立体仓库堆垛机控制系统设计毕业论文
2020-04-12 16:12:08
摘 要
随着经济的发展,物流领域渐渐地受到了各个国家的重视,成为了技术攻克的重点领域。这其中,自动化立体仓库,作为现当代物流业最为重要的发明,成为世界各国争相发展的对象,而堆垛机作为自动化仓库的核心部分,研究其原理并从根本上提高其运行性能,就显得十分重要。基于上述情况,本文简要介绍了自动化仓库和堆垛机的概念,发展历史,以及目前国内外的发展现状。并从原理出发,设计了一款单立柱双货叉堆垛机控制系统的硬件系统,并编写了软件程序。
本文基于目前对于堆垛机的要求,采用编码器与变频器结合的速度位置双闭环系统,实现了堆垛机的高速稳定控制,同时采用了编码器与认址片结合的方式,实现位置的双重控制,减少了运行出错的概率。系统整体采用了PLC进行控制,提高了处理和运行速度,与其他硬件配合,提高了堆垛机的定位精度和运行速度。软件方面,编写堆垛机整体控制程序,包括运行程序,寻址程序,控制程序。最后还提出一种基于单立柱双货叉堆垛机的作业优化控制算法。
研究及仿真的结果表明,本文的研究成果高效,准确,符合社会的需求,具有推广的价值。
关键词:立体仓库;堆垛机;速度控制;PLC;准确寻址
Abstract
With the development of economy, logistics has become an important part of production, and more and more attention has been received by various countries. Among them, automated warehouses, as the most important invention of modern and contemporary logistics industry, have become the development object of all countries in the world,As a core part of an automated warehouse, stacker cranes are very important to study their principles and fundamentally improve their operating performance. Based on the above situation, this article briefly introduces the concepts, development history of automated warehouses and stackers, and the current development status at home and abroad. Based on the principle, a hardware system of a single-pillar double-pile stacker crane control system was designed and a software program was written.
Based on the current requirements for stacker cranes, this paper adopts a speed-position double-closed-loop system combining encoder and inverter to achieve high-speed and stable control of stacker cranes. At the same time, a combination of encoder and addressable chip is used to achieve the Double control of position and reduce the probability of running errors.
The whole system adopts the PLC to control, improves the processing and running speed, cooperates with other hardwares, and improves the positioning accuracy and running speed of the stacker crane. For software, write the overall stacker control program, including the operating program, the addressing program, and the control program. Finally, a job optimization control algorithm based on a single-pillar double-pile stacker was proposed.
The results of the research and simulation show that the research results of this paper are highly efficient, accurate, and meet the needs of the society and have the value of promotion.
Key Words:High bay warehouse;Stacker;Speed control;PLC;Accurate addressing
目 录
摘要 Ⅰ
ABSTRACT Ⅱ
第1章 绪论 1
1.1 课题背景 1
1.1.1自动化立体仓库概述 1
1.1.2堆垛机概述 3
1.2 本课题的意义及内容 4
1.2.1 本课题的目的及意义 4
1.2.2 本课题的研究内容 4
第2章 堆垛机控制系统的硬件设计 5
2.1堆垛机机械结构设计选型 5
2.2 系统的控制要求与总体设计 6
2.2.1 系统的控制要求 6
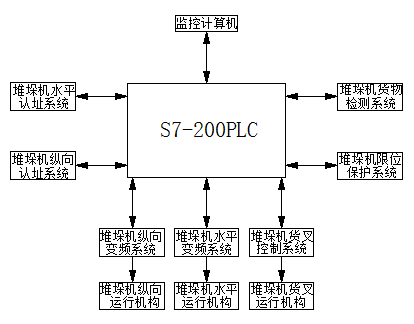
2.2.2 控制系统总体设计 7
2.3 堆垛机位置控制系统设计 8
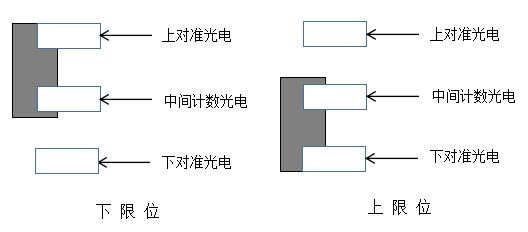
2.3.1 光电开关及认址片寻址方式介绍 9
2.3.2认址(定位)方式的比较 9
2.3.3认址方式确定 9
2.4 调速系统设计 10
2.4.1 堆垛机运行速度曲线分析 10
2.4.2闭环变频调速控制 11
2.4.3水平变频调速系统设计 12
2.4.4竖直变频调速系统设计 12
2.4.5 调速系统硬件选型 12
2.5 货叉伸缩控制系统设计 14
2.6 PLC选型及资源配置 15
2.6.1西门子S7-300系列PLC简介 15
2.6.2 CPU型号选择 15
2.6.3 PLC扩展模块选型 16
2.7货架检测传感器选型 17
2.7.1 货位检测传感器 17
2.7.2 货物突出传感器 17
2.8 元器件选型清单 18
2.9 通信方案的确定 18
2.10 I/O点安排 18
第3章 堆垛机控制系统程序设计 21
3.1 控制系统程序总体设计 21
3.2控制程序的实现 22
3.2.1堆垛机主控制程序 22
3.2.2堆垛机自检及复位子程序 23
3.2.2列向自动运行程序 24
3.2.3 堆垛机手动运行控制程序 31
3.3 作业优化扩展算法 32
第4章 总结 34
致 谢 35
参考文献 36
第1章 绪论
1.1 课题背景
1.1.1自动化立体仓库概述
仓储物流,作为生产流程的“末端”,对整个生产流程的效率有着重要的影响。而对于制造业来说,效率高就意味着社会必要更大的利润,因此对仓储物流的研究具有很重大的意义。现如今,科学技术蓬勃发展,物流技术领域相比上世纪也发生了翻天覆地的变化,一种新型的仓库——自动化立体仓库随之诞生。自动化立体仓库主要由高层货架、货物运输与分拣设备、智能控制和信息管理系统及附属部分组成,利用自动化搬运设备进行货物的出、入库作业[1]。
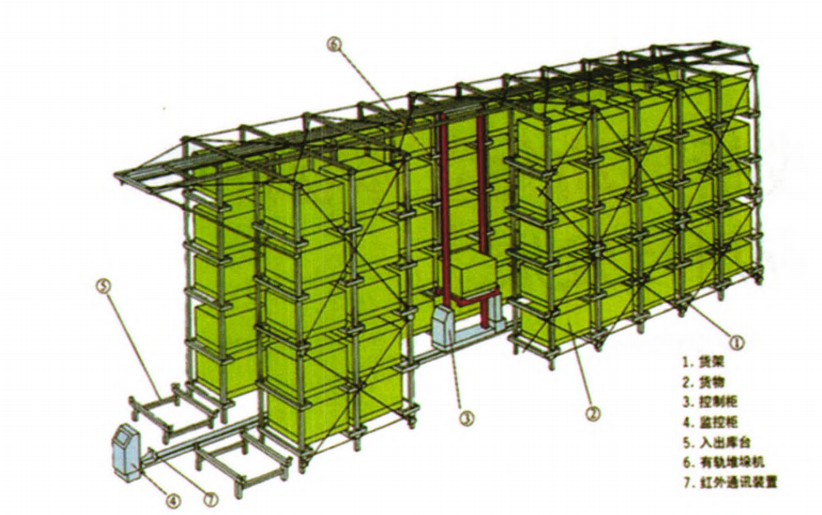
图1.1 自动化立体仓库示意图
自动化立体仓库最早出现在二十世纪五十年代的美国,并在之后的一段时间内展现出了对于提高工业生产效率的巨大优势,随后得到了迅速的发展,也成为了生产技术发展研究的重要项目之一。第二次世界大战之后,世界上各个发达国家都开始了高速发展的进程,1950年,为了提高单位面积的存储货物数量,美国出现了高层货架仓库的概念,其设想高度最高可达40米,同时期美国也研制出了一种桥式起重机,这种起重机在仓库顶端悬挂两根梁,中间有一个立柱,利用立柱的上下伸缩以及立柱的周转实现货物的运输和存放。但是由于受当时技术条件的限制,这种起重机是手动控制的,因此它也和高层货架仓库一次被称为自动化立体仓库的雏形。不久后,一种名为巷道式堆垛机的机械出现,这种堆垛机采用上下导轨结构,堆垛机在双导轨中运行,这种结构既节省空间又能有效防止堆垛机翻覆,因此很快取代了桥式起重机并促进了立体仓库的发展。1963年,随着计算机技术的蓬勃发展,美国率先将计算机技术同立体仓库结合起来,实现了机械的自动化控制,这也宣告了自动化仓库的诞生,之后,自动化仓库进入了蓬勃发展阶段,美国和欧洲各国都相继开始大力发展自动化立体仓库。不过发展最快的当属日本,从二十世纪六十年代中期起,日本开始研究自动化仓库以及堆垛机的相关技术,之后的进展突飞猛进,现在已经成为了世界上拥有自动化仓库技术和数量最多的国家之一[2]。现阶段,以自动化高层仓库取代传统人工仓库已经成了一种潮流,据不完全统计,美国拥有各种类型自动化仓库20000多座,日本则接近美国两倍,达到了接近40000座,德国也有近万座,其他发达国家也有数量众多的自动化立体仓库[3]。由此可见发展自动化立体仓库具有重大意义。
到目前为止,自动化仓库经历了许多次变革,可以说相比于最初的雏形发生了翻天覆地的变化,有学者将其总结为五个重大阶段,分别是:人工控制阶段;自动化控制阶段,计算机集成化控制阶段;智能化立体仓库阶段以及智能存储检索信息管理系统阶段[3]。其中,第三阶段即计算机集成化控制阶段是自动化立体仓库发展脱胎换骨的一个阶段,由于计算机技术的引入,仓库的控制冲破了“自动化孤岛”——仓库各部分的自动化控制只是局部的,无法进行联系,协同工作的限制,并形成了管理,监控,执行的三层体系,大规模脱离人的控制,并且引入计算机技术也为之后仓库的智能化发展做了铺垫。目前,大部分的立体仓库都在从第四阶段向第五阶段过渡,这一阶段的立体仓库的功能不只局限于货物的仓储运输,而是作为一个货物信息的综合管理平台,智能的处理货物的出入库信息,包括种类和数量等,并结合近年来高速发展的大数据技术以及人工智能技术,智能产生库存量调整建议。这也是未来几年内自动化仓库发展的主要方向。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: