无人驾驶中路由行径技术发展研究开题报告
2020-02-10 22:43:09
1. 研究目的与意义(文献综述)
论文的目的:
无人驾驶是未来汽车技术发展的重要领域,本论文目的在于对路由行径技术的发展进行研究,路径规划系统作为无人驾驶车辆重要子系统,主要任务是要完成对驾驶环境的建模和对行驶路径的搜索,通过以下几个部分展开,系统介绍无人驾驶技术各大模块,分析和论述系统中各个层级之间的任务分配和协作关系。探究无人驾驶中路由行径技术的发展现状,对相关的研究成果和发展水平进行介绍和分析,分析目前在无人驾驶车辆领域所遇到的问题,以及通过a*算法实现路由行径。
论文的意义:
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
2. 研究的基本内容与方案
基本内容:
(1)对无人驾驶技术各大模块全面介绍,包括高精度地图,定位,感知,预测,规划,控制。各大模块的相关硬件及实现原理。
(2)系统研究无人驾驶中路由行径技术的发展现状。
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
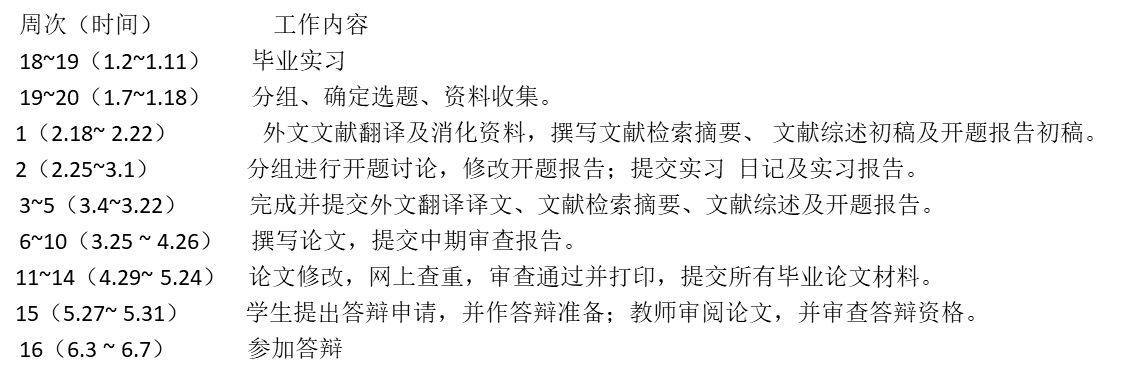
3. 研究计划与安排
4. 参考文献(12篇以上)
[1] 张梦巍.智能无人驾驶车辆路径跟踪及底层控制方法研究[d].沈阳理工大学,2018.3.
[2] 康俊民.城市环境下无人车自主定位关键技术研究[d].长安大学,2016.
[3] 庄雷雨.典型路况下无人驾驶车辆局部路径规划方法研究[d].武汉理工大学,2017.5.
剩余内容已隐藏,您需要先支付 10元 才能查看该篇文章全部内容!立即支付



