基于单目视觉的结构化道路的鲁棒车道线识别外文翻译资料
2022-07-20 20:40:00

英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
基于单目视觉的结构化道路的鲁棒车道线识别
王宝锋,齐志权,马国成
摘要:本文所呈现的是一种基于单目视觉的鲁棒车道线探测和跟踪系统。第一,车道线检测算法可以通过逆透视法将未处理图片转化成俯视图,然后从俯视图中精确检测车道线的内部。接下来这个系统会转到车道线跟踪进程,其目的是根据从上一个框架中获取的信息提取车道线。如果跟踪车道线失败,车道线检测系统将会再次被触发,直到系统识别到正确的车道线。在这个系统中,霍夫转化被运用于提取潜在的车道线标识,然后通过潜在车道线的几何分析来移除极端值。此外,断点和感兴趣区域的动态规划被用于提高精确性和效率。这个系统在不同路况下进行了测试,结论具有鲁棒性和可靠性。
关键词:车道线检测;车道线追踪;逆透视法;感兴趣区域动态规划
路面感知是先进驾驶员辅助系统的至关重要的组成,例如车道线偏离警告系统、换道辅助和自动驾驶。车道线感知是关于运用一些路面几何学知识来定位路面上的车道线标志或边界的问题,它由两个部分组成:车道线检测和车道线跟踪。人们在车道线感知上做了大量的研究,并提出了各种检测方法。这些方法假定在接近的区域中车道线是直的,同时霍夫转换在寻找用于车道线提取的直线上效率很高。然而在使用霍夫转换的时候,原始图片上会有很多噪音来干扰车道线提取,例如树木、护栏、行人、行车和影子,经典的霍夫转换是一种估值计算。为了消除噪音并且减少估值差,感兴趣区域被用于车道线提取。但是感兴趣区域是在实验的基础上人为设定的。不幸的是,基于霍夫转换的车道线提取不能被当作车道线标志或者边界线,因为那其中包括了许多异常值。为了解决这个问题,人们提出了一些方法。基于灰度直方图的车道线检测被应用于确定提取的车道线。逆透视法被用于将原始图片转化为具有平行并垂直的车道线的俯视图,其中的几何特征被用于确定该提取的车道线。但是由于逆透视法需要计算,处理速度比较慢。基于颜色分割的方法被用于在色彩空间确认车道线标识,但是它们对于来自路灯和其他光源的环境光很敏感。立体视觉也被用于车道线检测,通过在投影上修正搜索区域来改善检测结果。
本文呈现了一种运用感兴趣区域动态规划的车道线检测追踪技术。基于逆透视法和几何分析,正确的车道线会从俯视图中被提取出来。然后系统会运行到车道线追踪阶段,这阶段是在原始图片上进行操作。根据上一个框架的信息(断点和车道线斜率),就能确定感兴趣区域。然后正确的车道线通过运用theta;定位的霍夫转换和车道线标识检验被提取出来。如果跟踪阶段失败了,系统将会返回到车道线识别阶段,直到正确的车道线被再次检测到。
车道线检测
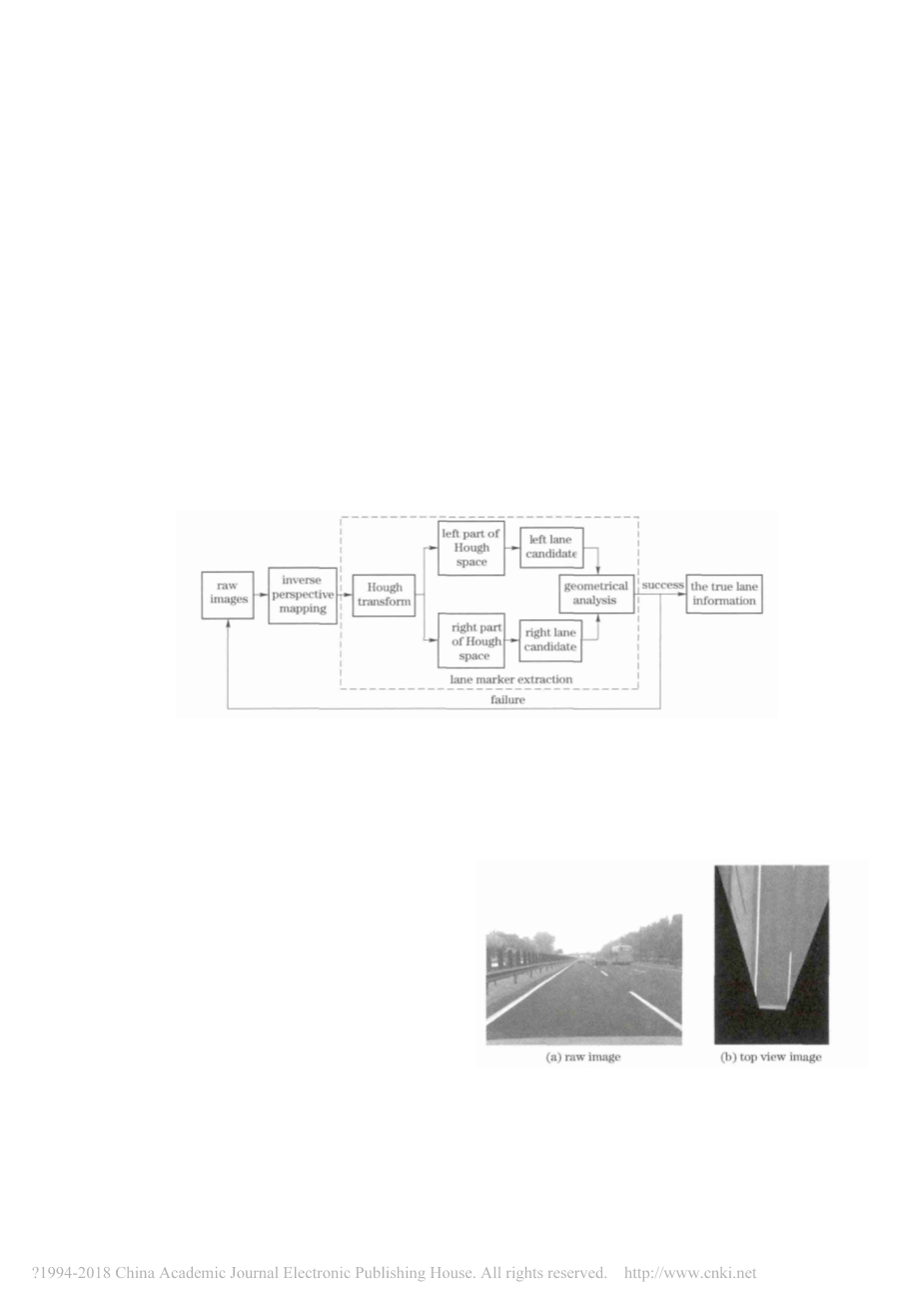
推荐的车道线检测算法结构如图1。首先,原始图片经过逆透视法转变成俯视图。其次,俯视图经过轮廓强化处理后变成二值图像。然后,theta;定位霍夫转换被用于提取潜在的车道线标识。最后,正确的车道线在经过几何分析后被找出。接下来的部分将会详细描述这个算法的各部分。
图1 车道线检测算法结构
-
- 逆透视法
相较于从车载照相机获取的原始图片,从俯视图片上检测车道线更简单,理由如下:
①结构化道路的几何特征可以被用于在俯视图片中找寻正确的车道线标识。打个比方,车道线是与地平线上的摄像头光学轴平行(或者几乎平行),车道线宽度取决于一般常量法。
②逆透视图片展示了车辆前方附近的具体俯视图,图中有很大的可能性具有主车道线。因此感兴趣区域在最初的异常值被物理消除后就确定下来了。
为了获取俯视图,我们预先设定一个矩形区域l米times;w米(l是该区域的长度,w是该区域的宽度),这个矩形区域与运载体坐标系的纵轴轴对称,这个坐标系在车辆前方的地平面上。图2展示了原始图像和俯视图。纵向距离l是如此短以至于弯曲的车道线可以在俯视图中被当作笔直的平行线。
(a)原始图片
(b)俯视图
图2 逆透视法
-
-
车道线标识提取
- 轮廓检测
-
车道线标识提取
被转换的俯视图接下来会进行轮廓加强处理用于得到二值化图像(图3)一般情况下,人们认为车辆沿着道路行驶的时候,摄像头被用于监测前方道路,它所采集到的车道线斜率beta;代表摄像头光学轴线和车辆纵向轴线在地平线上的夹角应该接近于0。
图3 边缘处理后的俯视图
-
-
- theta;定位的霍夫转换
-
霍夫转换在检测直道线上具有高效性。这种理论在参考文献13中被阐明。任何直线在霍夫空间中都由(theta;,rho;)坐标点表示,theta;意味着直线和坐标系x轴的夹角,rho;意味着图像相关区域和直线间的距离,正如图4所示。累计最大(theta;,rho;)坐标点意味着图片空间中最明显的一条直线。因此,在二值图像中的车道线提取可以通过寻找霍夫空间中累计值最大的(theta;,rho;)点来完成。
图4 theta;,rho;定义
在边缘处理后的俯视图中,车道线斜率在上一个步骤中用beta;来代表,因此theta;的范围在接下来的霍夫转换中可以被认为在[beta;-Delta;theta;,beta; Delta;theta;]中(Delta;theta;是一个足够小的量,让被检测到的车道线接近于互相平行)。所以,斜率在这个范围之外的车道线都会被剔除,霍夫转换的估值按比例降低了(1-2Delta;theta;)/pi;,并且被提取的车道线基本都是车道线标识,正如图5所示.
(b)theta;定位霍夫转换
(a)经典霍夫转换
图5 经典霍夫转换和theta;定位霍夫转换的比较
-
-
- 左&右车道线提取
-
俯视图的霍夫空间被值为(0,omega;/(2d))纵向轴线(theta;,rho;)划分为左、右两部分。各自独立地,从左边和右边的霍夫空间中提取10个高值线。从左霍夫空间中的10个高值中选取的具有最大rho;值的直线被认定为可能的左车道线标识,与此同时,从右霍夫空间中的10个低值中选取的具有最小rho;值的直线被认定为可能的右车道线标识。
-
- 可能车道线的几何分析
结构化道路有两个几何特征:
①车道线标识几乎平行。
②车道宽度即车道线标识内部左边和右边的距离是在一定法律范围(omega;min,omega;max)内(在中国,这个范围是2.5-3.75米)。
鉴于被检测到的可能车道线的平行特征已经在霍夫转换中根据Delta;theta;进行预设,如果车道线宽度在范围内的话,左和右可能车道线就会被认为是正确车道线。可能车道线的宽度Wl可以被描述为:
Wl=(rho;r-rho;l)d (3)
其中rho;r是右可能车道线的rho;值,rho;l是左可能车道线的rho;值,d是一个像素的长度。
当系统开始时,车道线检测系统将会一次又一次的循环直到正确的车道线被找到,正如图6a所示。最后,正如图6b所示,被检测到的正确车道线被转换成具有断点(被检测车道线的交叉点)和车道线斜率都经过计算的原始图片。
(a)俯视图
(b)原始图片
图6 车道线检测结果
车道线跟踪
虽然车道线检测算法在检测方面十分有效,但由于需要进行逆透视法转换,它的计算量很大。基于上一个检测框架的高效跟踪算法被提出并直接应用于接下来需要被处理的原始图片。图7是车道线跟踪的流程。这些流程将会在接下来的部分被详细描述。
图7 车道线跟踪算法结构
-
- 感兴趣区域动态规划
被边缘处理的二值图片将被断点分割为四个分部,正如图8所示。根据断点和透视理论的定义,左和右车道线标识分别存在于分部C和分部D中。本文认定两个连续的框架没有什么区别,所以上一个框架中的感兴趣区域规划可以被用于目前的框架。
根据上个框架的被检测的车道线的theta;值,我们缩放连续的C和D分部在一个角度范围Delta;phi;,正如图9所示。接下来,例如树木、护栏等其他车道线和车辆都有效地被移除。
一般来说,所有可能车道线标识都在单目视觉摄像头所获得的图片的中间区域。为了节约计算次数同时降低因外界干扰所造成的复杂且错误检测导致的计算量,与此同时,随机抽样一致性算法技术在不规则曲线匹配的缺陷和霍夫转换模式的缺点相似。
图8 连续断点
基于矩形和假警报的预期数量的最佳逼近(NFA)约束,一种快速的直线部分检测算法会产生精确的结果同时控制错误探测数据的数量。直线部分检测算法的关键步骤将会在下方中展示。
-
- 可能车道线标识提取
正如车道线检测,theta;定位霍夫转换再次被应用于提取感兴趣区域中连续的C和D分部的可能车道线。为了降低计算量同时提高精确度,theta;根据上一个框架的结果被限制在一个范围内。提取结果如图10。
- C分部缩放
(b) D分部缩放
图9 连续缩放
图10 可能车道线标识提取
-
- 确定车道线标识
在步骤2.2中,两个车道线标识的内部从可能车道线中被提取出来。将内部车道线标识作为参照物,这不仅使检测算法更加精确,而且提高了视频流中线条描绘的稳定性。然后将两条内部线条通过逆透视法转换到世界坐标系中,接下来它们的几何特征(平行和车道线宽度)被用于鉴定它是否是正确的车道线。经过计算的被提取的车道线间的车道宽度和角度被用于根据表1校核结果,在这个表中1表示成功,0表示失败。
表1 车道线标识真值表
|
车道线宽度/米 |
角度/° |
|
|
0~1.5 |
>1.5 |
|
|
0~2.5 2.5~3.75 gt;3.75 |
0 1 0 |
0 0 0 |
-
- 断点检测
在步骤2.2中的已经完成的两条内部车道线的交叉点一定是理论上的断点。然而在步骤2.2中,根据可能车道线检测,更鲁棒的能去获得断点。首先,被检测过的每个连续可能车道线是成对交叉的。然后一组交叉点被平均化来获得断点Pv如下式:
(4)
其中N是交叉点的数量,(xi,yi)代表在图片系空间中交叉点i的位置。在获取断点之后,它被用于步骤2.1中来划分原始图片成四个分部。
图11 车道线识别阶段转变
实验
本文用Matlab 2012a软件编写了车道线检测和跟踪系统。为了核定上文提出的算法,本文用安置于后视镜的752times;480,30帧率的单目摄像头录制视频来测试车辆。图12展示了部分视频录制过程,经过计算的两条被检测的车道线标识车道宽度和角度根据表1来进行处理。当车道线跟踪失败,车道线检测系统将会再次被触发直到找到正确的车道线标识。在不同情况下的不同路况都被包含在视频中。结论证明这个算法在许多具有挑战性的场景中具有鲁棒性。正如图12所示,在具有低亮度、高亮度、有车经过、曲线和标识的场景中,虚线和实现都能被检测到。
图12 在不同具有挑战性的场景下的检测结果
结论
本文提出了一种具有鲁棒性的车道线检测和跟踪系统。预设区域中的俯视图有效降低了噪声同时使车道线检测更准确。基于断点和由上一个框架定位的theta;定位霍夫转换的感兴趣区域动态规划降低了车道线跟踪的计算量。最后,通过分析几何特征,可能车道线被确定下来。实验结果表明这个系统具有可靠性并且适用于多种场景。
但是为了某个场景搭建的模型可能会在别的场景中失效,这使基于模型的方法更缺少适应性。因而,车道线检测的精确度取决于模型和实际道路场景的通用性。
在结构化
全文共6263字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[8768],资料为PDF文档或Word文档,PDF文档可免费转换为Word



