基于DSP的四足机器人单腿控制系统设计毕业论文
2020-02-17 20:45:21
摘 要
在如今科学技术蓬勃发展的时代,四足机器人逐渐成为了机器人研究领域的一项热门,其未来强大的功能和潜在的社会价值都是可以预见的。
本文以四足机器人机械单腿为研究对象,先参考了生物犬类腿部骨骼结构和运动特性,以结构相似、运动相似、低惯量为设计原则,设计出机械腿的肢段结构,并对其进行了运动学分析。四足机器人机械单腿采用两个独立的无刷直流电机控制系统,一个控制机械腿的髋关节,另一个控制机械腿的膝关节,两台电机置于髋部之上。无刷直流电机的控制系统以TMS320F28335 DSP作为控制器,搭配三相星型联接全桥驱动电路,采用速度-电流双闭环控制策略,PID算法采用增量式算法。
在此控制框架下,先后用软件建模仿真和硬件实验的方法,实现了电机的控制,并验证了控制系统的速度响应、稳定性、抗干扰能力等,得到与理论分析相近的结果。
本文的研究成果为以后在足式机器人和电机控制领域的学习打下了重要的基础。
关键词:四足机器人;机械单腿结构设计;无刷直流电机;DSP;双闭环控制
Abstract
In the era of booming development of science and technology, quadruped robot has gradually become a hot topic in the field of robot research. Its powerful functions and potential social values can be predicted in the future.
This paper takes the mechanical single leg of quadruped robot as the research object, first referred to the biological dog leg bone structure and motion characteristics, with the structure similar, movement similar, low inertia as the design principle, made a design of the mechanical leg segment structure, and analysed its kinematic performance. The mechanical single leg uses two independent brushless dc motor control systems, one for them controls the hip joint of the robot leg and the other for the knee joint of the robot leg. The two motors are placed on the hip. The motor control system takes F28335 DSP as the controller, three-phase star-connected full-bridge drive circuit as the driver, adopts the speed-current double closed-loop control strategy, and the PID algorithm adopts the incremental algorithm.
Under this control framework, the control of the motor is realized by software modeling、 simulation and hardware experiment successively, and the speed response, stability and anti-interference ability of the control system are verified. The results are close to the theoretical analysis.
The research results of this paper lay an important foundation for the future study in the field of foot robot and motor control.
Key Words:quadruped robot; mechanical single leg structure design; brushless DC motor; DSP; double closed loop control
目 录
第一章 绪论 1
1.1研究背景与意义 1
1.2四足机器人国内外研究现状 2
1.2.1国外研究现状分析 2
1.2.2国内研究现状分析 3
1.3研究的主要内容和目标 3
1.4本文主要结构 4
第二章 四足机器人机械单腿结构设计及运动学分析 5
2.1犬类腿部生理结构和关节运动特点分析 5
2.1.1犬类腿部生理结构 5
2.2.2犬类腿部关节运动特性 5
2.2四足机器人机械单腿结构设计 6
2.2.1设计原则 6
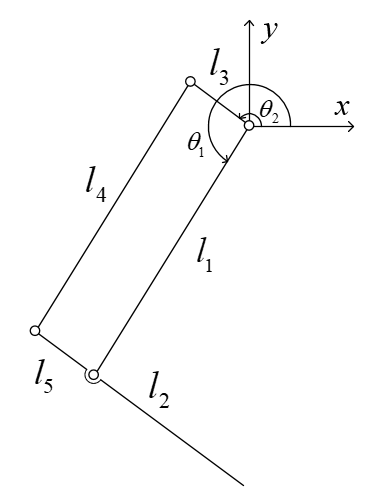
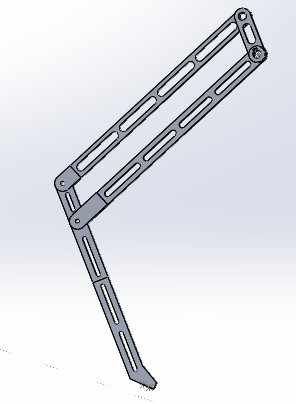
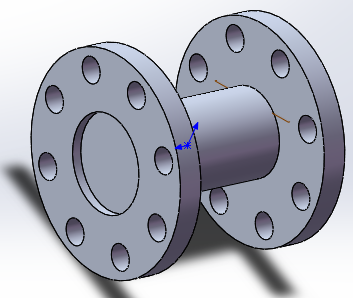
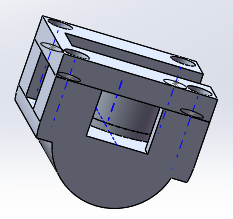
2.2.2四足机器人机械单腿结构及各项参数的确定 6
2.3四足机器人机械单腿运动学分析 10
2.3.1四足机器人的正向运动学分析 10
2.3.2四足机器人的逆向运动学分析 11
2.4本章小结 12
第3章 四足机器人机械单腿的控制系统设计 13
3.1无刷直流电机内部结构及控制原理 13
3.1.1无刷直流电机内部结构 13
3.1.2无刷直流电机驱动原理 14
3.2基于DSP的无刷直流电机控制系统控制方案 15
3.2.1基于DSP的无刷直流电机控制与驱动电路 15
3.2.2无刷直流电机双闭环控制策略 16
3.3基于MATLAB的无刷直流电机控制系统建模与仿真 18
3.3.1控制系统开环数学模型计算及分析 18
3.3.2控制系统的Simulink建模和仿真 21
3.4控制系统的硬件电路及控制信号波形配置 24
3.4.1控制器和驱动器的选择及电路连接 24
3.4.2控制信号波形配置 26
3.5控制系统软件程序设计 28
3.5.1主程序设计 29
3.5.2 eCAP捕获中断服务程序设计 29
3.5.3 ADC采集中断服务程序设计 31
3.6本章小结 32
第四章 无刷直流电机的DSP控制实验 33
4.1无刷直流电机测速实验 33
4.2 PWM信号检测实验 34
4.3相电流检测实验 35
4.4霍尔信号检测实验 35
4.5三相反电动势采集实验 36
4.6本章小结 36
第五章 总结与展望 37
5.1总结 37
5.2展望 37
参考文献 39
致谢 41
第一章 绪论
1.1研究背景与意义
随着计算机技术、电子技术、网络技术、人工智能算法等相关科技的不断进步,机器人技术迎来了蓬勃发展的时期,在诸多领域都有着十分广阔的应用前景。未来,人们将对机器人有着长期的刚性需求,人们也期待机器人能不断地为人类提供更多样、更高效的服务。因此,机器人技术的研究已经逐渐从工业领域扩展到了医疗、教育、服务、娱乐、军事等诸多领域,机器人产业也将逐渐渗透到生活中的方方面面。研究机器人技术对未来有着非常重要的社会价值[1-2]。
移动机器人是机器人研究里的一个重要的内容分支,按照其移动方式的不同,大体可以划分为两个类别;由现代车辆技术发展而来的轮式机器人(包括履带式)和基于仿生技术的运动仿生机器人(足式、蛇形、扑翼飞行等)。其中轮式和足式机器人的研究较为广泛。但传统的轮式、履带式机器人使用场景局限性较大、转弯半径大、容易打滑、不够平稳,且对地形的要求高,对高低落差较大的地形显得无能为力。而足式机器人几乎可以适应各种复杂地形,能够跨越障碍,有着良好的自由度、动作灵活、自如、稳定。因此,近些年来,越来越多的机器人研究转向了足式机器人。足式机器人有双足式,四足式,六足式等,其中,四足机器人又以其拥有灵活简单的结构、较强的承载能力、良好的稳定性能等优点,更受研究者的青睐。
对于四足机器人的系统性研究,我国起步晚于美国三十年,国内的研究成果也与机器人领域强国有着较大的差距。国外已经涌现了例如Big Dog、MIT Mini Cheetah、ANYmal等一系列具有代表性的四足仿生机器人。而国内政府也在不断地重视四足机器人的研究,在政策的引导下,各高校和科研单位积极探索机器人方向的研究。上海交通大学、清华大学、哈尔滨工业大学、山东大学、浙江大学相继出了一系列科研成果,极大地推动了我国四足机器人的发展。
机械单腿是四足机器人的重要支撑部位和运动部位,它的结设计构与控制系统决定着整个机器人的动态性能的好坏。结构方面,腿部结构形式、各肢段连杆的长度、各关节角的范围、自由度的数量等都对整个四足机器人运动的灵活度、平稳度以及控制难度有着至关重要的影响。而控制系统则很大程度上影响着整机的运动精确性、作业的平稳性以及操作的简易性。因此,合理的机械腿部设计是让四足机器人拥有良好动态性能的前提,而控制系统的响应速度与稳定性则是四足机器人实现期望运动和各种功能的先决条件。
本文将基于生物犬的腿部生理结构与运动特点,合理地设计出一套结构灵活简单、运动传递平稳、低惯量的四足机器人单腿。在结构的基础上,合理地选择控制器、驱动器以及驱动单元,设计出一套具有响应迅速、稳定精确的控制系统,并完成一套控制算法实现电机的运动。本文围绕着机械单腿的结构与控制展开研究,其过程可为未来四足机器人整机的研究做知识和技术的储备,同时研究成果也可为未来整机的运动提供一个理论的基础。
1.2四足机器人国内外研究现状
人类对足式机器人的探索最早可追溯到1495年,达芬奇在其手稿中设计了一款仿人形的机器人,该设计手稿于1950年代被发现。在达·芬奇留下的设计草图中,该机器人靠风能和水力驱动,被设计成一个骑士的模样,身穿德国—意大利式的中世纪盔甲。1893年,美国学者Rygg设计出了一款采用纯机械的人工控制方式来驱动的机械马,使其能在平坦路面运动。1899年,Muybridge使用连续摄影的方法获得了生物的行走步态,自此拉开了国际上对足式机器人探索和研究的序幕。
1.2.1国外研究现状分析
早在20世纪60年代初,国外学者便开始了对足式机器人的探索。在1960年,美国研究员Shigley 提出采用联动机构,包括四杆机构、凸轮机构、缩放机构, 作为腿式机器人的运动机构,腿部的运动则由一组双摇杆机构控制[3]。80年代初,美国麻省理工人工智能实验室的Marc Raibert研制了具有动态稳定能力的单腿跳跃机器人。与此同时,日本东京大学的Miura和Shimoyama也对足式机器人进行了深入的系统性研究,并于1984至1987年间,研发出了名为Collie的系列机器人,可实现踱步、小跑等步态。随后,日本东京工业大学研制出的TITAN系列机器人是机器人发展史上的一个里程碑。它安装了传感器,并装有智能步态控制系统,可根据传感器的信息实现静态地形自适应步行。20世纪末21世纪初,麦吉尔大学研制出Scout系列四足机器人,采用优化的结构设计,使用尽量少的驱动器,实现了平坦地面快速动态运动。2005年,波士顿动力发布了具有跨时代意义的四足机器人Big Dog,成功实现了复杂地面的稳定行走,且在受到侧向强扰动的情况下仍能保持其整体机器人的平衡,该产品使其公司名震一方。接下来十余年里,波士顿动力又相继发布了LS3、猎豹、野猫和Spot等一系列机器人均获得了外界的强烈反响。MIT仿生机器人实验室也一直致力于足式机器人的研究,其于2012年发布的猎豹机器人在跑步机上奔跑的视频显示其平均速度可达45km/h,是当前四足机器人可达的已知最大速度。MIT于2019年发布的MIT Mini Cheetah第一次实现了四足机器人的后空翻技巧。2018年,瑞士苏黎世联邦理工大学机器人系统实验室研制出了名为 “ANYmal” 的四足机器人,可以开门,乘坐电梯,甚至被推倒后,仍可继续移动。



图1.1 Big Dog(左)、ANYmal(中)、MIT Mini Cheetah(右)四足机器人
1.2.2国内研究现状分析
我国对四足机器人的探索较晚,于20世纪90年代才开始了对其进行研究。1996年,上海大学研发出了名为JTUWM-III的四足机器人,完成了静、动步态下的运动分析和控制。2004年清华大学推出的Biosbot四足机器人,实现了多种步态的切换。2007年,哈尔滨工业大学研发了轮式-足式切换的四足机器人,实现了不同环境下的适应性。2017年,上海大学研究生王兴兴和其团队研发出了四足机器人Laikago,掌握了跑跳、爬梯子、在碎石子路上行走、自主蹲下再站起来等许多能力,其还具有较好的稳定性和较强的抗干扰能力。2018年,浙江大学研制出的四足机器人绝影,在各种性能上均已达到了较高的水平[4-5]。


图1.2 Laikago(左)、绝影(右)四足机器人
综上所述,四足机器人的研发已经持续几十年,美国始终在这一领域处于领先地位,而中国无论是技术积累还是科研成果均要落后于国外机器人领域强国。当代四足机器人性能上在步态的规划、运动的稳定性、抗干扰的能力、与环境之间信息的交互等方面已经拥有了较大突破;结构上基于犬类、猎豹、马等生物所设计的仿生腿部结构层出不穷;电机控制上,采用矢量控制、PWM控制等控制方式,单闭环、双闭环、三闭环的控制方案,可达到很好的稳定性和精度。
随着时代的发展,四足机器人将在未来发挥越来越重要的作用,其优势也将愈发凸显出来。本文将以生物犬类为参考对象,设计出一条机械单腿的结构,并研究以无刷直流电机为驱动的机械单腿控制系统的主要性能,研究成果将对未来在机器人实验室的后续研究做铺垫。
1.3研究的主要内容和目标
随着四足机器人将在未来扮演着越来越重要的角色,而机械单腿的稳定工作和快速响应是四足机器人整机稳定快速作业的先决条件,所以,对四足机器人单腿结构和控制系统的研究是对其整机开发的重要前提。机械腿作为承载部件,也是整机运动的底层执行机构,其拥有合理的结构和性能良好的控制系统至关重要。因此,对四足机器人单腿的研究有着重要意义。
本文旨在以生物犬类为仿生对象,设计一款低惯量、灵活度高、承载能力强的四足机器人机械单腿,并以此结构为基础,设计一套以无刷直流电机为驱动的机械单腿控制系统,并分析其性能,完成控制系统的控制实验。具体而言,本文所研究的内容可分为以下两个部分:
(1)机械单腿结构设计及运动学分析。
通过分析现实生活中生物犬的生理结构及运动特性,合理地设计机械单腿的结构形式及各项参数。根据单腿系统的物理参数建立运动学模型,完成正向运动学和逆向运动学的分析,并规划一个周期的机械单腿运动路径。
(2)机械单腿的控制系统的研究。
以无刷直流电机作为关节驱动器,选取TMS320F28335DSP作为电机控制器,结合它们的原理和特点,完成四足机器人机械单腿的控制系统电路及软件的设计,完成电机的控制实验,并结合仿真和实验分析系统的性能。
1.4本文主要结构
从本文的研究内容出发,将全文划分为五个章节进行论述,具体如下:
第一章:绪论。阐述本文的研究背景和意义。结合文献资料,介绍国内外四足机器人发展现状,确定本文的研究内容和研究目标。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: