直角坐标型袋装码垛机器人结构设计毕业论文
2020-02-17 19:50:50
摘 要
直角坐标系码垛机器人是现代工业机器人中的一种,占有很大的比重,通过对直角坐标系码垛机器人的编程控制,它可以实现在x轴、y轴、z轴的制定空间中任意一点的运动和任意点的定位。可以实现在指定空间内任意形式的码垛行为,在日常生产中对取代人工码垛有着很重要的意义,而且在生产线上对解放人力,提高工业生产效率等具备显著的潜力和价值。
我的本次码垛机器人设计步骤如下:
第一步:是对国内外尤其是一些码垛机器人研究应用相对先进特指美国等国研究方向的查阅,并且了解码垛机器人的研究目的、码垛机器人的发展前景和码垛机器人为何可以取代人工码垛。
第二步:是对直角坐标系码垛机器人的方案的选择:通过进行了多次对比和比对,我历经千万苦找到最合适我的的设计码垛机器人的机构方案,我最后不自量力采用龙门式机构,我觉得最好是滚珠丝杆螺母副传动才可以,驱动位置我想了很久最后决定采用步进电机,这样才是我心目中的码垛机器人。
第三步:通过阅读了履带机器人的使用情况与需求的资料来选取结构的选型,主要机构有机械的抓手、直线滚动导轨副、步进电机、滚动丝杆螺母副和滚动轴承等。
关键词:码垛机器人;丝杆螺母;结构设计。
Abstract
Cartesian coordinate system palletizing robot is one of the modern industrial robots, which occupies a large proportion. Through programming control of the right coordinate system palletizing robot, it can realize the movement of any point and the location of any point in the formulation space of X axis, Y axis and Z axis. It can realize any form of palletizing behavior in the designated space. It is very important to replace manual palletizing in daily production. It also has significant potential and value to liberate manpower and improve industrial production efficiency in production line.
My design steps of this palletizing robot are as follows:
The first step is to consult the relative advanced research and application of palletizing robots at home and abroad, especially in the United States and other countries, and to understand the research purpose of palletizing robots, the development prospects of palletizing robots and why palletizing robots can replace manual palletizing.
The second step is to choose the right-angled coordinate system palletizing robot scheme: through many comparisons and comparisons, I have worked hard to find the most suitable mechanism scheme for my design of palletizing robot. Finally, I do not use gantry mechanism independently. I think it is best to drive with ball screw and nut pairs. I think for a long time, I finally decided to use stepping motor. This is the palletizing robot in my mind.
The third step is to select the structure by reading the information of the use and demand of the tracked robot. The main mechanisms are mechanical gripper, linear rolling guide pair, stepping motor, rolling screw nut pair and rolling bearing.
Key Words:Palletizing robot;Screw nut;Structural design
第1章 绪论
现在欧、美、日的多种码垛机器人在现在的企业和市场的已经有90%的占比,现在很多由人力码垛的项目都已经由码垛机器人来做。这三个国家占比多,这样他们就可以垄断现在的码垛市场,占比多就是说话硬,就是专业巨头,他们是巨头,我们为什么就不可以呢,所以我的课题就变得更加有意义。
我国的工业机器人在国家的支持下,码垛机器人巨头国家踩在国内企业头上的这种格局正在被我们一点一点打破。
但是,我们国家的码垛机器人其可以使用的范围和技术上还有很多难关没有攻克,与其他码垛机器人先进的国家相比还有比较大的差距,如国外同类产品我国产品起步稳定性不足只能单一作业,起步也比其它发达国家更加的晚,机械臂的移动速度和在空间的精度准度还比较差。批量生产和发达国家还是没办法抗衡。在国内市场我们的企业还可以风生水起但是到了国外市场就会有很大的差距,我国码垛机器人规模仍然很小,我们距离国外那种巨头企业还有很大的差距,没有自己的完善的生产线。而且现在我们国家的码垛机器人规格很多,批量很小,可以通用的部件很少。
因此我国急需要对码垛机器人和相关产业进行格局的转变,把钱花在刀刃上,努力将码垛机器人产业化。同时我们要从最开始抓起坚持中国特色社会主义,制作码垛机器人有关系的产品,为了加强我国码垛机器人的生产水品而奋斗。
1.1研究的目的及意义
所谓的码垛可以通过根据特定模式以特定模式堆叠对象来基于集成单元化的概念实现诸如存储,处理,装载和卸载运输的物流活动[1]。随着现代工业的快速发展,码垛的基本工业过程日益广泛,码垛在工业中的占比也越来越高,现代工业中,人工码垛的弊端也就日益显露出来,成本昂贵,应用范围小,不能进行过重码垛等等,所以现代工业中码垛自动化的趋势日益明显。
码垛自动化就是指利用编程和指令指挥机械代替人工进行码垛作业,从而解放人力[2]。现代工业中由于工厂都采用自动化生产方式,所以传统的人工码垛方式已经越来越不能适应工业需求,所以国内外公司都在改进自己的码垛设备来解放人力,码垛自动化是现代工业的大趋势,码垛自动化对解决劳动力短缺,提高劳动生产率,降低生产成本,提高劳动强度和改善生产环境具有重要意义。
所以在我的毕业设计之中,码垛机器人就是我设计的侧重点,现在人工码垛出现了效率低、工作量无法适应、大工件无法进行搬运和人工高处码垛易出现为危险等问题,我的毕业设计就是要解决这种问题,一旦机器人进入指定的程序,就可以一天24小时工作并获得人力,既可以解放人力,还可以提高生产效率,并且在一些高处码垛的过程中,机器人基本不会出现失误,避免了人工码垛因为失误而发生危险的可能。
1.2 国内外发展趋势
美国机器人协会(RIA)是一个多功能机械手,具有编程功能,可将机器人定义为:并通过移动各种材料,工具和零件的特殊设备执行各种任务[3]。
中国科学家的机器人定义是:机器人是一台自动化机器,不同之处在于它具有类似于人类或生物功能的智能功能,如识别,计划,移动和协调。非常灵活的自动机[4]。
美国是机器人的发源地,并于1962年开发出世界上第一台工业机器人。经过50多年的发展,美国已成为世界上最强大的机器人制造国之一,拥有强大的基础和先进的技术[5]。
日本随着工业的快速发展,劳动力短缺的问题也已经日益严重,劳动力短缺的问题已经严重影响到了日本工业的经济发展,所以机器人的问世无异于日本工业的福音,随着日本政府大力支持机器人的开发和普及,日本的机器人发展水平突飞猛进,已经发展到了欧美各国,一直处在国际领先地位[6]。
工业生产需求的堆叠已经开始研究人们如何能够快速有效地创建码垛,今天在码垛行业可以分为两种类型的码垛手动码垛机[7]。手动码垛是一项长期高强度的工作,工作,人们需要长期退货的材料,码垛的重复操作,在长时间的工作后人的工作效率会有所下降,而且会产生身体劳损等一系列的问题,而且人工码垛只能用于码垛物料不规律而且质量相对较轻的码垛作业中,而现在人工码垛已经逐渐被自动化码垛取代[8]。
而码垛机器人在20世纪60年代才进入人们的视野之中,20世纪80年代时,国外的机器人公司将机器人技术和自动化技术进行融合,应用于搬运码垛领域。现在生产的码垛机器人一般由机器人本体结构、机器人控制柜和机器人末端执行器三大个部分组成的4轴空间关节式机器人。
现在国外的码垛机器人的研究方向多为关节型码垛机器人,且主题材料多为较轻的铸铁和铸铝,此类机器人多利用FEM和CAD 技术进行优化,如今如何提高码垛机器人在码垛工作时的最大码垛重量和码垛精度更高成为了码垛机器人的重点研究方向[12]。
然而,码垛机器人,中国的最常用的笛卡尔坐标和关节,和关闭型堆垛机器人的结构紧凑,小体,灵活和移动的工作空间是最常用的[13]。
今天,加入上海交通大学机器人研究所Waddy包装技术有限公司,我国码垛机器人TPR系列新一代码垛机器人,独特的线性四节环节,高强度铝的快速发展合金的使用具有节能环保的臂,生产能力可达1600袋/小时[14]。如今,中国码垛机器人存在诸多弊端:首先,现代企业对码垛机器人的技术要求越来越难。这反映在不断增长的码垛行业生产线的吞吐量,低代码错误率,挑选的材料重量和企业灵活性。然后有许多生产环境,所需的容量可以是码垛机器人混合码垛能力之一,仅限于一个码垛,第二个是技术码垛机器人已经成熟,但仍然在现代工业手动编码的许多方面仍然必不可少,但随着技术的发展,人工码垛就必须要被机器人码垛所替代,现在的码垛机器人还只能适应单一的码垛作业,而许多人工码垛的所涉及的复杂的、非单一的码垛环境是现代码垛机器人所不能解决的问题,所以让码垛机器人可以不仅仅进行单一的码垛作业,还可以进行现代工业需要的混合码垛,自动化码垛,这是现代码垛机器人重点的研究方向[15]。
现如今码垛机器人分为许多种,有关节型机器人、直角坐标系机器人、圆柱坐标系机器人等类型的码垛机器人的技术正在慢慢成熟,每一种机器人都有自己的优缺点:
关节型机器人的结构较为复杂,工作范围很大,但是技术方面还没有成熟,对一些负载较重的码垛作业还不能胜任,但是随着技术的一点一点成熟,这种机器人的前景是最光明的,现在还在起步阶段,一般用于一些精度较高的码垛作业,而且现在关节行机器人的缺点也在被慢慢弥补过来。
直角坐标系码垛机器人的优点很多,例如可以承受较大负载,工作稳定,寿命较高,而且技术较为成熟,现在的直角坐标系码垛机器人分为很多的种类,分为悬挂式码垛机器人、龙门式码垛机器人,在工业的方方面面都有着不俗的发展,这种机器人的码垛较稳定,但是确定依然很明显,一是工作范围相对较小,二是占用场地过大,三是对复杂环境的码垛作业无法适应,这些都是现代直角坐标系码垛机器人的弊端,但是优点依旧明显。
本次毕业设计的设计内容是直角坐标系袋装码垛机器人的结构设计,本直角坐标系袋装码垛机器人有关于X轴方向的自由度,Y轴方向的自由度,Z轴方向的自由度以及机械手上的可旋转自由度,此码垛机器人的工作目的是将每个袋装物料码垛起来,可以比最快的人工码垛还快,而且在非故障情况下可以一直工作。可以制作更多类型的抓手,吸盘和抓斗来适应更多样的物料,而且可以重新编程对不同的物料进行码垛处理,相比之下人是不行的,人的力量有大小之分,而且人的力量上限有限,对一些很重的物料是无法进行搬运的,而且强行进行人工码垛还会造成人的身体损伤,这样企业就会收益降低,所以码垛机器人适应不同的码垛对象的特点就凸显出来了,而且码垛机器人的未来是光明的,应用是广泛的,迟早有一天人工码垛会不行,码垛机器人站起来了.
总体来说,现代码垛机器人由两个方面的研究方向,一是码垛机器人要适应多种复杂的工作环境实现模块化生产,比如,需要采用多传感器融合技术,如温湿度、触觉传感器,使工业生产周围的环境以及目标对象得以建模和决策控制。通过这样的策略,来使码垛机器人的适应能力得以提高;其次,码垛机器人的结构在机器结构方面进行了优化。例如,今天的码垛机器人通过采用模块化联合驱动系统简化了创建码垛机器人的复杂和繁琐的结构,没有或没有使用过去的平行平行四边形结构,从而降低码垛机器人占地面积和增加其工作范围。这些都是码垛机器人的重点研究方向,是国内外码垛机器人研究的重要课题,而我的此次毕业设计是直角坐标系码垛机器人,在查阅了诸多资料之后,我发现现在的码垛机器人的稳定还是有待提高,稳定性好的占地面积过大,而我此次毕业设计将会去考虑这些问题。
1.3本文研究的意义
本文主要研究关于直角坐标系机器人的结构设计和对袋装物料的抓取问题,这是此次设计的重点,需要利用查阅的资料和基本的机械知识进行设计。
1.4本章小结
通过本章的论述,让自己对本次设计题目有一个清楚的认识,对我想更清楚地解决这个问题,知道我想做什么,怎么干,了解了国内外发展的趋势,对码垛机器人的设计趋势有一个认知,智能化、数量化发展,为自己的论文提供一个点睛思维,充分发挥自己的想象力去设计制造一个直角坐标系码垛机器人,完成工艺设计要求,并且尽可能去解决自己发现的问题,如果解决不了,回去通过查阅资料等方法来解决问题。
第2章袋装码垛机器人设计方案及要求
2.1 设计方案的基本内容
码垛机器人技术成熟的有关节机器人和直角坐标系机器人,如图2-1所示,本次设计我的设计目标是直角坐标系码垛机器人。

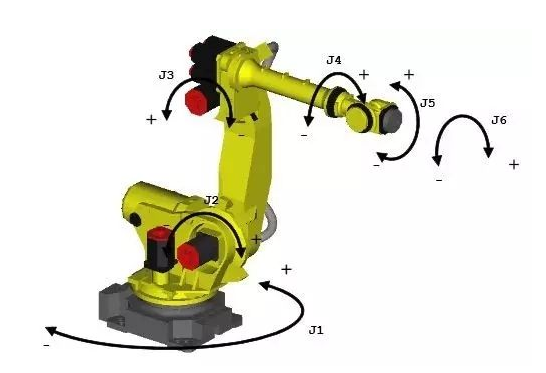
图2-1(a)直角坐标型码垛机器人 图2-1(b)关节型码垛机器人
笛卡尔码垛机器人空间XYZ的3轴正交坐标基于编程系统中,由于自由是三个或更多个轴可实现自动控制,反复编程和重复应用,并且可以适用于多种在自动化设备的任务。它可以携带对象和操作工具来执行各种任务。
主要内容是设计一个具有4个自由度的笛卡尔机器人。四个运动轴对应于笛卡尔坐标系中的X,Y和Z轴,对应于Z轴上的旋转轴。加载和卸载功能。根据需要设计每个轴行程和夹具尺寸和夹持能力。
2.2 参数要求和任务目标
本次毕业设计的题目为直角坐标系袋装码垛机器人的结构设计的总体参数如下:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: