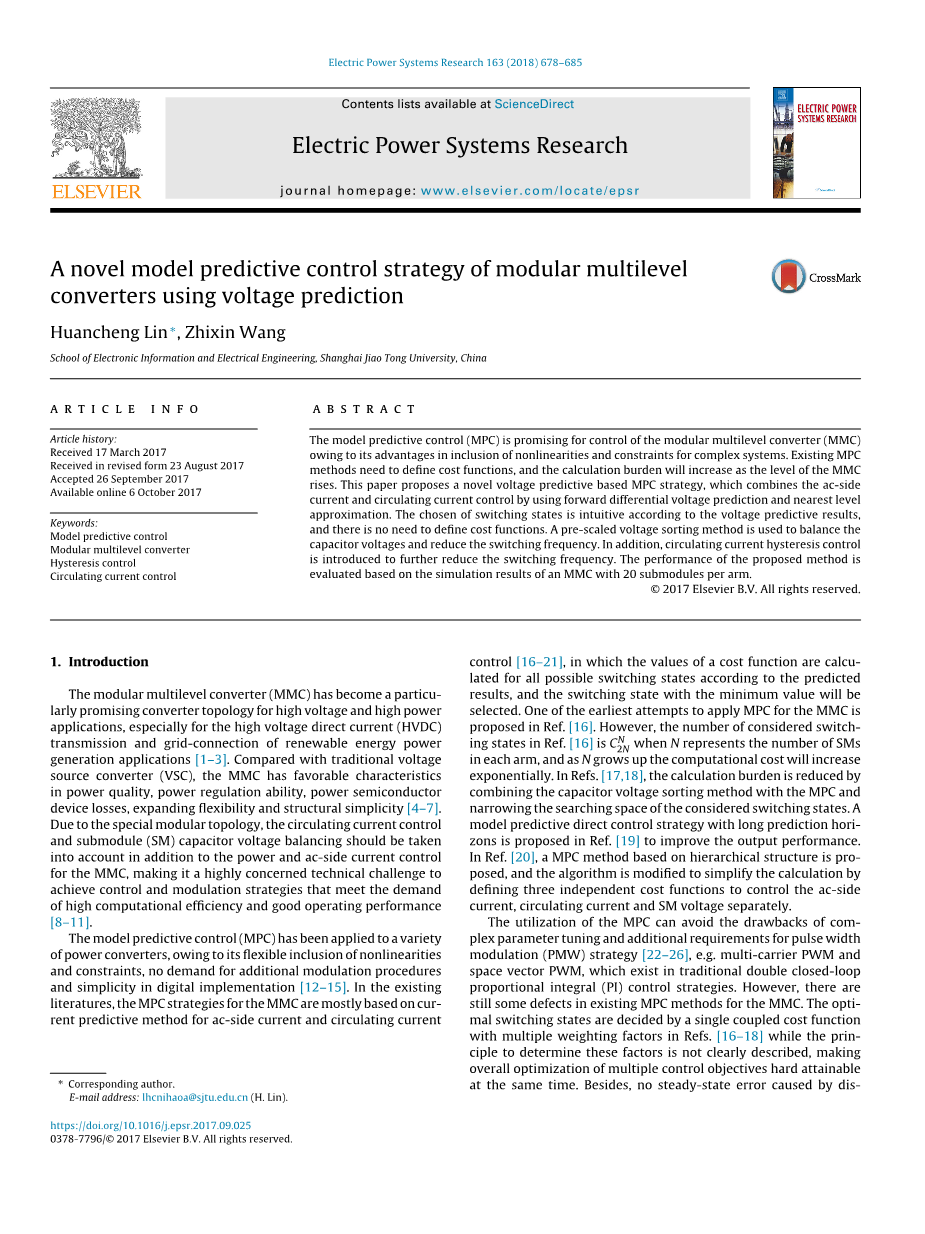
模块化多电平转换器(MMC)已成为高压和高功率应用中特别有前景的转换器拓扑结构,尤其适用于高压直流(HVDC)、可再生能源的输电和并网这一代应用。与传统的电压源转换器(VSC)相比,MMC在电能质量,功率调节能力,功率半导体器件损耗,扩展灵活性和结构简单性方面都具有良好的特性[4–7]。由于采用特殊的模块化拓扑结构,除了MMC的电源和交流侧电流控制外,还应考虑循环电流控制和子模块(SM)电容器电压平衡,这使其成为实现控制和高度控制的技术挑战。调制策略满足计算高效率和良好操作性能的要求[8–11]。
由于其灵活地包含非线性约束,无需额外的调制程序和数字实现的简单性[12–15],模型预测控制(MPC)已应用于各种功率转换器。在现有文献中,多通道矩阵控制的MPC策略主要基于交流侧电流和循环电流控制的电流预测方法[16-21],其中根据预测结果计算所有可能的开关状态的成本函数值,并求出最小值的开关状态。参考文献[16]中提出的将MPC应用于MMC是最早尝试之一。然而,参考文献[16]中考虑的开关状态数量为 ,其中n表示每个臂中的SM数量,随着N的增加,计算成本将以指数形式增加。参考文献。[17,18]通过将电容电压排序方法与MPC相结合,缩小所考虑的开关状态的搜索空间,降低了计算负担。为了提高输出性能,参考文献[19]提出了一种具有长预测水平区的AMODEL预测直接控制策略,参考文献[20]提出了一种基于层次结构的MPC方法,并通过定义三个独立的成本函数来控制交流侧流、循环,将电流SM电压分开,从而简化了算法的计算。
利用MPC可以避免复杂参数整定的缺点和对脉冲宽度调制(PMW)策略的附加要求[22–26],如传统的双闭环比例积分(PI)控制策略中存在的多载波PWM和空间矢量PWM。然而,现有的多媒体模型的MPC方法仍存在一些缺陷。在参考文献中[16–18],光开关状态是由一个具有多个加权因子的单耦合成本函数决定的。虽然确定这些因素的原则没有明确描述,但使多个控制目标的全面优化难以同时实现。
本文提出了一种新的基于电压预测的MMC模型预测控制(VP-MPC)方法。该控制方法基于前向差分电压预测和最近水平近似,结合交流侧电流控制和循环电流控制,根据ARM SM电容器电压的电流参考值和平均值,直接确定最佳切换状态。同时,为了降低开关频率和开关损耗,将动态控制引入到循环电流控制中,并配合预先定标的SM电压分选方法。该方法的可行性和有效性通过每臂20子模块的MMC仿真结果得到验证。
本文的其余部分组织如下:在第2节中,推导并建立了微型计算机的数学模型。第三章对基于电压预测的MPC方法进行了实验研究。第4节给出了仿真结果,第5节给出了本文的结论。
2 MMC的数学模型
图1介绍了三相MMC系统的框图。MMC每相由两个臂组成,上臂(上标表示)和下臂(下标表示)的每个相位传感器。每只臂都有一个等效的晶体管、一个臂电感L和N个串联的半桥子模块(SMS)。SM有两种开关状态。当开关T1接通,开关T2断开时,插入SM,SM的输出电压等于其电容电压Uc。当nt1关闭,t2打开时,SM被旁路,输出电压等于零。
图1 三相MMC系统框图
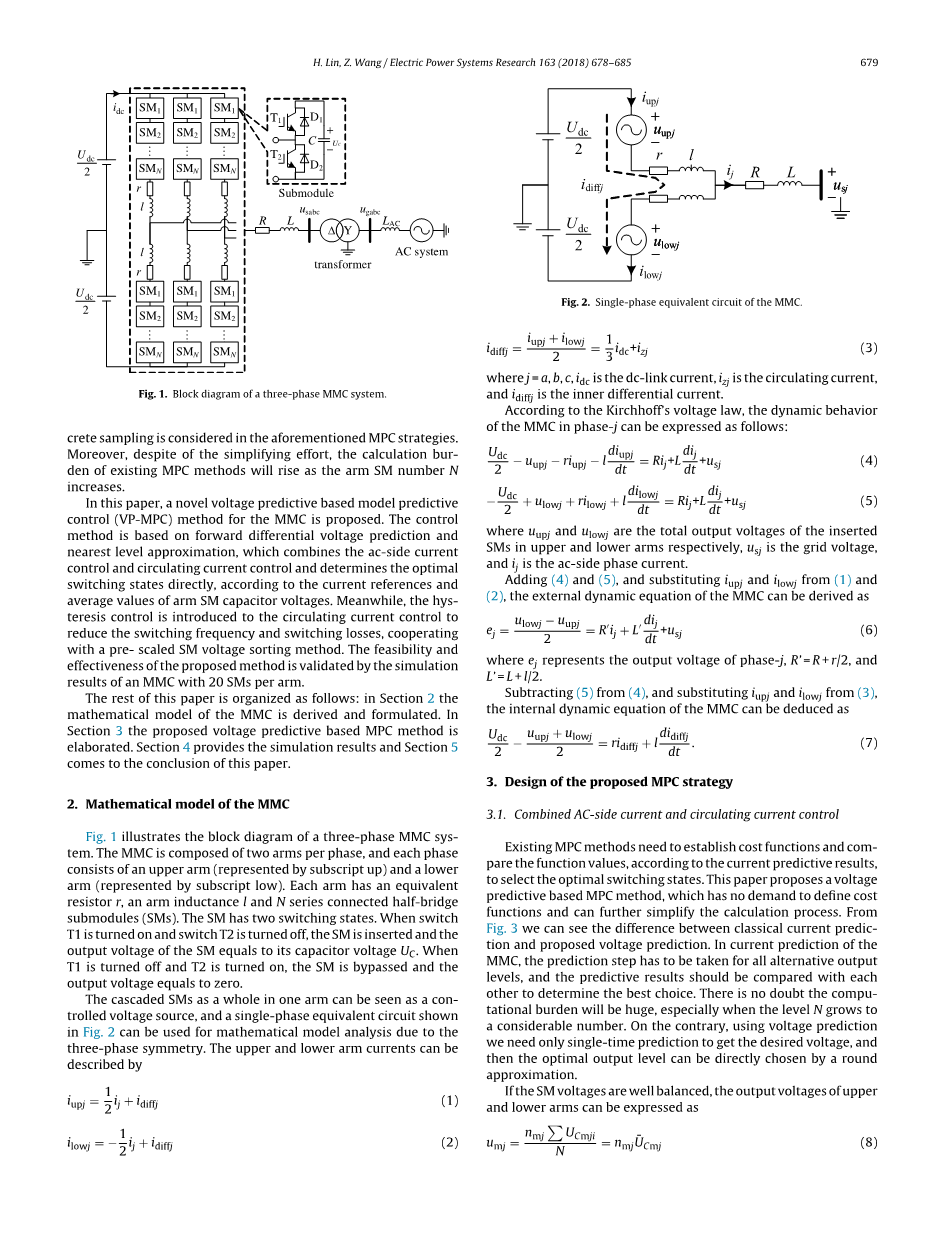
图2 MMC的单相等效电路
单臂串联的SM可以看作是一个控制电压源,图2所示的单相等效电路由于三相对称性可以用于数学模型分析。上臂和下臂的电流可以用公式表示为:
(1)
(2)
(3)
, 是直流环节电流, 是循环电流, 是内差电流 。
根据基尔霍夫电压定律,J相中MMC的动态行为可以表示为:
(4)
(5)
其中, 和 分别表示上、下臂插入式DSM的总输出电压, 表示电网电压, 表示交流侧相电流。
根据方程(1)(2)(4)(5),MMC的外部动力学方程可以推导出:
(6)
表示j相的输出的电压, , 。
综合式(4)减去式(5),并把式(3)代入,MMC的内部动力学方程为:
(7)
3 MPC策略的设计
3.1交流侧电流和循环电流联合控制
现有的MPC控制方法需要建立成本函数,并根据当前的预测结果对函数值进行比较,以选择最优的开关状态。本文提出了一种基于电压预测的MPC方法,该方法不需要定义成本函数,可以进一步简化计算过程。从图3可以看出经典电流预测和电压预测的区别。在目前的预测中,必须对所有可选输出水平采取预测步骤,并将预测结果相互比较,以确定最佳选择。毫无疑问,计算负担将是巨大的,特别是当n级增长到相当大的数量时。相反,采用电压预测,只需单次预测即可得到所需的电压,通过圆近似直接选择最佳输出电平。
如果SM电压平衡良好,上下臂的输出电压可以表示为:
(8)
其中m=up,low,nmj是每个臂中插入的SM数量,i=1,2hellip;.n是SM的数量,uCmji是SM电容器电压值, 是每个臂中电容器电压平均值。
式(8)代替(6),输出相电压的计算方法为
(9)
相位j插入SM的总电容器电压可表示为
(10)
为了使交流侧电流得到良好控制,换句话说,相电流ij 精确跟踪它们的参考ijlowast;,然后通过将一阶前向差应用于(6),我们可以获得所需的j相输出电压为
(11)
其中Ts是采样周期,usj(t)是测量的电网电压,ij(t)是测量的交流侧电流.
根据(7), 可以通过调节插入的SM的总电容器电压,来控制内部差动电流来实现循环电流控制。由于其较小的值,等效电阻r的影响可以忽略不计,如果差分电流得到很好的控制,所需的总电容电压可以计算为
(12)
将式(9)和(10)中所需的输出电压和总电容器电压代入(11)和(12),并求解方程,我们可以得出插入的上臂和下臂的sm数量,如下所示:
(14)
(13)
其中,使用圆近似法获得整数结果。在任意采样时刻,根据(11)-(14)进行一次计算,可以得到J相上臂和下臂的最佳插入SM数,这意味着交流侧电流和循环电流控制的计算负担几乎不会随着N上升而增加。
图3
3.2 预标度电压分选和开关频率降低
当确定插入的SM数量时,可根据每个臂的电压排序结果选择相应的SM,并生成门信号来完成控制。本文采用了一种预先定标的分选方法来平衡SM电容电压,降低开关频率。排序前,根据臂电流的方向及其以前的开关状态,对SM电容器电压进行预缩放。预缩放功能如下:
(15)
(16)
(17)
其中,sgn[·]为符号函数,kc为标度系数,smji(t)为SM的前一个开关状态(1表示插入,0表示旁路),uCmji(t)为SM电容器电压,UCmji(t)是SM电压后标度,εc是限制电压变化的公差因子。
预缩放后,根据uCmji(t)如果臂电流为正,SM将按升序进行排序。否则,这些词条将按降序排序。排序后,SMS的原始编号存储在一个名为索引mj的n维数组中。然后根据(13)和(14)的结果,选择与阵列中第一个 或 相对应的SM进行插入,其余的SM将被旁路。通过预缩放,先前接通的SM将变得更高 如果它们的电容器电压在容差范围内,则排队在队列中,这使得这些SM有更多机会连续插入并降低开关频率。如果电容器电压超过容差范围,它们的排名将下降然后被旁路,从而避免过大的电压变化。
在实际操作中,由于离散数字控制的非理想特性,即使在稳态过程中采用了很好的控制,电流也会产生波纹。在此基础上,将滞环控制引入循环电流控制,进一步降低开关频率。设置滞后宽度 ,当 的跟踪误差在此宽度范围内时,循环电流控制不会 被使用,意味着 被设置为 ,否则将由式(12)计算。此外,由于直流链路电流等于三相不同电流之和,因此可以设置一个超磁滞宽度 ,以避免在所选 的 值中出现过大的纹波。所以循环电流控制的条件是
(18)
通过逐步增大调谐量,可以快速获得磁滞宽度的合适参数。本文中 的磁滞宽度没有被使用,因为 很小而且对 的影响可以接受。通过这种设置,可以减少由循环电流控制引入的开关动作,从而进一步降低开关频率,几乎不影响循环电流控制的性能。
拟议的MPC方法的总体实施框图如图4所示。
图4 (a)交流侧电流和循环电流联合控制。(b)预标度电压分类和开关频率降低。
3.3 电流基准计算与校正
交流侧电流参考是根据功率指令和电网电压计算的。通过对两相静止框架的电流参考值的计算,消除了锁相环。如果有功和无功功率参考值以p*和q*给出,则电流参考值可通过以下公式计算:
(19)
其中 和 可以通过克拉克变换从测量得的电网电压得到。
在现有的MPC方法中,不考虑离散采样引起的稳态误差。由于电流参考是以正弦信号的形式给出的,理想情况下,在当前采样时刻计算的电流参考将在下一个采样时刻得到,导致稳态下实际电流和参考电流之间的时间延迟。如果相位电流参考设置为 ,,,则跟踪误差可近似表示为
(20)
式中,omega;为角频率, 为初始相位。使用lark转换 ,帧下的跟踪错误可以表示为
(21)
基于(21),当前参考可更正如下:
(22)
最终的三相电流参考值可以通过克拉克逆变换从 得到。
目前,循环电流控制策略主要有两种。最常用的一种方法是消除交流分量,以减小交流电流的均方根值。第二种是注入二次谐波电流,以进一步降低电容器电压纹波[8]。然而,注入方法将带来额外的开关动作,并显著增加臂电流的RMS值,这将增加开关损耗和传导损耗,被认为是不合适的操作[7,9]。本文的循环电流控制目标是使循环电流中的交流分量最小化。循环电流参考值是根据以下式子计算从直流侧到交流侧的有功功率:
(23)
(24)
拟用的VP-MPC方法的总体控制图如图5所示。
4 仿真结果
为了验证所提
资料编号:[5238]



